基于无线传感人脸识别的空间弱小人体目标跟踪方法*
2022-06-06卢超超
卢超超,彭 炜
(1.山西警察学院 侦查系,山西 太原 030401;2.大同大学计算机与网络工程学院,山西 大同 037009)
无线传感人脸识别技术是结合无线传感与人脸识别于一体的创新应用技术,该技术主要依靠无线传感器与计算机的性能,对采集的人脸图像进行特征识别,以用于身份认证[1]。 该技术是人工智能的关键分支,通过无线传感器采集人脸高清图像,可以高效精准地识别人脸特征,还能通过二进制描述子识别较多的图像特征[2]。 基于无线传感人脸识别的检查技术,能够完成不同人脸特征点[3]的差异化检测,以识别不同的图像特征。
在弱小人体目标跟踪的任务中,进行空间人脸识别能够有效避免跟踪误差[4],并提高弱小人体目标跟踪的效率。 对于复杂的背景环境,空间弱小人体目标存在一定的运动特性[5-6],并且具有较小的成像尺寸,因此,对其进行识别与跟踪十分复杂。 陆福星等人[7]基于背景自适应与多特征融合的弱小人体目标跟踪方法,对采集的红外图像进行噪声点去除,并分割出弱小人体的大面积平稳背景。 提取弱小人体目标的灰度特征,消除目标灰度特征集合中的假目标像素,完成弱小人体目标跟踪。 但该方法对于空间弱小目标的跟踪存在虚警概率高等问题。 杨其利等人[8]提出了基于全卷积递归网络的弱小人体目标跟踪方法,该方法利用全卷积递归网络提取弱小目标的特征,并通过深度递归监督进行目标特征参数的修正,从而完成弱小人体目标的跟踪。 但是,该方法仅将部分空间弱小人体目标作为跟踪对象,并且对弱小人体目标数据检测概率不高。Manit 等人[9]提出基于深度迁移学习的人体目标检测方法,该方法采用近红外激光扫描方法采集人体目标图像,并将采集的图像输入到深度迁移学习的卷积神经网络中进行训练处理。 以训练结果为基础,构建人体目标检测模型。 但是,该方法的检测精度不足。 Gong 等人[10]提出基于深度学习和多尺度特征融合的人体目标检测方法,该方法从SSD 网络中提取人体移动目标的多尺度特征,并通过特征融合方法,提取细节特征和敏感位置信息,从而完成目标检测。 但是,该方法存在虚警率较高的问题。
因此,本文利用无线传感人脸识别技术,进行空间弱小人体目标跟踪,通过无线传感器采集高清的人脸图像,结合人脸识别技术准确识别出弱小人体目标,提升空间弱小人体目标跟踪的性能。
1 空间弱小人体目标跟踪
1.1 无线传感人脸识别模型构建
在人脸识别领域中,应用较多的人脸特征表示方法是小波插值方法,小波插值方法是通过提取二维人脸图片的特征点,并在人脸图像中添加插值点信息,从而提高识别模型的真实性。 但是,该方法插值点需要计算,才能得到可靠的提取结果,否则跟踪区域的重叠率将会增大。 而在此次研究中采用双向稀疏表示方法可以很好地解决这一问题。
在无线传感人脸识别技术中,以无线传感器采集到的人脸图像数据为基础,结合人脸识别技术中的稀疏表示方法,完成无线传感人脸识别模型构建[11]。
采用无线传感器进行人脸图像采集的流程如图1 所示。
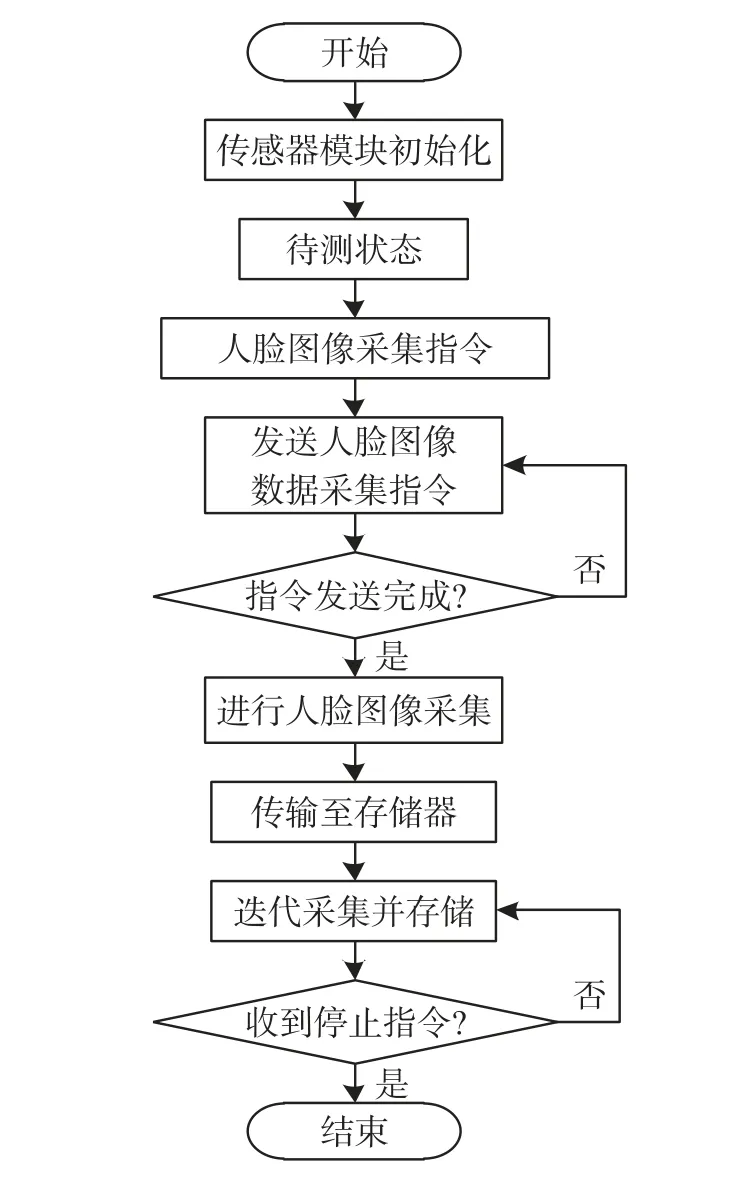
图1 无线传感器人脸图像采集流程
在稀疏表示方法中,包含正向稀疏表示与逆向稀疏表示,其中正向稀疏表示负责目标模板样本的线性重构,而逆向稀疏矩阵表示近似表示目标模板集。 通过稀疏表示方法,获得正确的双向稀疏表示稀疏矩阵,再通过优化求解得到观测似然函数,确定人脸识别模型。 稀疏表示过程如图2 所示。
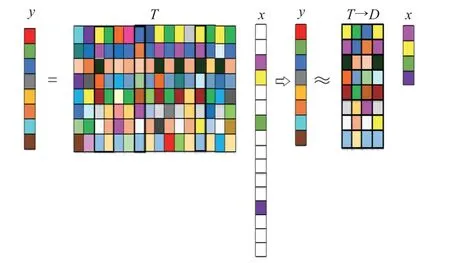
图2 稀疏表示展示图
1.1.1 正向稀疏表示

