基于光子计数激光雷达的自适应门控抑噪及三维重建算法*
2022-06-04陈松懋苏秀琴郝伟张振扬3汪书潮3朱文华3王杰3
陈松懋 苏秀琴 郝伟† 张振扬3) 汪书潮3) 朱文华3) 王杰3)
1) (中国科学院西安光学精密机械研究所,中国科学院空间精密测量技术重点实验室,西安 710119)
2) (海洋观测与探测联合实验室(西安光机所部分),青岛海洋科学与技术试点国家实验室,青岛 266200)
3) (中国科学院大学,北京 100049)
4) (山西大学,极端光学协同创新中心,太原 030006)
光子计数激光雷达技术具有极高的探测灵敏度与时间分辨率,是极端条件下高精度目标信息获取的重要手段.由于该技术通过探测单光子级的回波能量实现对目标信息的三维重建,因此极易受噪声干扰,导致成像质量严重降低.基于高速电子门控的距离选通技术虽然可以有效抑制噪声,但存在参数设计依靠经验、目标检测区间窄等问题.本文提出一种在宽目标检测区间条件下的目标信息提取及三维重建方法,首先通过对三维回波信息的获取机理及其概率模型进行分析,获取目标信息分布范围并通过算法门控提取有效信息;再采用高效的图像重建算法进一步提升三维重建的质量,从而具有比基于纯硬件的去噪方法更强的抑噪能力.实验结果显示,在平均像素光子数仅为3.020,且信号噪声比仅为0.106 的极端条件下,本文提出的目标信息提取方法可将信号噪声比提升19.330 倍;再配合高效的图像重建算法,距离图像的重建信噪比相比于传统的互相关算法提升了33.520 dB,大幅提升了强噪声环境下高精度目标信息获取的能力.
1 引言
相比于传统的激光雷达技术,光子计数激光雷达具有单光子级灵敏度、皮秒级时间分辨率与高光子利用率等特点,因此在远距离三维成像[1]、水下光学成像[2]等极端条件下展现出了远超传统技术的成像效果,并成为了近年来光学成像领域研究的热点.该技术的成像过程如图1(a)所示,激光器发射的脉冲经由发射光路照明目标区域,非合作目标漫反射的能量则由物镜收集,再通过中继透镜与窄带滤光片耦合至单光子探测器;探测器的响应信号与激光脉冲发射信号则分别由时间相关单光子计数(time correlated single photon counting,TCSPC)模块的两个皮秒级独立计时通道记录.根据光子计数原理,通过大量累积回波信息即可恢复出离散的回波波形[3],进而求取离散波形中所蕴含的距离信息;再配合扫描振镜即可实现目标区域空间分布的信息,从而实现高精度的三维成像.最终获得的三维回波信号如图1(b)所示,每个像素均包含图1(c)中所示的离散波形,其中横轴由TCSPC离散的计时栅格构成,纵轴则表示每个栅格上的光子数.
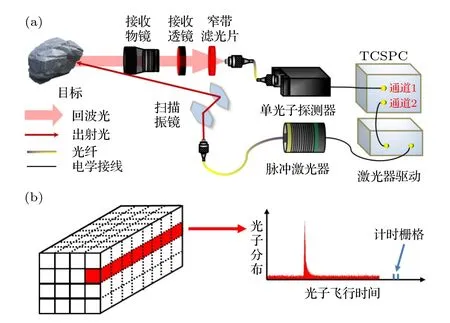
图1 光子计数激光雷达原理图 (a) 成像系统示意图;(b) 三维回波示意图Fig.1.The schematic diagram of photon counting LiDAR:(a) Description of the imaging system;(b) description of the three dimensional echo.
由于光子计数激光雷达极高的探测灵敏度在一定程度上克服了激光快速衰减特性带来的挑战,并可以通过累积的方式提高回波信号的信噪比,因此该技术成为了极端条件下光学成像的重要突破方向[4].但光子计数激光雷达技术同样面临着若干挑战,如该技术的单次回波能量一般仅为单光子量级,故极易受到环境背景光与探测器暗电流等因素的影响,导致成像系统需大量累积回波信号以改善回波的信噪比;而长时间的累积则会大大降低成像速率,使其难以满足实时化成像的需求.
为解决上述问题,2017 年Pawlikowska 等[5]将高速电子门控技术应用于单光子成像系统,通过控制探测器的开关实现距离选通,即只接收选通范围内的回波信号,从而大幅抑制了后向散射与背景光等噪声.该方法简单易行,抑噪效果良好,因此基于高速电子门控的单光子成像系统被成功应用于水下[2]、浓雾[6,7]等强衰减强散射环境,并实现了超越人眼的成像能力.但为了保证信噪比,该方法的距离选通区间通常较窄,容易造成目标信息丢失,降低了对目标的检测能力,且该方法依赖于人工选取门控的相关参数,即需大致知晓目标的位置.而未来的实际应用中目标的大致位置往往未知,故该技术在实用化方面仍有诸多限制.另一种思路则是Li 等[8]在2020 年提出的偏振去噪方法,该方法仅接收与发射光偏振态垂直的回波光子,实现噪声的抑制.该方法无需进行距离选通,但会损失较多的能量,因此需根据具体的成像条件分析该方法的适用性.
除了硬件系统级的改进,通过采用先进的信号处理方法也可以有效改善成像质量.汪书潮等[9]提出了弹性变分模态提取算法,通过对一维的回波信号进行时频分解实现信号去噪;2020 年,Halimi等[10]则基于非局部分析的思想提出了M-NR3D(multidimensional-nonlocal restoration of 3D) 算法,通过对三维回波的非局部空间联系进行分析实现了稀疏且含噪信号的三维重建;与之类似的还有Tachella 等[11]在2019 年提出的ManiPoP 算法.相比于弹性变分模态提取等一维信号处理方法,图像级重建算法功能更强大,效果相对更好,但若直接应用于目标检测区间较宽的信号则存在重建时间长等问题,故一般先由人工截取目标范围内的信号再由算法处理,使得该图像重建算法一般仅扮演后处理的角色.
