基于人工智能算法的校园安全无人机预接警系统设计
2022-06-23张文剑蔡凌曦
陈 科,张文剑,蔡凌曦
(成都工业学院 经济与管理学院,成都 611730)
随着教育需求的日益增加,各类学校的在校生数量呈逐年上升的趋势。校园面积、校园景观营造的复杂度也随之增大,高楼、水域、小树林等建筑元素常见其中,校园安全事件常在这些区域发生。目前的校园安全工作中,预警处理仍大多依靠人力来完成,且预警效果不佳。在人力预警模式下,要提升安全警情的预警能力,主要办法是增加人力预警的区域、时间和频度。尽管在这3个方面尽量加大投入,但其实用性和持续性都较差,并且会受到人员素质的制约。在此背景下,找到一种持续性强、受人为因素影响小、预警及时、有一定接警处理能力的校园安全预警解决方案是非常迫切的需求。蔡烜等[1]提出采用固定区域音视频数据进行分析的方案,但在预警地域面积上有明显的局限;秦伟等[2]采用无人机进行固定区域固定线路的应急救援的解决方案,相对功能较单一,主要针对于应急救援,与校园安全的多样性需求有一定的差异。
基于近年来无人机技术[3]、人工智能技术的快速发展,以及校园安全警戒区域相对广阔的特性,通过对已有技术的拓展,本文构建了一个基于深度学习算法的识别群落并搭配以现有成熟的无人机监测硬件来形成一个自动化程度高的预接警系统平台,有效解决主、被动状态下的预接警场景下的时效、快速反应等问题。
1 硬件系统设计
硬件系统的一部分是信息系统硬件设备,该类设备中主要考虑数据处理的即时性能即可。另一部分是无人机硬件设备群,它包括无人机主体硬件、无人机采集硬件、无人机通信硬件、无人机自动充电硬件。
1.1 无人机主体硬件
虽然无人机的形态多种多样,但通过多年的实践和总结,在基于军事目的的侦查、监视场景的应用和基于民用目的的巡查、跟踪场景的应用下,四旋翼自主飞行器系统的特点非常符合当前系统的设计需求。此类的飞行器运行成本低(造价成本、事故代价成本低)、飞行稳定、结构规范、批量复制难度小,并且因为四旋翼的设计,能够按照既定轨迹飞行,并且更平稳地获取拍摄影像。同时,可以保证载重力、续航能力的需求,这些都是后续应急救援系统实现的基础。
鉴于目前无人机研究领域的现况,四旋翼飞行器在飞行姿态算法和图像获取及跟踪算法上都有较丰富的选择[4],如基于卡尔曼滤波器的神经模糊PID算法、Mahony互补滤波算法等,在后续的实际场景的研究和应用中也便于根据实际需求进行开源二次开发。