②获取L2范数,规范化矩阵C的列。
③对L1范数问题进行计算:

或采用替换运算:

④分析残差。

⑤将(y)=arg min iri(y)输出。
上述公式中,测量矩阵通过C描述,内仅有的非零元素由δi()描述。 图像数据重建问题可通过最小化L1范数确定,以获取最稀疏解xi。 通过步骤⑤,可以使单个个体类与测试样本的相似关系采用残差计算得到。
1.1.2 逆向稀疏表示
假设有n个候选样本的特征集合为Ct=[,]∈Rd×n,N=m×b,目标模板特征为ot∈Rd×N,d=384。 则目标模板可用候选样本的线性表达式为:

式中:线性系数为βt=[],其最小约束条件为:

假设已知y∈Rm×1表示输入信号,D=[d1,d2,…,dn]∈Rm×n(m≪n),求解α=[c1,c2,…,cn]的值,其中ci为对应系数,则逆稀疏等价求解方程为:

定义Y=[y1,y2,…,yk]∈Rd×k表示候选样本观测值,则利用候选样本集合构建逆稀疏模型,假设当前的目标模板为t∈Rd×1,逆稀疏模型可表示为:

式中:λneg表示逆向稀疏的惩罚因子,d表示样本个数,β为逆向稀疏表示系数。
1.1.3 双向稀疏表示
在运用双向稀疏表示过程中,需要确定唯一的一个候选样本集X,即确保稀疏参数α是唯一的。从多个候选样本中构建候选样本集的过程为:

