高精度地图数据逻辑结构及重要技术
2022-06-24汪堃
汪堃

摘 要:近些年来,高精度地图技术的迅猛发展,促使智能汽车领域迎来了全新的发展契机,高精度地图技术作为智能汽车实现自动驾驶的重要保障,然而,由于我国缺乏对于高精度地图技术的研究,致使此项技术难以合理运用在智能汽车领域中。因此,相关人员根据实际情况,完善高精度地图内的各种信息数据,促使高精度地图能够合理应用到智能汽车中去。基于此,本文详细说明了高精度地图数据逻辑结构,并给予了构建高精度地图的关键技术。
关键词:高精度地图 数据结构 关键技术
High-precision Map Data Logic Structure and Important Technology
Wang Kun
Abstract:In recent years, the rapid development of high-precision map technology has prompted a new development opportunity in the field of smart cars. High-precision map technology is an important guarantee for smart cars to achieve autonomous driving. However, due to the lack of high-precision map technology in my country It is difficult for this technology to be reasonably applied in the field of smart cars. Therefore, relevant personnel improve various information data in the high-precision map according to the actual situation, so that the high-precision map can be reasonably applied to the smart car. Based on this, this paper describes the logical structure of high-precision map data in detail, and gives the key technologies for building high-precision maps.
Key words:high-precision map, data structure, key technology
1 引言
高精度地圖也被称之为高精地图,其中涉及到的数据以及内容极其丰富,然而,传统形式的电子地图误差能够达到10m,并且不具备相应的三维信息,而这种精度的更高的地图通常可以将误差控制到0.2m左右,并且具备极其丰富的三维信息,既可以与智能车辆实现实时匹配,还能帮助车辆在行驶过程中有着更为优秀的行驶路线。
2 数据逻辑结构以及应用分析
2.1 智能高精地图数据结构
通常情况下,更加科学合理的数据逻辑结构应包含以下几点特征:其一,需要地图中有着更加详细的信息数据,能够在第一时间内充分反映出地图目标在现实世界中的位置;其二,地图需要具备高度动态的道路信息,并且实时呈现周边情况,确保驾驶人员能够解决各种突发状况。
著名企业BOSCH公司在2007年就提出了局部动态地图的概念,通过合理运用动态数据,可以将地图大致划分成4层,静态数据、半静态、半动态以及动态四种层级,而这种全新的动态数据逻辑逐渐成为了高精度地图设计工作极其重要的参考数据。除此之外,智能驾驶不仅要具备极其优秀的安全性,还应该充分考虑广大出行用户是否有着更加智能化的体验,这就为智能数据逻辑结构的生成奠定了有利基础。
2.2 静态地图数据
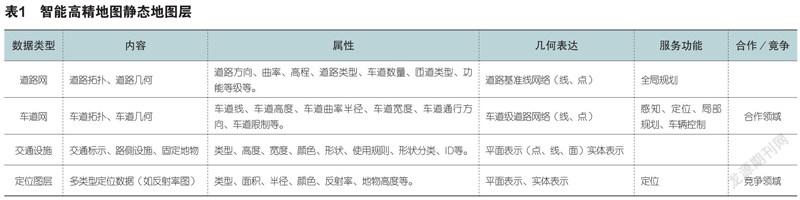
静态地图数据作为高精制图工作的重要构成部分,同样也是完善高精度地图内容的主要框架。相较于传统种类的电子导航地图,此种地图数据优势在于能够对车道进行详细描述,并且能够了解并掌握道路附属设施的实时情况。从另一种角度而言,静态地图数据可大致分为传统形式的标准地图以及车道级辅助地图,其中包括车道、道路网以及道路周边设施等相关内容。