经过上述分析可知,目前光子计数激光雷达技术需要同时兼顾目标检测区间宽度、信噪比及图像重建速率的要求方能满足未来实用化的需求.针对该问题,本文提出了一种基于自适应门控的光子计数激光雷达回波噪声抑制及三维重建方法,首先基于对回波中信号与噪声的统计特性分别建模以提取相关物理参数,并根据参数与统计模型自适应地感知并提取目标分布区间;再采用高效的图像重建算法对算法门控后的信号进行处理,实现高精度目标信息的快速获取.本方法不仅兼顾了信噪比、目标检测区间宽度与重建速率的要求,同时还具有良好的自适应性,可根据不同成像条件与场景智能且稳定地感知目标信息,在水下成像、远距离成像等极端环境中具有良好的应用前景.
2 目标信息感知
本文提出的自适应门控方法从回波中信号与噪声的统计特性出发,通过对二者模型进行分析与处理提取特征参数,并根据特征参数与统计模型实现阈值的初始估计;再采用本文提出的基于模型与特征参数的估计方法进一步调整阈值以确定信息提取的范围.
2.1 回波信号模型
令yi,j,t表示第i,j个像素中t时刻的回波光子数,其中i ∈[1,···,Nr] ,j ∈[1,···,Nc] ,t ∈[1,···,T],Nr,Nc,T分别表示三维回波的行数、列数与计时栅格数(见图1).根据相关文献与研究[3,10],yi,j,t具有泊松过程的特性,而根据泊松过程独立增量与平稳增量的特点可将回波建模为信号与噪声的加性混合模型,即有

其中si,j,t与bi,j,t分别表示信号与噪声在第i,j个像素中t时刻分布的期望.
根据光子计数成像机理可知,回波中所有的信号均源自短脉冲激光的照明,因此信号在回波时刻的分布上具有较好的一致性[12],且在较为理想的状态下具有近似高斯分布的形状.而噪声的来源多样,因此呈现较为随机的分布.根据上述特点可将第i,j个像素中噪声的期望bi,j建模为均匀分布,再将目标反射率ri,j与距离信息ti,j纳入信号分布模型si,j,即有:

其中λ是一个 1×T且元素均为λ的向量,f表示成像系统的响应函数,一般可在对平板等特殊目标的标定过程中获取.由于f是通过TCSPC 记录,因此是若干计时栅格组成的离散波形.目前单光子雪崩二极管(single-photon avalanche diode,SPAD)因易于集成、可在室温下工作等良好特性成为了主流的单光子探测器,其中SPAD 探测器的载流子在耗尽层中所产生的时间响应符合高斯分布的特性.然而,若光子在产生载流子之前先到达了探测器的中性区,则载流子会因为在耗尽层中的扩散产生具有指数分布特性的畸变,导致高斯分布模型无法准确描述f的波形[13,14].为了平衡模型描述的精确性与简洁性,本文将f建模为双指数分布模型,也称为拉普拉斯分布模型[15,16],即有:

其中 |·| 表示绝对值,α和β分别表示双指数分布的位置参数与尺度参数.
2.2 特征参数获取
通过对大量实际场景中目标的分布规律进行归纳分析,可假设
1)在图像获取过程中目标在距离上的分布较为集中;
2)成像过程中成像环境并未发生剧烈变化;
3)扫描光斑的尺寸远小于目标尺寸且每个像素的回波均为单峰信号.
在上述条件成立的情况下可以通过增加空间采样的方式来弥补时间采样的不足,即可以通过对三维回波信号在空间域(以下简称空域)求和以实现与时间累积后类似的效果.如图2(a)所示,首先对三维回波直方图中的N个像素(N=Nr×Nc)的回波在空域进行求和,即可得到一个 1×T的分布不包含空间分布信息,但包含着较为丰富的距离信息,故只需对进行深入分析(如图2(b)所示)即可得到目标分布的大致范围.
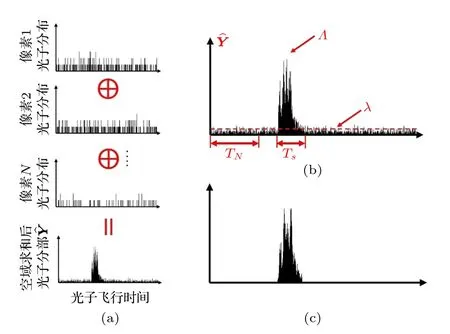
图2 自适应信息提取过程示意图 (a) 空域求和示意图,其中 ⊕ 表示求和;(b) 特 征参数示意图;(c) 目标信息的分布范围Fig.2.The schematic diagram of adaptive information extracting:(a) Schematic diagram of the summing process on the spatial domain,where ⊕ stands for summing operation;(b) description of the feature parameters;(c) the distribution interval of the target.
本方法所需的主要特征参数如下:
1) 成像系统响应函数f中峰值的一半对应的宽度(已转化为计时栅格数)γ.γ主要由发射激光的半高全宽(full width half maximum,FWHM)以及TCSPC 的计时精度(计时栅格的宽度)决定,代表信号模型中的特有属性,具体则由f峰值的一半在横轴的投影宽度得出.本文主要针对窄脉冲激光建模,对于γ较大的情况,则通过γ=log10(γ)」对脉宽进行修正,其中Γ表示作为参考的短脉冲的脉宽,则代表向下取整操作.上述两个参数与(3)式中的尺度参数β相关.
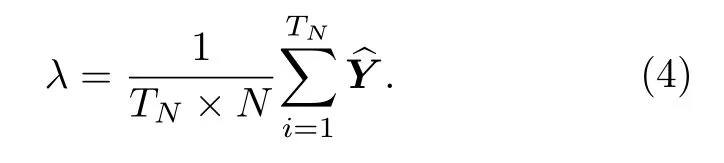
2)噪声估计区间TN与噪声的期望λ.由于噪声具有均匀分布的特性,且在实际环境中目标与成像系统存在一定的距离,故可如(4)式所示,截取中前TN个元素用于估计噪声的期望λ.TN的选取与目标场景极为相关,一方面可根据系统设计参数或任务要求(如测量范围)给出合适的值,或可在系统标定校正的时候根据已知场景的强先验信息给出.