式(8)是目标模板集D对候选样本的稀疏表示,其中设候选样本集的个数为m,式中U是目标模板集D对于候选样本集X的稀疏表示矩阵。 同样对于逆稀疏表示来说,是候选样本集X对目标模板dj的稀疏表示:

式中:V表示候选样本集X对于目标模板集D的稀疏表示矩阵。
构建双向稀疏表示目标跟踪模型:

式中:ψ为惩罚项。
1.2 正交匹配追踪法
正交匹配追踪法(Orthogonal Matching Pursuit,OMP)的主要思想为:在进行迭代时,将与现阶段冗余向量关系最密切的列,从测量矩阵φ的列向量内寻找出来,之后在测量向量中将其剔除,并开始迭代,直至迭代能够满足稀疏度,完成迭代。 该算法属于贪婪算法,在进行迭代时,尽量使被选列能够满足正交。 由于该算法这一特性,能够减少迭代次数,且能够改善残差值收敛速度。 该算法通过如下步骤计算:
运用K和φ分别表示稀疏度、测量矩阵,并将初始信号设置为x。 对索引集Λ0=∅,t=1 和重构信号=0 进行初始化。
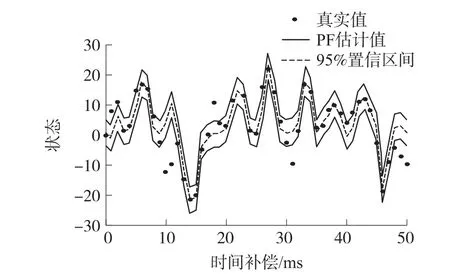
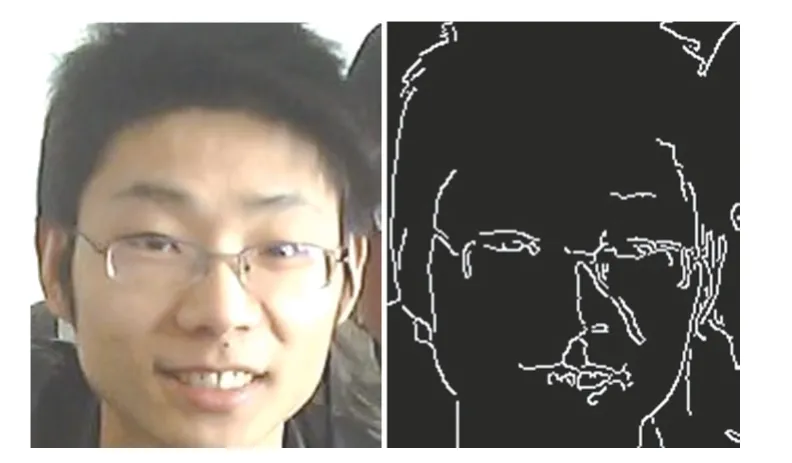
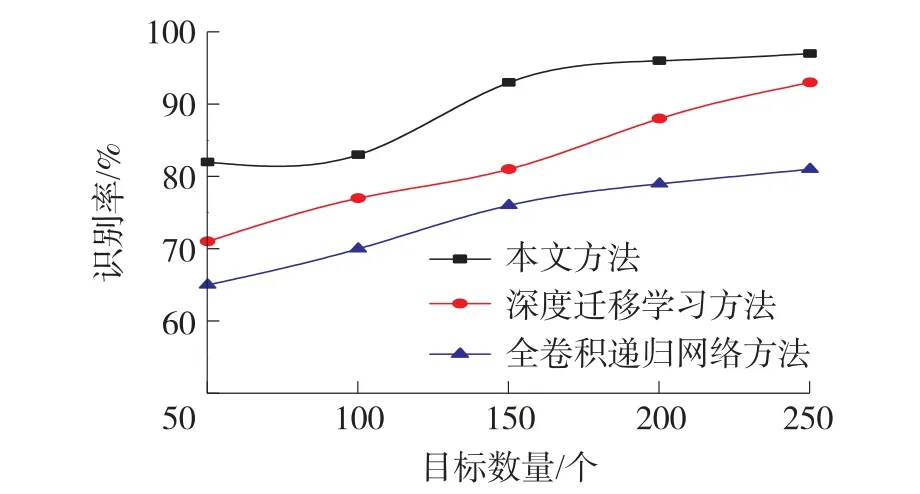
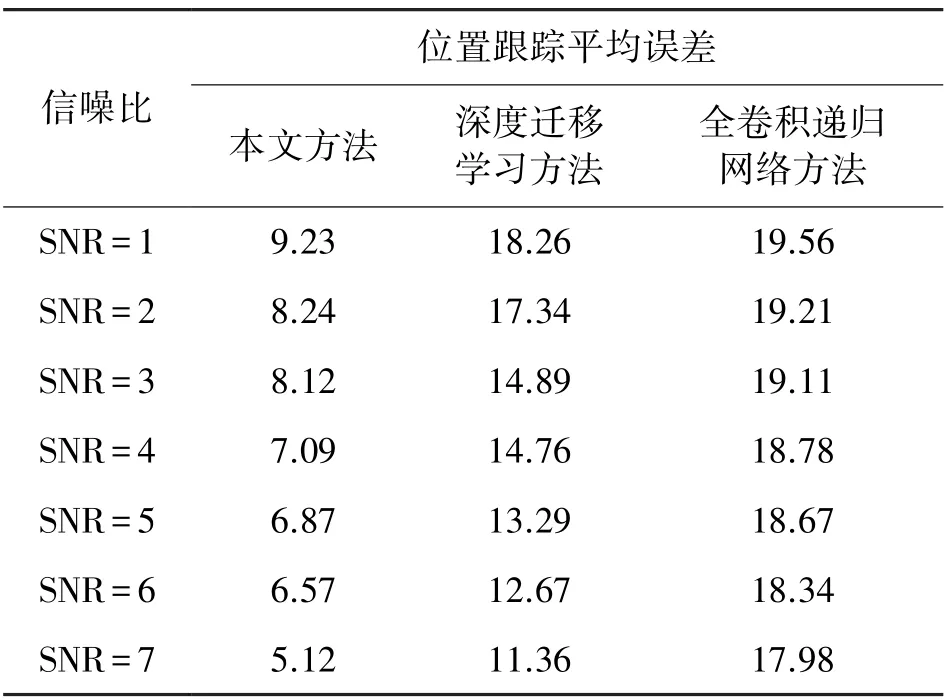
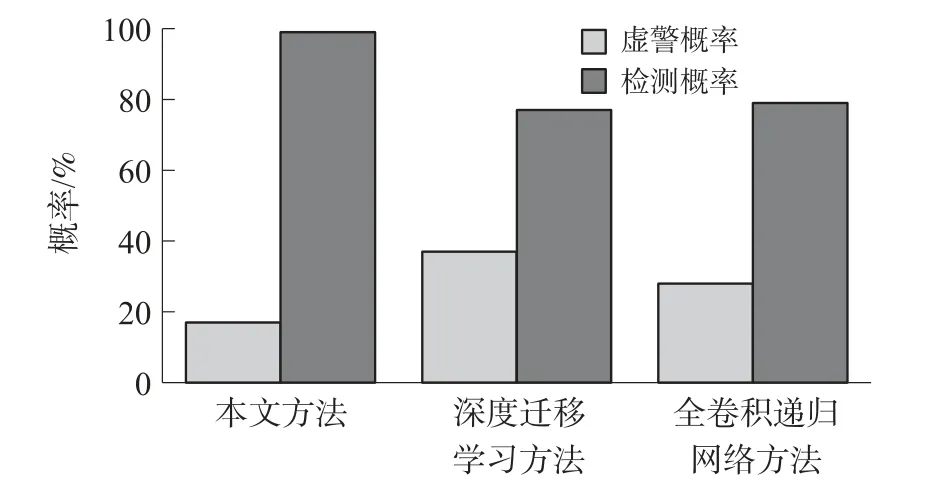
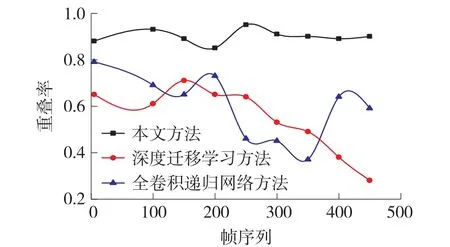
①寻找λt=| ②更新索引集Λt=Λt-1∪{λt},并将所寻找的原子集合进行记载,表示为φt=[φt-1,φλt],该子集存在于测量矩阵内。 ④对残差rt=y-φt,t=t+1 进行更新。 ⑤判定t>K能否满足,若不能,返回操作步骤①,若能满足,即迭代结束。 运行过程中,该算法具有较快的运行速度,因此,通过正交匹配追踪法,获取空间弱小人体目标人脸图像的双向稀疏表示。 粒子滤波的计算主要通过弱小空间人体目标人脸图像样本均值,改变积分的计算过程,并通过随机粒子,改变概率密度函数,以得到状态最小方差估算值[12]。 