1.2 无人机功能硬件
为满足平台设计中的载物、图像采集、语音采集、偏光场景(光线不好的场景)等需求,在飞行器的外观设计中,需配置小型轻质结构吊篮;在飞行器的采集硬件设计中,需配置类似OpenMV的嵌入式摄像头和声音采集模块以及强光照明;在飞行器的通信硬件系统中,需配置类似Radio数传模块、富斯i6接收器等通信模块。飞行器的自动充电硬件系统可采用通用的锂电自动充电装置即可。
2 软件系统设计
平台软件系统的正常运行,建立在无人机飞行器的预定正常工作状态下。这个正常工作状态主要由飞行器的控制系统、数据通信交互系统来保障。
飞行器的控制主要分为自动定点巡航和人工手动控制2种方式。在正常的系统工作状态下,飞行器默认处于自动定点巡航状态。该状态下,系统控制台预先设置图像预警点位,飞行器根据航线自行巡航到预定点位进行图像采集预警的操作。飞行器每完成1架次的巡航工作即返回预定的自动充电位置进行充电。前1架次的飞行器起飞后,根据航线信息配置的间巡时间,下1架次的飞行器起飞开始巡航。根据航线长短,也可在同航线上设置多架次分区段巡航。自动定点巡航功能可以通过成熟的地理信息系统(Geographic Information System,GIS)配合完成。人工手动控制主要应用在需要特殊飞行的状态下,可以通过解除自动巡航状态来获得人工操作权限。例如,在接到预警需要进一步探查时;在接到被动语音接警状态时;在进行紧急救援状态时。
数据通信交互系统主要处理无人机飞行器与软件系统间的信息交互,接收无人机的采集信息进行处理与分析,将分析后的指令发送到无人机,以及人工控制状态下的即时通信系统。由于无人机的采集信息涉及到大量的图像、声音数据,因此,采用智能遥感技术将压缩后的数据进行视距微波传输或超视距数据网络传输,以保证数据传输的即时性,提高预警系统的类别识别速度。
软件平台的设计采用Pyhton语言编程,数据库系统使用MySQL数据服务。在Python语言环境中,软件平台所需用到的飞行器控制系统、图像识别系统、人工智能算法、数据可视化等功能皆能满足。Python+MySQL的开发模式也是目前主流的开源开发模式,可以为系统的软件开发节约大量的实际成本。