4)平均像素光子数(photon per pixel,PPP)与信号噪声比(signal to background ratio,SBR).根据(5)式与(1)式可知,PPP 统计回波中信号光子的个数,代表了回波的稀疏程度;而SBR 则通过比例估计了信号与噪声的差异水平,象征着回波的信噪比.

上述特征参数均具有一定的数学或物理意义,因此可以根据系统参数设定或根据回波数据自主获取,为自适应信息提取奠定了良好的基础.
2.3 自适应信息提取
本节基于2.1 节中建立的模型与2.2 节设定的参数提出了基于自适应门控的噪声抑制(adaptive gating based noise reduction,AGNR)算法,通过算法门控的方式自适应地提取目标信息的分布区间.一般情况下,获取目标信息分布区间的主要瓶颈是强噪声干扰,因此AGNR 方法从噪声水平估计与信号模型两方面入手估计初始门控阈值θ,即有

式中λ×N表示对的每个计时栅格中噪声期望的估计.根据(1)式与(2)式,可认为纵轴中[λ×N,Λ] 区 间才是信号的分布范围,且中信号分布的包络仍具有双指数分布的性质,即有项;但相比于(3)式,尺度参数β由参数γ替代;位置参数则根据信噪比确定,即采用了 SBR 代替了 |t−α|.(6)式在(3)式的基础上进一步考虑了特征参数及物理意义,优化了θ的初始估计.
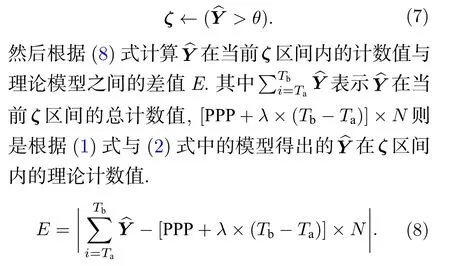
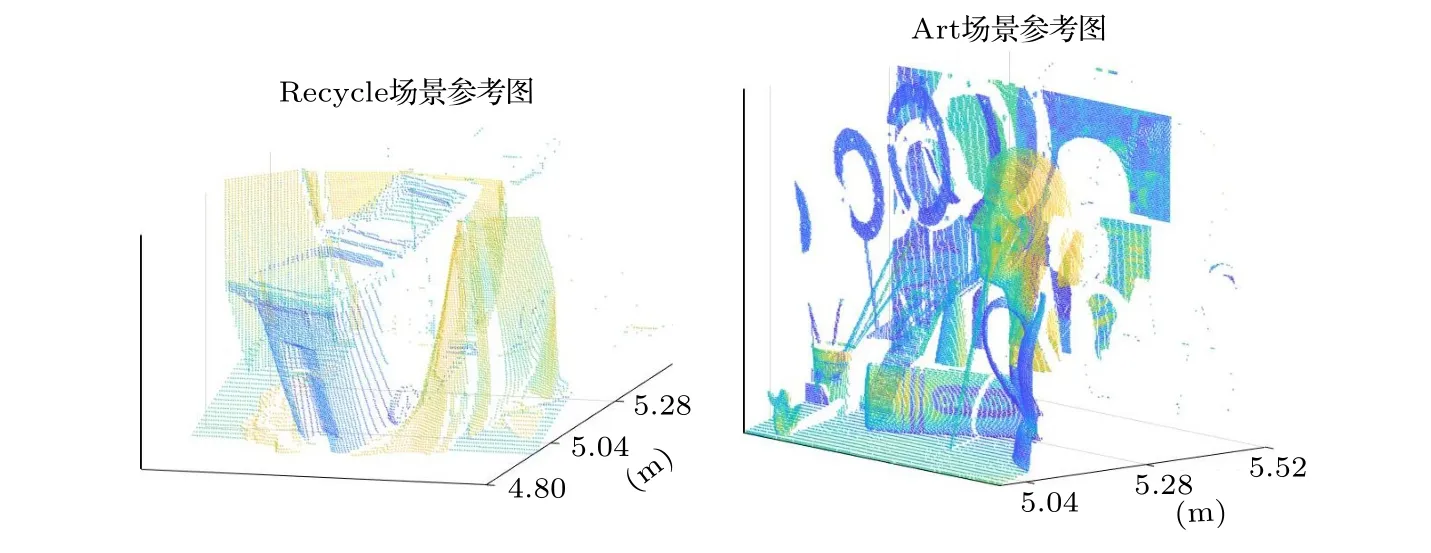
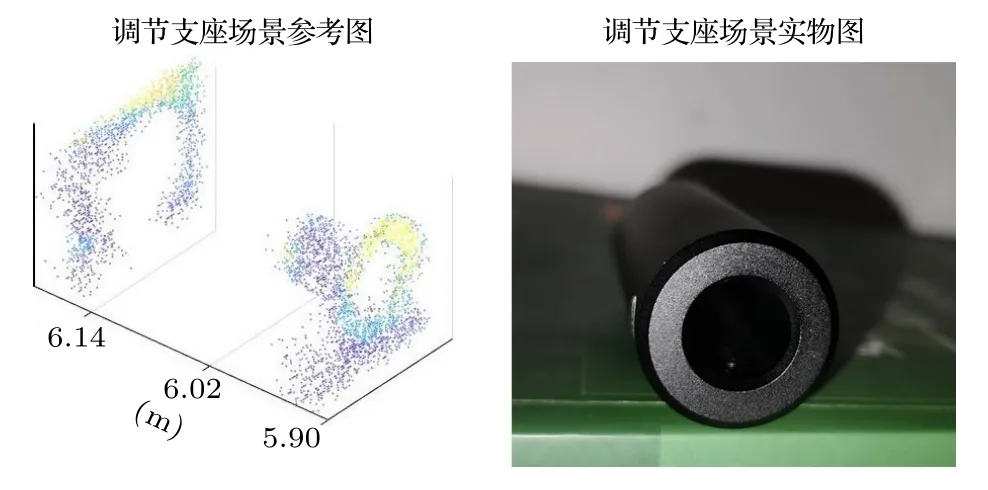
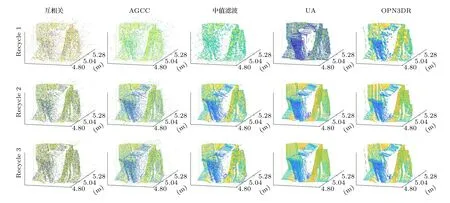
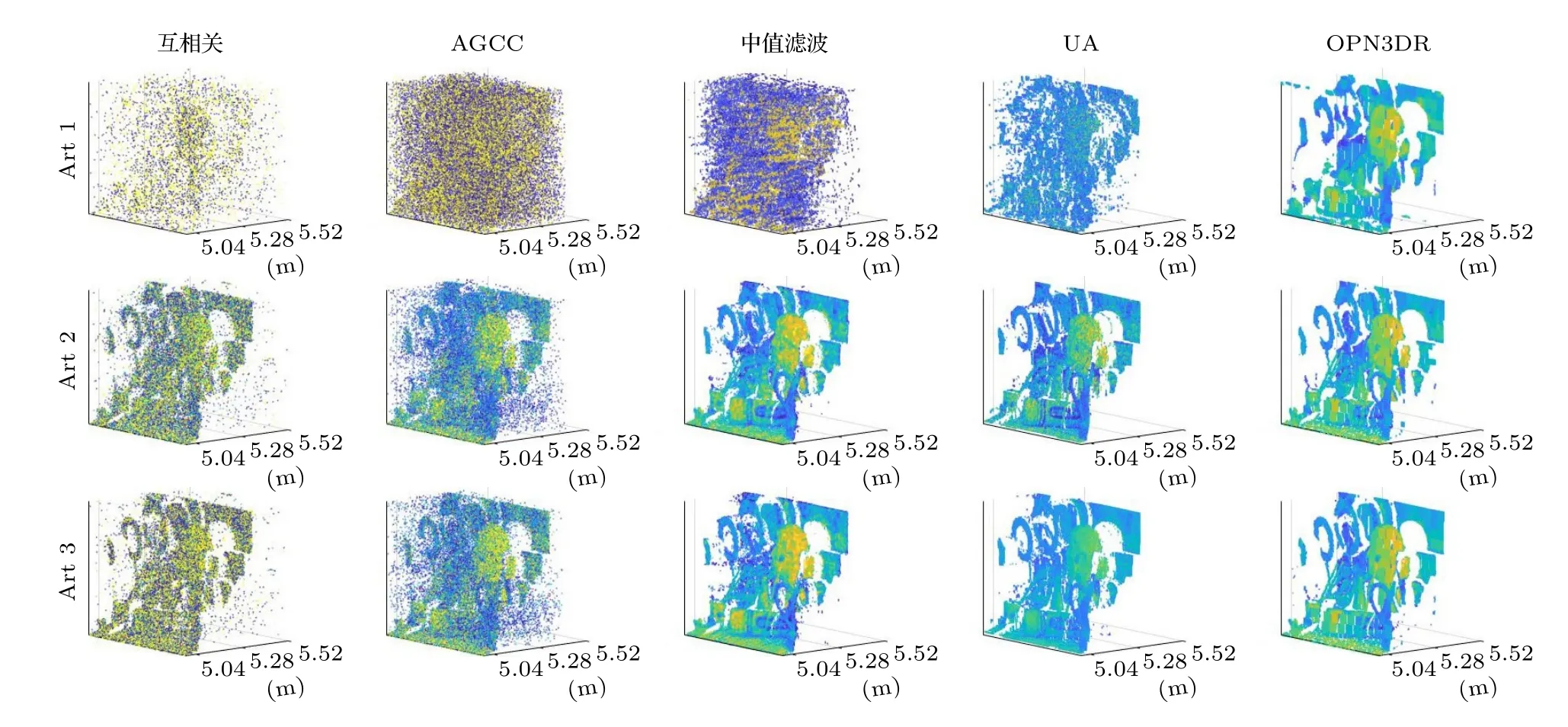
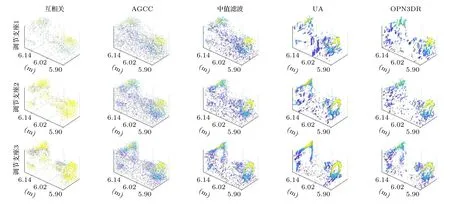
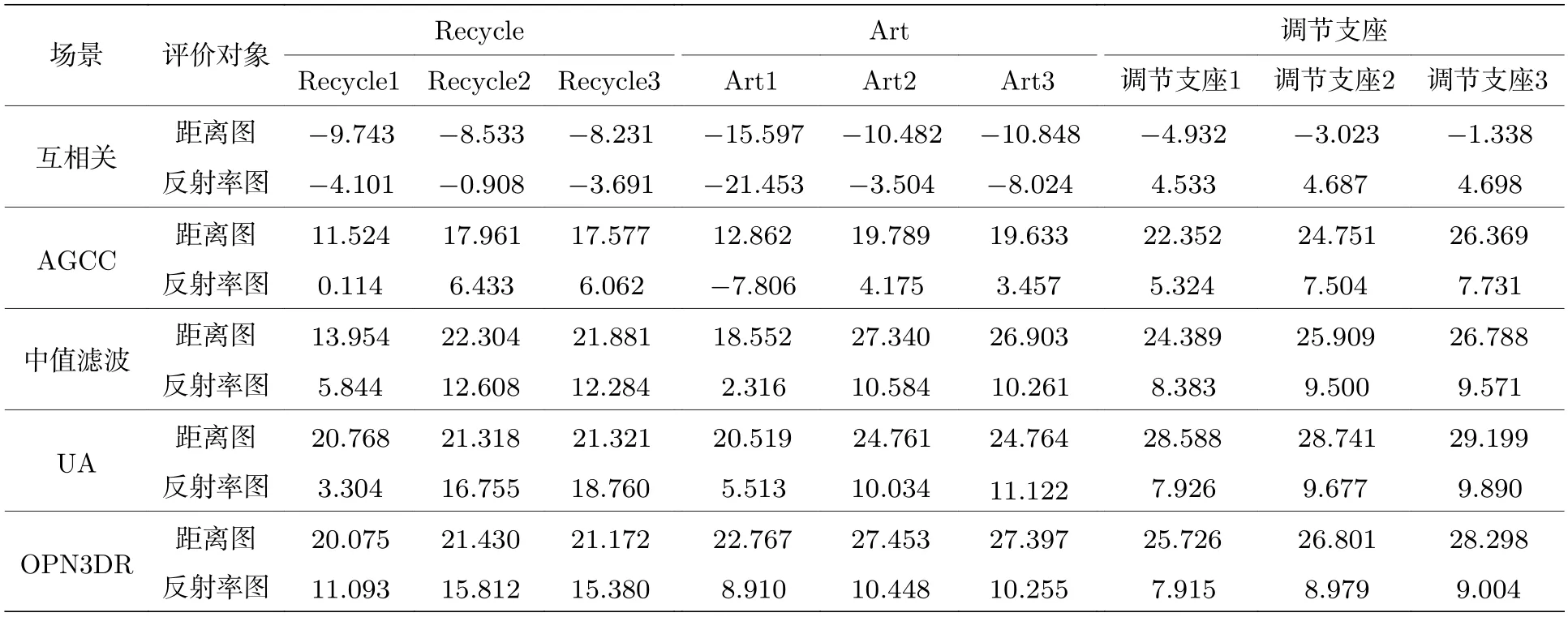
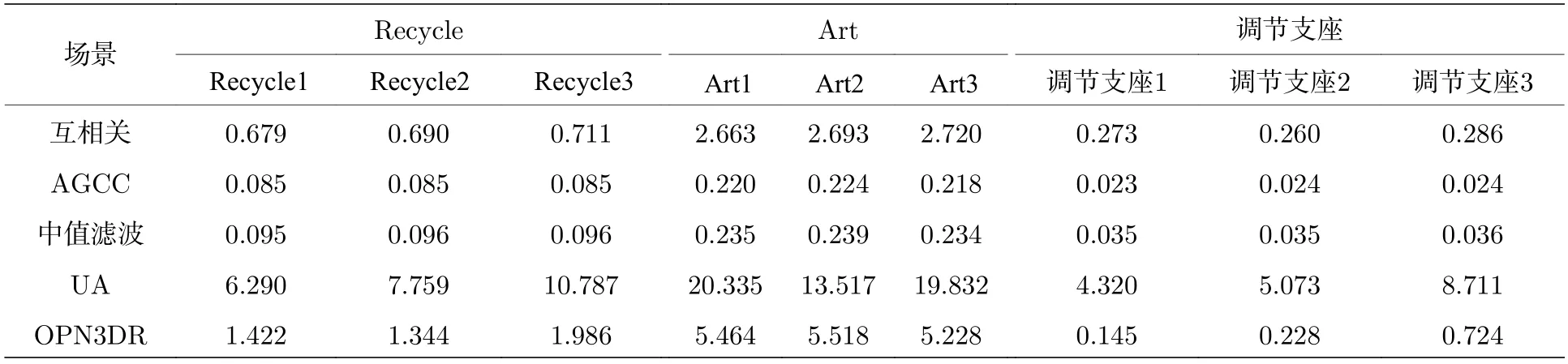
(10)式与高斯分布“ 3σ”法则的形式相近,但积分值为 95% 而非 99.7%.因此本文定义f中(α+3β,α−3β) 区域的宽度为σ,并令ζ={[ζ−σ]∪[ζ+σ},从而以较小的代价增强了信号检测的能力,(10)式中参数的选取参见(6)式.AGNR 算法的流程见算法1,其中第8 行表示θ1与θ2的获取过程;第10 行表示若E1 本文提出的AGNR 算法从理论模型出发,在得到门控阈值的初始估计后计算理论计数值与实际计数值的差值,并巧妙地将光子数的差值转化为对信息提取区间的估计,进而通过迭代逐步确定信息提取区间.最后,根据2.2 节的假设1),本方法滤除了当前信息提取区间内不连续的点和区间以进一步加强抑噪能力,并对区间进行了延拓以加强目标检测的能力.AGNR 算法实现了与高速电子门控相似的效果,但无需人工预设目标检测范围,而是根据数学模型与物理参数自适应地对目标分布区间进行感知与截取,实现了高效且智能的噪声抑制. 在强衰减、强噪声等极端的成像环境中,第2 节中介绍的AGNR 算法虽然可以大幅提升信噪比,但由于传统的图像重建算法难以克服稀疏与含噪信号重建的问题,因此即使在AGNR 算法的基础上仍然难以达到较为满意的成像结果.