其一,道路网。通常以传统二维导航电子地图中的各类基础道路为主要基准。适当加入三维信息,确保最终显现的道路几何形态更加精准。除各类道路以及路口外,还应该包括道路与各个车道之间的关系,在物理数据模型中主要表现方式为外键关联。
其二,车道网。主要目的在于详细阐述车道几何位置信息。通常情况下,车道主要构成部分应包括相应的车道基准线以及连接点等相关内容。从另一层面而言,各个路段的车道应通过更加合理的连接点最终形成直接关系,现如今,车道网已然成为了宏观车道级路径优化工作的重要基准,同时也是车道变换的基础[1],见下表1。
2.3 动态地图数据
通常情况下,更加完善的动态数据层应包括车辆、行人以及交通信号灯等各种动态程度较高的信息数据,再加上动态数据层有着两种不同形式的信息来源:其一,车载传感器。其中包括摄像头以及雷达等设施,这类设施能够在第一时间内获取到周边环境的各类信息,通过这种手段获取到的信息数据也被称之为主动感知动态信息;其二,通过智能交通系统或者通过外部系统给予的各类信息,也被称之为被动感知动态信息。从另一种角度而言,以这种方式获得信息主要是以V2X信息为主,其中应包含GNSS数据、航向以及车辆速度等相关内容,大致情况如表2所示。除此之外,各类车辆主要是以动态信息预测作业,实时判断车辆运行过程中周围物体的运动轨迹,并获取运行道路上各种交通信号,防止在能见度较低的交叉盲点上车载传感器的视野盲区,确保各种车辆在行驶过程中更加稳定,广大人民群众的生命安全也会得到保障[2],见下表2。7D4E8B41-F00E-443A-8331-D4EBF9E01BFA
3 计算模式与更新技术
3.1 计算模式
维护更新作为地图计算层面极其重要的问题之一。要想有效处理计算层面的各种难题,应根据实际情况,选择更加科学合理的计算模式,以此确保最终获得结果更加精准。由于智能高精地图涉及到的各类信息数据较为复杂,这就导致信息数据难以在第一时间内得到更新。再加上终端所显现的计算能力极其有限,导致终端难以处理大量的信息数据。传统形式的云计算模式,通常是以核心集中式为主要数据处理方式,在实际运行过程中云端也会极易出现负担过重状况,致使数据处理作业难以正常实施。这就需要相关人员应根据实际情况,创设更加科学合理的计算模型。
边缘技术作为一种网络边缘实施计算工作的模型,而边缘通常是指数据源至云计算路径之间的任意计算以及网络资源。此种计算模式的优势在于延时较低以及准确度高等特征。从另一种角度而言,边缘计算涉及到的理念以及云计算技术,能够在边缘基础设备种构建一个处理效率更高的云计算平台,也被称之为边缘云技术。此种技术作为中心云的延伸,继承了中心云极其优秀的计算能力以及存储能力,并以此为基准,不断优化自身的各种能力,并且在实际工作中,最终形成更加健全的技术架构(云边端三体协同)。
要想促使智能高精地图长时间维持周期性数据更新,应需要在相应范围内获得更多的道路数据作为主要支撑。仅仅依靠单一的测绘作业无法在第一时间内充分实现全方位覆盖作业。通常情况下,用户众包作为确保高精地图达到实时性标准的额重要方式,同样也是高精地图最终形态的主要构成部分,现如今,众包已然成为了群智感知实施分布式任务一种独特的分配以及执行机制,不仅能够根据各类需求合理分配给个人完成任务,还可以通过自由自愿形式外包给大众完成相应任务,最终耗费较低的成本资金完成计算机无法完成的任务。
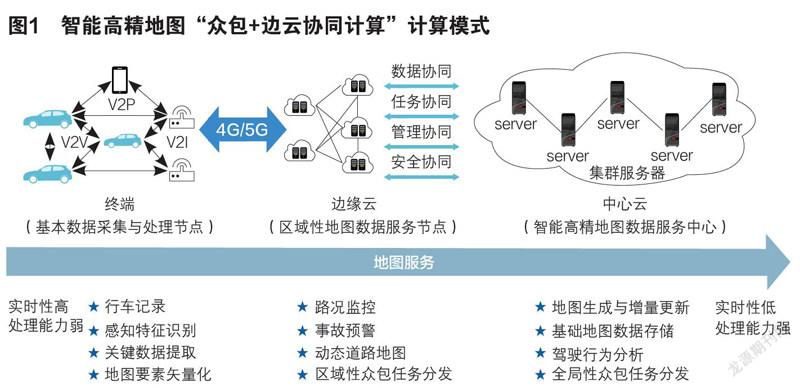
由此可见,要想确保数据处理作业有着更为优秀的实时性,应根据实际情况,通过更加科学合理的设计方式,从多方面、多角度实现“众包+边云协同计算”设计模式,促使最终显现的高精地图更加智能化,大致情况如图1所示。图中显现的设计模式,应以终端、边缘云以及中心云3层架构为主要技术支撑,确保最终显现的集中式处理能力达到预期标准,在信息效用方面也能够充分发挥出相应的作用价值。与此同时,还要以众包化分配机制为主要实施支撑,合理应用群体智能较低的成本在规定时间内完成各类情况较为复杂的任务,促使地图能够得到实时更新,并且达到可量产化目标[3]。