软件系统主要由运行环境设置、无人机预接警系统、人工接警系统构成。系统运行环境设置模块主要设定系统环境参数、预接警系统中的各项系统参数、各业务模块数据管理的参数。预接警系统主要有主动预警和被动接警。主动预警系统主要处理由无人机航拍采集到的图像进行智能识别后的信息再通过深度学习算法得到相应的分类标志进行类别预警。被动接警系统则是通过采集巡航线路周边有效范围中的听觉信息,进行语音识别和机器学习算法得到分类标志,推送对应的预警信息。人工接警系统可以进行分布式部署,根据类别预警的判断和被动式接警的信息判断,接驳对应的接警团队进行人工介入。系统主体框架如图1所示。
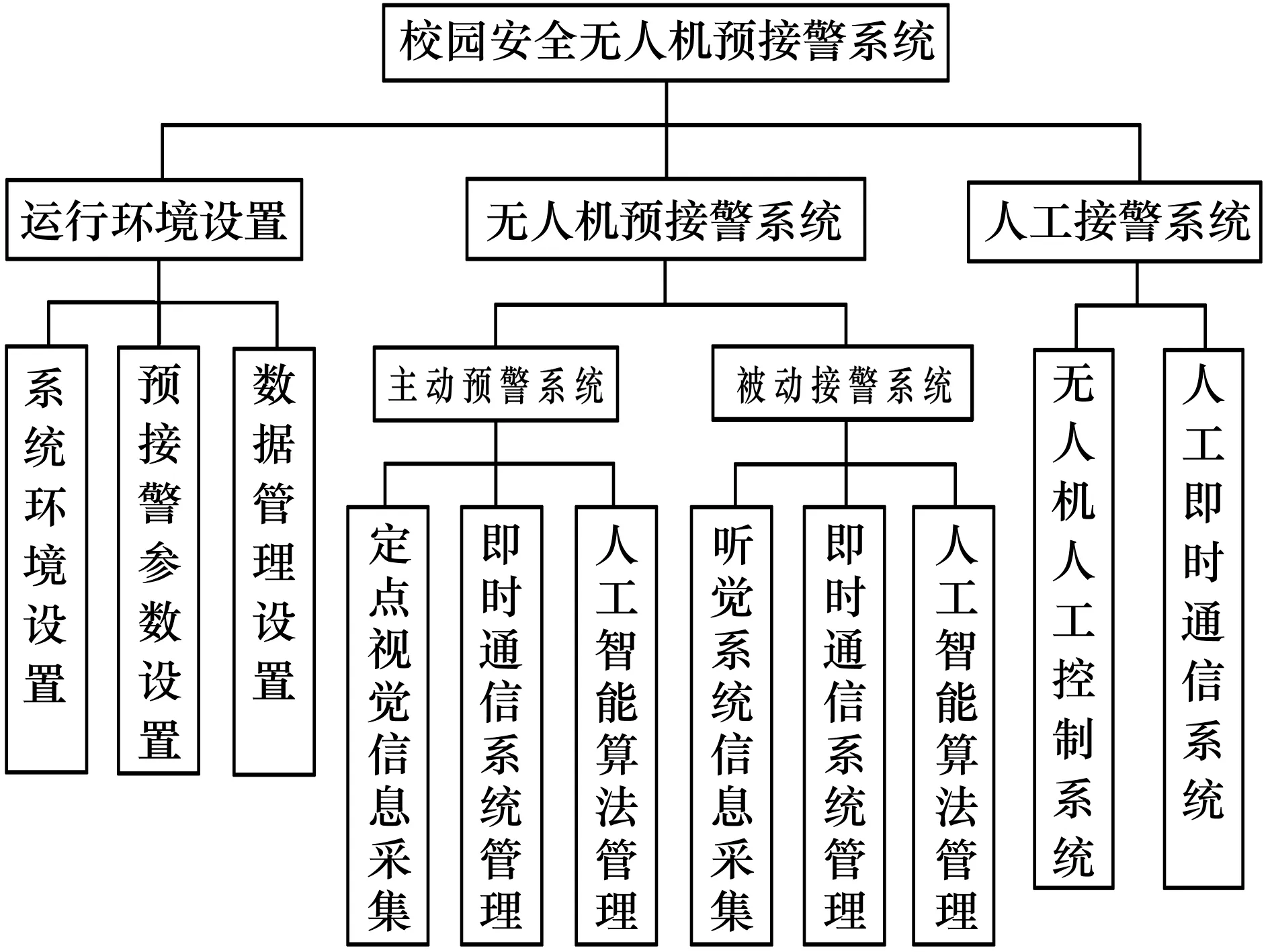
图1 软件系统框架
2.1 运行环境设置模块设计
该模块主要对整个软件系统正常运行所需要的各类参数进行设定。系统环境参数包括飞行器的巡航路线、间巡时间、可用于巡航的飞行器数量等。预接警参数包括预警点位、视觉采集参数、听觉采集参数等。数据管理主要针对整体数据的常规管理以及对于人工智能的各个算法的详细参数设定等。
2.2 主动预警、被动接警系统设计
预接警系统主要由主动预警系统和被动接警系统构成,是安全保护的主要功能模块,也是整个系统的运行中枢。
主动预警系统主要作用于飞行器按既定路线巡航至预警点后进行的预警工作。飞行器巡航至预警点后,进行视觉采集,再通过图像识别算法获取图像异常点标志量,通过对标志量特征的神经网络算法给出预警信息,接驳对应的人工接警终端。其工作流程图如图2所示。
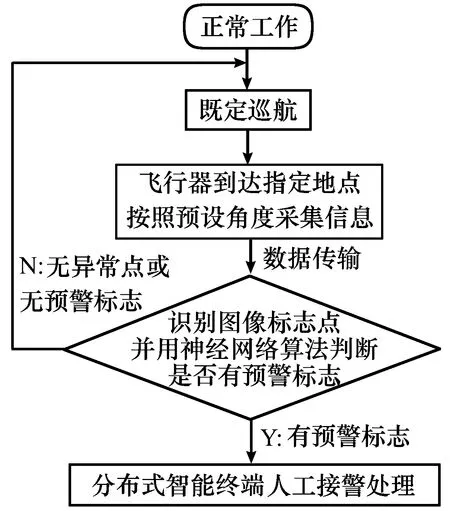
图2 主动预警系统工作流程
飞行器巡航至预警点位时,按照预定角度的视野布局图对视觉信息进行视频采集。同时,系统后台按照设定的时间间隔对采集到的动态信息进行静态截取,并对截取到的图像信息进行识别[5-7],对给定角度的视野图标志物进行提取。经过连续多次提取信息的对比,获取静态截取信息中的异常点信息、异常点运动轨迹信息、异常点面积、异常点运动速率等分类标志量。将该组分类标志量带入预先训练好的神经网络模型中,得到对应的报警分类标志。神经网络算法用于训练集的标志量特征设计如表1所示。最终,根据计算出的报警分类标志,例如:无异常、水域内危险行为、水域边危险行为、高空危险行为等,系统将预警信息推送到对应的分布式接警智能终端,由对应人工接警点位进行后续防护、救援工作。

表1 预警模型训练集主要特征