本文在AGNR 算法的基础上引入了新型图像重建算法,通过对回波信号的高效利用进一步提升成像质量,并通过实验对比分析各算法的性能. 1)互相关算法[17].该方法也称匹配滤波法,是一种逐点重建算法,也是传统重建算法的典型代表.令为标定过程中得到的参考信号,yi,j为第(i,j) 个像素的回波,则互相关的结果Ci,j可由(11)式获得,其中⊗表示相关操作. Ci,j中峰值在横轴上的投影即是该像素的距离ti,j;反射率ri,j的估计则由(11)式得出.对所有像素遍历上述过程即可获取目标的三维信息. 2)基于自适应门控的互相关(adaptive gating based cross correlation,AGCC)算法.该方法仅对区间ζ内的数据进行处理,即在AGNR 算法的基础上应用互相关算法.通过与原始的互相关算法对比即可分析AGNR 算法对于重建性能的提升.由于AGNR 算法已经对噪声水平λ进行了估计,ri,j的估计改由(12)式得出.对于ri,j <0 的像素,均令ri,j=0 以消除无物理意义的反射率值. 与此同时,表5显示,不同区间范围内各明细费用对该院费用结构变动的贡献率是不同的。从总体来看,2012~2016年间引起住院费用结构变动的项目主要有药品费、手术费、化验费、检查费四大项,四者累积贡献率达69.10%,其中药品费的结构变动贡献率高达35.73%,是在各年度中变动最活跃的项目;治疗费贡献率逐年下降,年均减少率为3.74%。具体而言,与2014~2015年相比,2015~2016年间诊疗费、手术费、护理费、药品费四项的结构变动贡献率均有较大幅度增加;床位费、检查费、化验费、治疗费四项的结构变动贡献率呈下降趋势。 3)中值滤波算法.中值滤波是一种典型的图像去噪算法,本文将其应用于AGCC 算法得到的距离图t与反射率图r中,通过图像处理的手段提升重建质量. 4)解混合算法(unmixing algorithm,UA)[12].该方法被认为是光子计数成像领域中效果最好的图像重建算法之一.该算法首先通过对三维回波进行降采样以实现对回波中噪声信号的抑制,再通过总变分(total variation,TV)正则化方法构建目标函数并求解实现目标信息的三维重建,同时该算法良好的结构也使其具有了并行运算的优点. 5)基于优化的非局部三维重建(optimization based bon-local 3D restoration,OPN3DR)算法[18].该方法通过对回波进行不同尺度的三维低通滤波并融合不同尺度下的信息实现高信噪比的初始估计,再通过非局部重建的思想分析像素间的相关性,并基于此进一步优化成像结果.除此之外,还提出了非均匀采样算法以降低计算量,从而实现了目标高精度信息的快速获取,是本领域最新的算法之一.为平衡重建的速率与质量,本文对该方法进行了简化,仅采用最大尺度进行滤波并得到初始估计,在牺牲少量成像质量的前提下适当加快了重建速率. 为测试本文提出的AGNR 算法的性能,同时分析对比不同重建算法在AGNR 算法的基础上对成像性能的提升,根据仿真数据与实测数据分别对上述方法展开验证与分析. 本文基于(1)式与(2)式获取仿真的回波数据,(2)式中的距离信息t由Middlebury 公开数据集[19,20]中的场景给定,反射率信息r则在原有场景信息的基础上进行调节以模拟不同的衰减条件与累积时间,λ可人为设定以模拟不同噪声强度下的回波[21].