在目标信号内,通过式(11)计算人脸图像状态移动模型,通过式(12)计算观测模型,且目标在k时刻时,通过zk表示空间弱小人体目标人脸图像的观测参数,xk表示人脸图像的状态参数: 式中:h表示一个观测模型;f表示一个状态转移模型;uk-1表示目标跟踪中产生的噪声;vk表示目标观测中产生的噪声,二者不存在联系。 对于较多测量点内,且反复存在的目标,通过人脸图像进行识别与认定的过程,即为空间弱小人体目标跟踪,其过程随机变化,且不容易确定。 由于空间弱小人体目标的状态能够通过移动时刻的“动作”进行判定,即目标在移动时刻可能发生的观测几率P(zk|xk)与状态移动几率P(xk|zk-1)可由目标信号的观测模型与状态移动模型改变获得,所以,经运算后验概率P(xk|z1:k)可通过k时刻的状态估计转化得到,并且可依据贝叶斯,对递推进行更新与预测。 通过式(13)描述目标运动状态的预测形式: 即依据已停止计算的上一时刻概率密度P(xk-1|z1:k-1),对P(xk|z1:k-1)进行估计,其为目前时刻中,目标的先验概率。 因此,通过式(14)计算更新后的空间弱小人体目标运动状态: 式中:P(xk|z1:k-1)描述上一时刻的先验概率密度,z1:k为已停止计算的目前时刻观测值,通过二者,能够计算得到目前后验概率P(xk|z1:k)。 通过粒子滤波,能够获取该概率函数的近似解,即将后验概率密度采用较多具有某些规律的随机样本加权和描述的过程。 将N个粒子和与之相应的归一化权值从空间弱小人体目标运动情况的后验概率P(xk|z1:k)内选出,则可通过表示目标粒子的后验概率的分散情况,并通过式(15)计算: 式中:k时刻粒子的权值可通过式(16)计算: 式中:关键密度函数由q(·)描述,且通常情况下,关键密度函数由q()表示。 根据上述所获取的双向稀疏形式,若目标粒子pt可由随机粒子表示,则背景字典U1∈Rd×n1不能双向稀疏操作粒子,即经双向稀疏后的目标原子并不具有较大的残余能量。 所以,若背景粒子pb由p代表,那么,就不能够通过双向稀疏的形式操作p,因此,操作后的目标原子具有较高的残余能量。 残差能量能够判断目标的字典与信号的相似度。 通过式(18)计算经过目标字典U2∈Rd×n2重新构建后的粒子残差: 式中:σ2参数主要用于控制,且其为均方差。 在目标字典中,通过双向稀疏表示的粒子拥有越低的残差,则其具有更高的相对权值,若其与目标原子信号类似性越高,则具有更高几率发现待跟踪目标信号,使得跟踪轨迹估算更精准。 