在本模块的具体实现中,通过将图片数字化后进行对比,获取前后图像像素点的差异,再将差异点提取为异常点坐标(即异常点分类标志量),然后采用卷积神经网络模型进行报警分类计算。该模型属于目前非常流行的人工智能分类算法模型之一,特别适用于计算机视觉。同时该模型还擅长处理训练数据集较小的情况下,通过卷积运算、最大池化运算等优化措施得到精确度高的分类结果。本设计中图像异常点的集合模式可能会比较集中,导致训练集数据间差异较小,也就间接造成实际上的小训练集数据,非常适合卷积神经网络的应用。
被动接警系统主要作用于飞行器既定线路的巡航作业中。在该过程中,飞行器的听觉采集系统处于持续工作状态。听觉采集系统主要采集飞行器下方声波信息,再传送到系统后台,使用经验模态分解(Empirical Mode Decomposition,EMD)+梅尔频率倒谱系数(Mel-Frequency Cepstrum,MFCC)+主成分分析(Principal Component Analysis,PCA)+矢量量化(Vector Quantization,VQ)的组合去噪算法[8-9]提取声音数据并转换为洁净文本信息[10]。对清洗好的文本信息,采用中、英文的切词处理,获取出例如“落水”“来人”“救命”等关键词的待处理切词集合,一旦待处理切词集合中包含报警关键词,即向飞行器发送接警指令,让飞行器根据声波传播强弱原理逐步靠近声音源。同时,使用人工智能文本识别算法中常用的朴素贝叶斯分类器识别出报警类别,根据报警类别接驳对应的接警点,并将即时影像传递到接警点,让接警点获取手动控制飞行器权限。被动接警系统工作流程如图3所示。
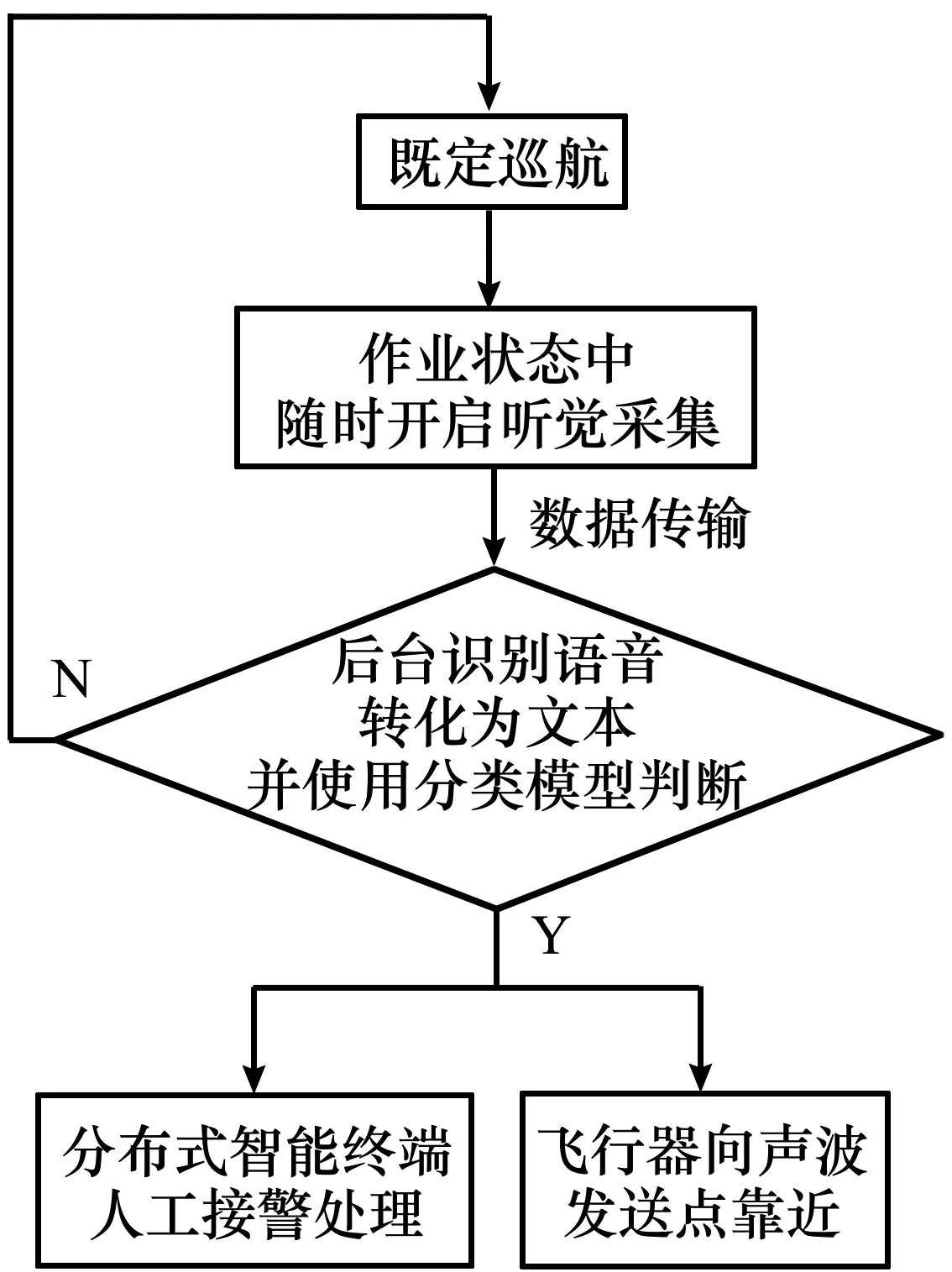
图3 被动接警系统工作流程
声音识别采用EMD+MFCC+PCA+VQ的算法模式,该算法选取基于EMD的能量比和MFCC的特征提取算法为基础,再使用PCA降维算法进行融合处理,最终用VQ分类器对音频进行精准分类。而文本分类模型采用目前人工智能文本分类模型中效果较好的朴素贝叶斯分类器来实现。
朴素贝叶斯分类器主要通过古典的朴素贝叶斯算法对给定的文本训练集基于相对独立的特征条件进行计算联合概率分布。再将待分类的文本信息基于联合概率分布计算出后验概率,即文本所属分类。因为该分类器是通过条件概率进行计算后验概率,所以可以更精准地判断声音采集系统采集到的听觉信息所属的报警类别,可以让更适合的接警点尽快介入接警救援。朴素贝叶斯分类器主要算法如下:
通过先验概率分布和条件概率以得到联合分布P(X,Y):