本文选用了数据集中的Recycle 场景与Art 场景,尺寸Nr×Nc×T分别为96×144×4096与 2 24×256×4096 以仿真较大的目标检测区间,并参照4.2 节中所述的系统设置物理参数(如计时栅格的宽度设为16 ps).Recycle 场景与Art 场景的参考图见图3,其中仅给出了包含目标信息的部分以凸显目标的细节信息,本文其他章节中的结果也均用该方式展示.为了研究本方法在不同条件下的噪声抑制能力,Recycle 场景与Art 场景各仿真了3 组回波,其PPP 与SBR 均不相同,具体回波参数见表1. 表1 不同场景下AGNR 算法的抑噪性能对比Table 1.The noise reduction performance of AGNR algorithm under different scenarios. 图3 仿真场景参考图.左图为Recycle 场景参考图,右图为Art 场景参考图Fig.3.The reference image of the simulation scene.The reference image of Recycle scene and Art scene is shown in left and right respectively. 用于数据采集的成像系统原理见图1,该系统的主要器件型号与参数如下:激光器选用Pico-Quant LDH-D-C-850 型激光器,波段为850 nm,重频10 MHz,经扫描镜发射的激光功率约为100 µW;TCSPC 的型号为PicoQuant PicoHarp 300,实验所用的计时栅格宽度为16 ps.探测器为型号EXCELITAS DTS SPCM-AQRH-16-FC 的SPAD,量子效率可达40%@850 nm,暗计数率<20 cps.接收物镜型号为KOWA LM25 HC,接收口径约17.8 mm;带通滤波片型号为Semrock FF01-850,带宽为 ± 10 nm.如图4 中右图所示,实验目标为光学系统中常用的调节支座的底部,其外侧为圆环状平面而中心为螺纹孔凹陷,背后则有平板.该场景的参考图如图4 中左图所示,参考图数据采集于2021 年6 月的夜间,单像素的累积时长为0.5 s,图像尺寸为 6 4×64×4096.图4 的左图仅截取了包含目标信息的部分,由互相关算法直接重建.为营造可控的实验环境,成像目标与系统均置于遮光布组成的暗室内,因此噪声水平较低.且在探测器前添加了衰减片以防止探测器被击穿,参考图所用衰减片为Thorlab NE10 B-B,实测结果衰减至原信号的16.1%. 图4 实测场景参考图及实物图.左图为调节支座场景参考图,右图为调节支座场景实物图Fig.4.The reference image and the physical map of the measured scene (i.e.supporting rod scene).The left image is the reference image of the supporting rod scene,and the right image is the physical map of the supporting rod scene. 实验数据仍由上述系统采集,累积时间同样为0.5 s,但采集于2021 年6 月的白天,且暗室中一侧的遮挡已去除,因此噪声水平明显高于参考图像的采集条件.