式中:(k-1)时刻的过完备字典由Uk-1描述;已更新的字典由Uk描述;在k时刻内,空间弱小人体目标人脸图像信号由fk描述,人脸图像信号经Uk-1双向稀疏操作后的系数由αk描述。 粒子滤波的整体实现过程为: ①粒子初始化处理:取k=0,抽取N个样本点,i=1,…,N。 ③计算权值: ④权值归一化处理: ⑤重采样处理:根据权值的归一化计算结果,复制或者舍弃部分样本,得到N个近似服从p(|z1:k)分布的样本,并且令=1/N,i=1,。 ⑦重复步骤②至步骤⑥。 为了检验粒子滤波的效果,选取100 个粒子进行验证,结果如图3 所示。 图3 粒子滤波结果 从图3 中可以看出,粒子滤波的结果都处在95%的置信区间中,因此,说明粒子滤波的效果较好。 为了提高仿真结果的准确性,采用OV5017 图像传感器采集空间弱小人体目标的人脸图像,并通过MC35i GPRS 无线通信模块传输到视景仿真软件Vega 中。 Vega 软件中弱小人体目标移动示意图如图4 所示。 图4 Vega 软件中弱小人体目标移动示意图 根据空间弱小人体目标动态情况设定图像的目标尺寸小于7×7 像素,大于2×2 像素,目标和邻域的相对灰度值满足SCRN≤15%,并依据设定情况进行仿真分析。 人脸特征识别结果如图5 所示。 图5 人脸特征识别结果 以测试集中的数据为基础,设定不同目标数量,分析本文方法的目标识别率,并选取参考文献[8]提出的全卷积递归网络方法与参考文献[9]提出的深度迁移学习方法作为对比方法。 识别率计算公式为: 式中:Sed表示识别到的目标结果,SGoal表示全部人体目标。 识别率测试结果如图6 所示。 图6 不同方法目标识别率 根据图6 所示,随着目标数量的上升,三种方法的弱小人体目标识别率逐渐上升,其中,全卷积递归网络方法始终保持最低的目标识别率,在目标数量为50 个时,识别率仅有65%,而深度迁移学习方法的目标识别率高于全卷积递归网络方法,而本文方法的目标识别率明显高于两种传统方法,当目标数量为50 个时,其目标识别率为82%,当目标数量为250 个时,本文方法的目标识别率最高,为97%,表明本文方法具有最高的目标识别率,能够有效识别小目标的特征。 分析本文方法在弱小人体目标运动情况下的跟踪能力,比较三种方法在同一速度、不同信噪比时,对目标图像中位置跟踪的误差,结果如表1 所示。 