P(X,Y=Ck)=P(Y=Ck)P(X=x|Y=Ck)=
P(Y=Ck)P(X1=x1,X2=x2,…,Xn=xn|Y=Ck)。
(1)
其中式(1)的计算,朴素贝叶斯模型假设X的n个维度之间相互独立,这样可以得出:
P(X1=x1,X2=x2,…,Xn=xn|Y=Ck)=P(X1=x1|Y=Ck)P(X2=x2|Y=Ck),…,P(Xn=xn|Y=Ck)。
计算出所有的K个条件概率P(Y=Ck|X=X(test)),然后找到最大的条件概率对应的类别。预测的类别Cresult是计算结果最大化的类别,数学表达式为:
(2)
P(Y=Ck|X=X(test))时,式(2)的分母是一样的,都是P(X=X(test)),因此,预测公式可以简化为:
利用朴素贝叶斯的独立性假设,就可以得到通常意义上的朴素贝叶斯推断公式:
2.3 人工接警系统需求及设计研究
人工接警系统主要由智能接警终端和飞行器手动控制终端组成。该系统用于接收经过预接警识别的分类报警信号,通过对分类报警信号的识别,接驳对应的人工接警点。
智能接警终端的硬件设备采用通用智能终端设备,但需配备声、光控报警功能,须能强制性地对报警信号进行提示,例如红光闪烁、蜂鸣报警等。接到报警信息后,智能接警终端显示报警点地图、报警分类、推荐救援设备等信息,并同时启动手动控制对应飞行器的权限。
通过手动控制飞行器,获取实时的险情状况,并让飞行器靠近险情地点,释放飞行器自带的小型应急救援设备,让遇险人员可以初步自救,提高后续救援成功的概率。在飞行器的载重范围内,可配置轻质救援绳索、应急照明设备、应急水上救生设备、应急药物等小型应急救援设备于飞行器下方的轻质结构吊篮中。
3 结语
本系统采用成熟的无人机硬件模块及开源的人工智能算法进行配合,可以有效解决在校园安全问题中的对可变危险场景的有效巡检,对遇险状况的灵活接警和即时救援,对未知场景的声音呼救的及时接警。在该模式的运行状态中,只需通过设置巡警飞行器的数量和间隔的时间参数,即可达成对巡视区域的持续性保护,预警阶段几乎不受人力因素的制约;在接收到警报信息时,不但可以使用飞行器自带的小型应急救援设备展开即时营救,还可以通过人工智能算法,更加精确地判断遇险类型,让更适合的接警点快速展开针对性的快速救援。
随着无人机硬件和人工智能算法的发展,通过对系统的简单改造,可以让该系统的主机平台装载到移动装备中,这样可以完成预定区域的预接警任务,不一定局限在校园区域。