根据测量结果,暗室内背景光的功率在850 nm 约为1 µW,而发射功率仍为100 µW,经漫反射后回波功率已远低于背景光的功率.考虑到背景光功率已明显提升,该实验在NE10B-B 的基础上增加了NE30B-B 以保护探测器,组合后实测结果衰减至原信号的0.25%,因此回波相较参考图也更加稀疏.根据TCSPC 的工作机理,不同累积时间下的回波数据可通过相应软件从原始数据中提取[3].本文提取了累积时间为5,50 与250 ms的回波数据用于测试,其PPP 与SBR 见表1,其中“调节支座1”、“调节支座2”、“调节支座3”分别对应累积时间为5,50 与250 ms 的回波数据.为方便描述,下文中“调节支座”即对应真实场景图. 4.3.1 AGNR 算法抑噪性能分析 不同实验场景的PPP 与SBR 如表1 所列,令SBR′表示经过自适应信息提取后的SBR,并定义噪声抑制比(noise reduction ratio,NRR)为SBR′与SBR 的比值以衡量噪声的抑制水平,即有 根据表1 可知,同一场景中NRR 差异较小而不同场景间NRR 差异较大,这主要是因为不同场景之间目标的分布情况差异较大,导致不同场景下区间ζ的宽度Td不同,进而造成了NRR 较大的差异,该结果体现了AGNR 算法对于不同场景的自适应性.但在同一场景中,无论在何种条件下,NRR 均较高且有相近的数值则表明AGNR 算法均能够稳定地感知并提取目标分布区域的信息.特别是在PPP<1 且SBR<1 的场景(如Recycle1与Art1)中NRR 均可达到较高的值说明该方法具有极端条件下的噪声抑制能力,取得了与硬件门控相当的效果. 4.3.2 图像重建算法性能分析 图5 与图6 分别给出了第3 节中所述的5 种算法在仿真环境下的重建结果.由于互相关算法直接对含噪的原始回波做处理,且该算法抗噪能力较弱,因此成像效果最差,特别是在回波稀疏且噪声较强的条件下(如Recycle1 与Art1).AGCC 算法对于噪声具有一定的抑制效果,例如Recycle1 与Recycle2 中部分受噪声干扰而不在目标分布范围内的像素的信息均得到了更优的估计,并且反射率图(即图中的颜色)的视觉效果也有了一定的提升;但Art1 场景则显示在极稀疏且噪声极强的情况下仅依靠AGCC 算法已不足以完成高质量的重建.中值滤波由于是在AGCC 算法的基础上进行处理,因此能够适当提升成像质量,尤其对于Art2与Art3 场景具有较为明显的效果,但对于极端条件下的重建(如Recycle1 与Art1)仍然难以达到令人满意的结果.UA 算法相比于前三种方法具有较大的提升,该方法对于所有的场景均能稳定地重建出目标的主要信息,彰显了其强大的重建能力;但在Recycle1 与Art1 场景中对于反射率的估计偏差相对较大.OPN3DR 算法的效果与UA 类似,对于所有场景的距离信息与反射率信息均有较好的重建能力,但由于该算法对图像进行了非均匀降采样,因此图像存在一定程度的块效应. 图5 Recycle 场景重建结果对比图Fig.5.The comparison of the restoration result of different algorithms under Recycle scene. 图6 Art 场景重建结果对比图Fig.6.The comparison of the restoration result of different algorithms under Art scene. 