表1 不同信噪比时三种方法的位置跟踪平均误差 根据表1 可知,随着信噪比逐渐增加,三种方法的位置跟踪平均误差有所降低,其中,全卷积递归网络方法的跟踪误差要同时大于深度迁移学习方法与本文方法,而深度迁移学习方法在SNR =1 时,平均误差为18.26,本文方法误差仅为9.23。 因此,在任何信噪比下,本文方法的位置跟踪平均误差较低。 对比不同方法在目标跟踪过程中的检测概率与虚警概率,检测概率越高、虚警概率越低说明跟踪效果越好。 检测概率的计算公式为: 式中:K表示检测门限值,μ表示检测噪声均值,σ表示检测噪声方差,Q表示检测的概率密度。 虚警概率的计算公式为: 式中:λf表示错误预警次数,λtotal表示全部的预警次数。 检测概率与虚警概率的对比结果如图7 所示。 当目标不存在于跟踪区域时,则发生虚警,若目标存在于跟踪区域,则跟踪有效。 因此,根据图7 可知,三种方法的检测概率都要大于虚警概率,说明三种方法都具有较好的跟踪能力。 其中,深度迁移学习方法的检测概率最低,虚警概率最高,达到35%,全卷积递归网络方法的检测概率在80%左右,本文方法的检测概率可达到99%左右,且虚警概率最低,说明本文方法在跟踪过程中性能较为稳定。 图7 不同方法的检测概率与虚警概率 重叠率是指跟踪区域与人为标记真实目标区域之间的关系,重叠率越大,跟踪效果越好,反之越差。重叠率公式为: 式中:S1为跟踪区域,S2为人为标记真实目标区域。 三种方法的跟踪区域重叠率对比结果如图8所示。 图8 跟踪区域重叠率对比结果 观察图8 所示的目标跟踪序列结果可知,本文方法重叠率在各个视频序列中比较稳定,其重叠率大概维持在0.70~0.98 之间,故本文方法性能明显优于其他两种经典算法,其稳定性和精准性大大提高。 本文研究了基于无线传感人脸识别的空间弱小人体目标跟踪方法,有效结合SRC 算法、正交匹配追踪法(OMP)和粒子滤波算法,共同实现空间弱小人体目标跟踪,估算目标运动轨迹。 仿真结果表明,本文方法在弱小人体目标跟踪方面优势显著,可将虚警概率控制在一定范围内,最高虚警率不超过20%。 在未来研究阶段,可根据现阶段研究基础,继续对空间其他目标的跟踪与识别进行研究,扩大研究成果的应用范围。1.3 粒子滤波空间弱小人体目标跟踪









2 仿真分析




3 结论