在具体应用的过程中,应始终遵守以下几点内容:其一,中心云端应构建更加科学合理的地图数据服务中心,重视非实时以及长周期数据等各类业务需求,其中包括大数据分析;AI机器学习以及数据存储等相关内容,促使各类功能的作用价值能够充分得到显现;其二,以边缘云端为主要基准构建的地图数据服务节点,应重视短周期数据信息处理以及多源异构等各种数据处理作业,从多方面、多角度充分满足各种业务需求,其中包括区域数据处理作业以及数据可视化等相关内容,促使路况管控以及事故预警等各种功能能够顺利开展。
3.2 更新技术
通过合理实施众包方式不仅能够实现地图数据的实时更新,还能够从多方面、多角度充分确保功能测试以及车辆自动驾驶作业可以实现顺利开展。理想状态下,各方应运用统一的行业标准,通过资源共享以及信息互换等方式确保道路信息实现全方位覆盖。要想促使高精地图网以众包方式顺利实施信息数据采集作业以及更新作业,应重视众包方式的作用价值,然而,现如今我国具备的众包更新技术明显存在着诸多的不足之处,严重阻碍地理信息的合理使用。如何提升众包方式的数据质量,充分满足智能高精地图制图的各类需求,已然成为了制图工作的难点。
对于众包数据当前存在的问题,例如,数据冗余以及数据缺失等各类状况,人工智能技术已然成为了一项极其高效的解决对策。“众包+人工智能+摄像头”众包更新技术路线逐渐成为了企业开展相关工作的主要方式,最终显现的结果也能够达到预期标准。
其一,在终端层,由于终端层涉及到的信息数据较为杂乱,如若不能将全部的信息数据传输到云端,就极易发生数据冗余状况,应用价值更高的信息数据有可能被无效数据覆盖,从另一种角度而言,由于各类因素(天气、光照以及拍摄距离)影响,再加上物体本身会发生磨损以及相关变化,导致终端具备的有限性能极易导致数据发生丢失状况。所以,应对终端层实施数据二次加工,其中包括感知特征的有效提取以及地图要素矢量变化,从而保证最种显现的数据质量达到预期标准,避免众包数据体量出现较为严重的状况。其次,在具体应用时,应了解并掌握Learn技术的作用价值,根据实际情况,合理应用此项技术,确保最终显现的高精地图更加精准、稳定。现如今,此项技术所显现的各类优势已然成为了制图领域的研究重点,作为人工智能技术的主要代表,深度学习技术还能够依靠处理效率更为优秀的CPU最终形成的神经网络模型也能对图像数据实施效率更高的自动化处理作业[4]。
其二,云端层作为集中众包数据的主要区域,由于传感器性能以及数据格式等各类差异,导致数据质量难以达到预期标准,因此,需要根据实际情况,合理分析实施的学习方式,通过优化学习方式,对各类数据实现二次加工,其中包含特征提取以及质量优化等相关内容,并对各种无效信息开展过滤工作,确保信息提取作业不会受到劣质数据影响,从而保证最终显现的中报数据精度更加精准。与此同时,在具体应用过程中,应充分运用人工智能以及大数据处理技术,确保在海量的信息数据中获得价值更高的信息数据。例如,在特征提取方面,应实施深度学习目标检测以及分割机器视觉等各种技术,促使提取过后的信息质量更加优秀,从另一种角度而言,图像超分辨率技术能够优化图像以及视频的清晰度,在数据融合方面,应根据众源轨迹数据的实际空间分布特征,合理融合相应的车载轨迹数据,确保属性信息识别工作能够正常运行[5]。
4 结语
总而言之,智能高精地图已然成为了广大人民群众日后出行的重要部分。通常情况下,出行即服务理念的出现充分满足了广大人民群众的各类需求,這就需要以人为中心,以交通基础设施以及运载工具等各种系统为重要基准,合理推进交通运输资源实现在线集成以及共享作业,并充分运用大数据决策的优势从多方面、多角度实现资源合理配置,促使出行更加安全可靠。智能高精地图如若能够实现交通资源最优化配置,就要充分发挥出交通资源联动工作的作用价值,从问题根本上解决各种状况,确保广大人民能够实现高质量出行。
参考文献:
[1]杨振凯,华一新,訾璐,等.浅析高精度地图发展现状及关键技术[J].测绘通报,2021(6):7.
[2]陈龙,刘坤华,周宝定,等.多智能体协同高精地图构建关键技术研究[J].测绘学报,2021,50(11):10.
[3]陈旭.基于多传感器信息融合的地图构建和移动机器人导航研究[D].重庆邮电大学,2020.(24):14.16
[4]杨殿阁,李庆建,王艳,等.高精动态地图基础平台参考架构和技术路线[J].智能网联汽车,2021(1):10.
[5]许广宏,陶靖琦.基于高精地图的自动驾驶中法规分析与应用集成解决方案[J]. 上海汽车,2020,No.364(12):20-27.7D4E8B41-F00E-443A-8331-D4EBF9E01BFA