类似地,图7 给出了上述方法在实测数据上的结果.在三组数据中,互相关算法几乎无法重建出目标信息,而AGCC 算法虽然有所改善但目标信息仍不够明晰;中值滤波方法仅在“调节支座3”场景下才能得到较为明显的目标轮廓.UA 与OPN3DR算法明显优于前三种方法,在“调节支座2”与“调节支座3”场景中可以获取较好的目标轮廓,但“调节支座1”的重建结果还不够理想,这主要是因为图像尺寸较小,在极端条件下可供分析的数据相对较少. 为了客观地评价图5—图7 中的结果,定义重建信噪比(rconstruction signal-to-noise ratio,SNR)[5]如下: 图7 调节支座场景重建结果对比图Fig.7.The comparison of the result of different algorithms under supporting rod scene. 式中 ||·||2表示2-范数,X与分别表示参考图像与重建图像,RSNR 的单位为dB. 表2 列出了所有测试场景中距离图与反射率图的RSNR.相比于互相关算法,AGCC 算法在所有场景中,对距离图与反射率图的RSNR 均有较大的提升,这也体现了表1 中所展示的对SBR 的提升效果.中值滤波的结果也均优于AGCC 算法,且在一些信噪比较高的场景中得到了相对最优的结果,说明了该方法具备一定的抑噪能力,但在极稀疏与极低信噪比的条件下去噪效果不及UA 与OPN3DR.UA 和OPN3DR 算法对于所有场景均能得到较好的RSNR,但二者都存在一定程度的降采样过程,因此在部分情况下未能得到最高的RSNR.其中UA 在实测数据中均得到了最好的结果,而OPN3DR 算法在Art 场景的距离估计中均获得了最好的结果,说明UA 在小尺寸图像的处理方面具有较大的优势,而OPN3DR 算法能够更加充分地发掘大尺寸图像中的信息.UA 算法与OPN-3DR 算法均是在AGNR 算法的基础上进行处理,通过与AGCC 的对比可以看出两个算法均优于互相关算法,而通过AGCC 与互相关算法的结果对比则可得到AGNR 算法所起到的关键作用. 表2 不同重建算法在不同场景下RSNR 对比(单位:dB)Table 2.The RSNR of different reconstruction algorithms under different scenarios (in dB). 上述算法的运行时间由表3 列出,测试所用计算机的CPU 为i9-10900X,内存为32 G.由于原始回波尺寸较大,因此互相关算法耗时相对较长;而AGCC 算法由于自身具有结构简单、易于计算的特点,且仅处理有目标信息分布的区域,因此所用时间约为互相关算法的10%,充分体现了本方法的优越性.中值滤波方法所用时间为AGCC 算法耗时与中值滤波算法本身耗时之和,因此略高于AGCC 算法的耗时,但所消耗的时间也远低于互相关方法所用时间.OPN3DR 算法为了提升成像性能,对回波进行了分析与利用,因此相较于前三者耗时较多,但对于尺寸较小的图像,其时间成本尚可接受.UA 算法虽然采用了并行计算的方式,但计算复杂度相对较高,因此即使在高性能计算机上也难以实现快速重建的目标.由于OPN3DR 与UA 的结果也是基于AGNR 算法后的信号得到的,因此耗时也是其本身的运行时间与AGNR 算法运行时间之和.而AGCC 算法的时间消耗主要集中于AGNR 算法部分,二者在数值上差异很小,因此本文统一采用AGNR 算法的耗时作为AGCC算法的耗时. 表3 不同重建算法的运行时间(单位:秒)Table 3.The processing time of different reconstruction algorithms (in seconds). 综上所述,本文提出的AGNR 算法可以大幅抑制回波中的噪声,取得了与硬件门控类似的抑噪效果,是高质量重建目标信息的关键步骤之一.同时该方法还对后续的处理起到了加速的作用.另一方面,图像重建算法对于图像质量的提高也起到了较大的作用,其中中值滤波方法抑噪能力有限,适合信噪比相对较高的情况;UA 性能良好但对计算资源要求高,重建速度慢;OPN3DR 相对平衡了重建质量与速率,综合性能相对最好. 为说明本文采用最大尺度进行滤波得到初始估计的合理性,表4 基于RSNR 和运行时间展示了滤波方式与成像性能对比.通过分析可知采用多尺度滤波可以得到更高质量的距离图,但由于本文的数据均包含强噪声,因此在融合不同层级的反射率图时容易引入噪声,导致了反射率图质量的下降.另一方面,由于多尺度滤波涉及多次滤波计算,因此耗时相对较长.综合来看,多尺度滤波虽然提升了距离图像的RSNR,但反射率图像的RSNR下降更多,且耗时相对更长;而“调节支座3”场景中二者的综合性能相似,考虑到本文主要针对极端条件的成像能力,因此选择最大尺度滤波的综合性能更好. 表4 滤波方式与成像性能对比Table 4.The comparison of the performance and the way of filtering. 本文针对光子计数成像技术面临的强噪声干扰问题提出了AGNR 算法,该算法可自适应地从回波中感知并提取目标信息分布的区域,从而在大幅提升信噪比的同时保证了较大的目标检测区间.此外还对图像重建算法进行了对比分析,其中UA算法与OPN3DR 算法因其充分考虑了图像的空间联系,因此对于强衰减强噪声环境下的重建问题取得了最好的结果.实验结果表明,在PPP 仅为3.020,SBR 仅为0.106 的条件下,经过AGNR 算法的处理,SBR 相较于原始回波提升了19.330 倍;距离图的RSNR 相比于互相关算法提升了27.284 dB,在自适应信息提取的基础上采用OPN3DR 算法与UA 算法后可比互相关算法提升30.658 和33.520 dB.说明在极稀疏且信噪比极低的条件下,本文提出的AGNR 算法是获取目标高质量三维信息的关键步骤,高效的图像重建算法可在对目标信息分布区间估计的基础上进一步利用图像的空间联系提升重建质量. 本文提出的AGNR 算法不仅兼顾了成像系统的目标检测能力与噪声抑制能力,根据成像机理与数学模型实现了对目标信息的自适应感知,还具备计算成本低、运行时间短的特点.因此在未来的实际场景中可与成像系统进行深度融合,在成像过程中实时更新特征参数,以较低的计算成本与时间代价实现对目标分布区间的感知,从而避免人工预设目标检测范围,并为后续的图像重建算法提供有效的先验信息,推动光子计数激光雷达在复杂环境成像领域的实用化. 感谢中国科学院西安光学精密机械研究所王凯迪博士的讨论.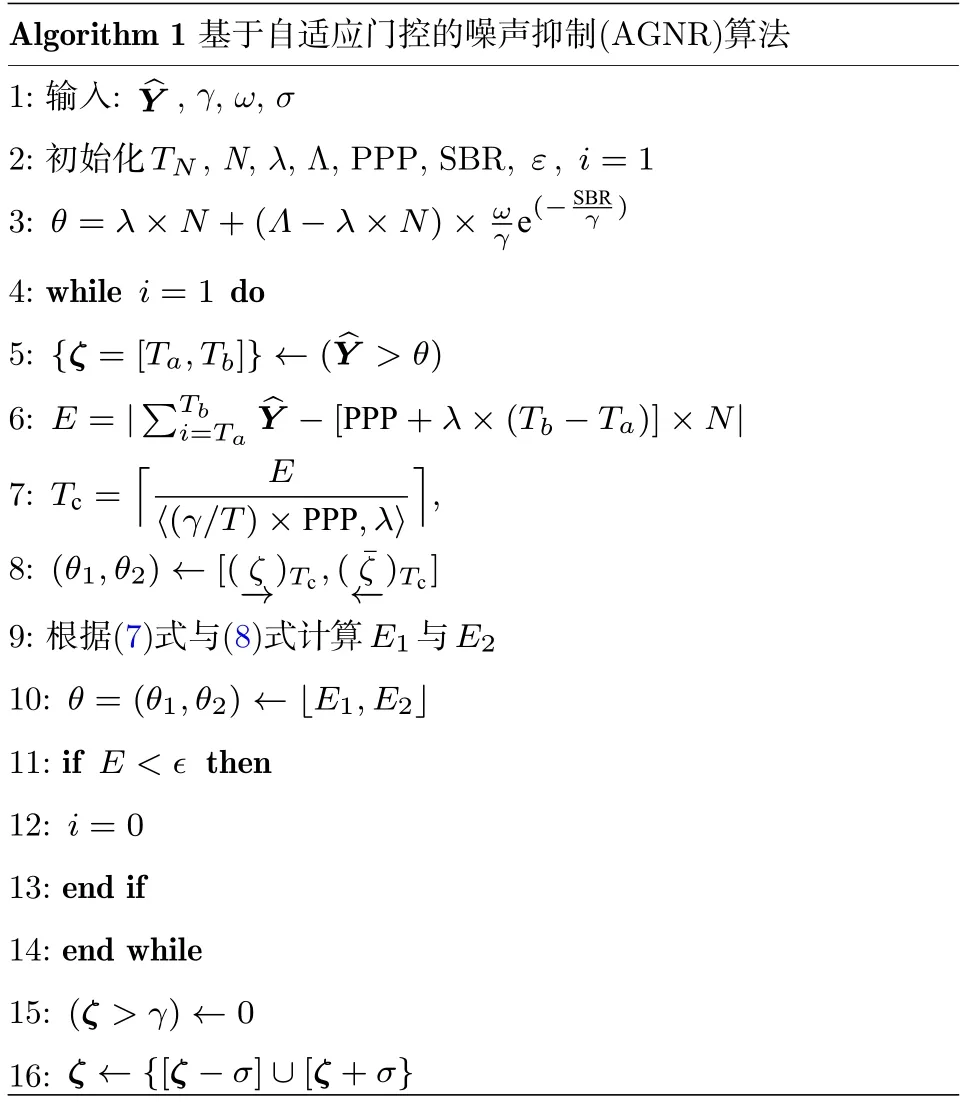
3 图像重建算法
4 实验结果与分析
4.1 仿真实验环境

4.2 实测数据获取
4.3 实验结果分析



5 结论
