基于线电压误差标准化的三电平APF 开路故障诊断方法
2022-06-03汪玉凤钱豪豪
汪玉凤,钱豪豪
(辽宁工程技术大学电气与控制工程学院,葫芦岛 125105)
有源电力滤波器APF(active power filter)能够动态补偿电网谐波电流,改善电网电流波形[1]。绝缘栅双极型晶体管IGBT(insulated gate bipolar transistor)作为APF 的功率开关器件发生故障,如不采取必要的措施,则APF 不仅不能改善电网电能质量,反而成为一个谐波源,导致电能质量进一步下降[2]。半导体开关器件的短路、开路故障是APF 运行中最常见的故障类型。开路故障往往会因为系统不必立刻停机,可能引发其他故障而导致系统出现不可修复的故障[3-4]。
针对IGBT 开路故障,国内外学者已经做了大量研究,也提出了许多检测方法。文献[5-6]利用电流Park 矢量相角的导数以及三相电流的极性,获得1 个故障检测变量和6 个故障定位变量来进行故障诊断,但APF 中谐波电流会使该种方法产生误判;文献[7]针对逆变器中的IGBT 开路故障,提出了通过检测各相电流正、负半波部分对应的功率及流向对逆变器中的IGBT 开路故障进行诊断,但是APF 输出电流中含有大量的谐波,该方法中电压、电流不再具有文中所述功率关系,即该方法不适用于APF 系统的IGBT 开路故障诊断;文献[8]应用开关函数的双傅里叶变换技术分析直流侧电流频谱,通过分析直流侧是否包含调制信号及二次谐波成分来实现逆变器单管开路故障,但由于APF系统在正常情况下,直流侧电流频谱也包含调制信号及二次谐波成分,从而导致误诊断;文献[9]利用混合逻辑动态模型估计网侧电流,生成残差,采用特定信号注入下的残差变化率进行诊断,但是对于单相三电平NPC(neutral-point-clalmped)整流器,混合逻辑运算需要115 次,对于三相三电平来说,则需要更多的运算次数,诊断较为复杂;文献[10-12]针对APF 系统,提出采用小波分解,提取系统输出电流信号的故障特征,采用智能算法进行故障特征识别来进行故障诊断,这种方法需要提取较多的故障特征,相对复杂,实现起来较为困难;文献[13]采用专家系统来进行IGBT 开路故障诊断,建立故障知识库,通过查询知识库即可进行故障诊断,但是完备故障知识库的建立较为困难。
上述文献所提出的基于电流的故障诊断方法均未考虑系统中含有大量谐波成分时故障诊断算法的有效性,因此应用到APF 系统中可能导致误诊断,甚至无法进行故障诊断。为解决三电平APF系统中的IGBT 开路故障诊断问题,本文提出一种基于线电压误差标准化的故障诊断与定位方法。首先建立正常及故障状态下系统交流侧的输出电压模型;其次通过对比APF 在正常状态与开路故障后输出线电压的不同,利用标准化的线电压误差值作为诊断变量,结合当前系统控制信号、输出电流的大小来进行故障诊断与定位;最后采用时间标准避免误诊断的发生。所提出的故障诊断方法仅需要控制系统中存在的信号,无须引入额外的传感器,即可实现故障诊断与定位同时完成,且诊断时间限定在采样周期量级。
1 三电平APF 交流侧输出电压特性
三电平APF 系统中共有12 个IGBT,其拓扑结构如图1 所示。考虑到三相电路的对称性及上下桥臂的对偶性,按照故障特征将故障类型分为两大类,即外侧IGBT SX1和SX4(X=a、b、c 表示三相系统某一相电路)故障和内侧IGBT SX2和SX3故障。不失一般性,以Sa1和Sa2故障为例,阐述系统在正常情况及故障情况下系统的输出电压特性。
1.1 正常情况下电压输出特性
三相三线制三电平并联型APF 的拓扑结构如图1 所示。直流侧2 个电容的电压分别为VDC1、VDC2;Ls为APF 输出连接电感;Rs为APF 电路等效电感;ea、eb、ec为电网电压;VDC为直流侧总电压;iX为APF输出电流,并定义电流流出APF 方向为正(iX>0),反之为负为正常情况下系统三相端口相对于中点O 输出电压期望值;SX为三电平变流器X相的控制状态,SX有3 种可能的状态{P,O,N}。APF正常模式下输出电压特性如表1 所示,在正常情况下,系统三相端口输出电压总是为期望值。
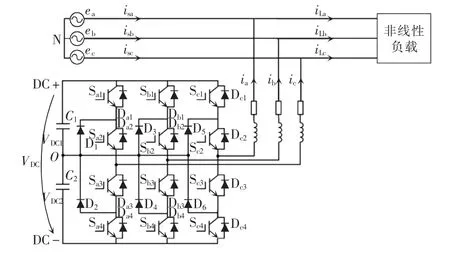
图1 三电平APF 系统拓扑结构Fig.1 Topology of three-level APF system
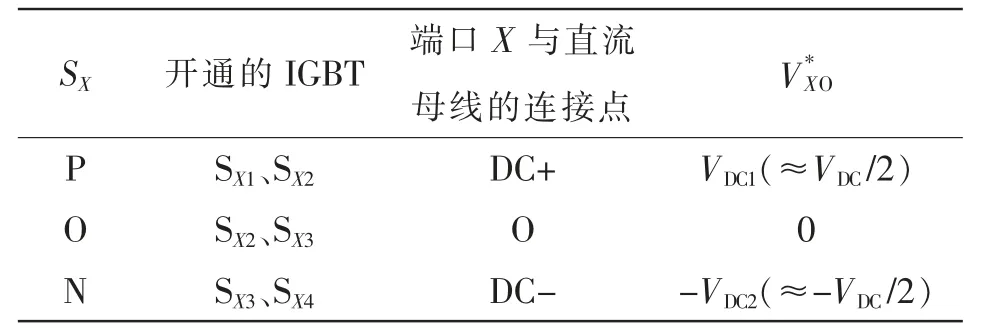
表1 APF 正常模式下输出电压特性Tab.1 Output voltage characteristics of APF in normal mode
1.2 Sa1 故障情况下电压输出特性
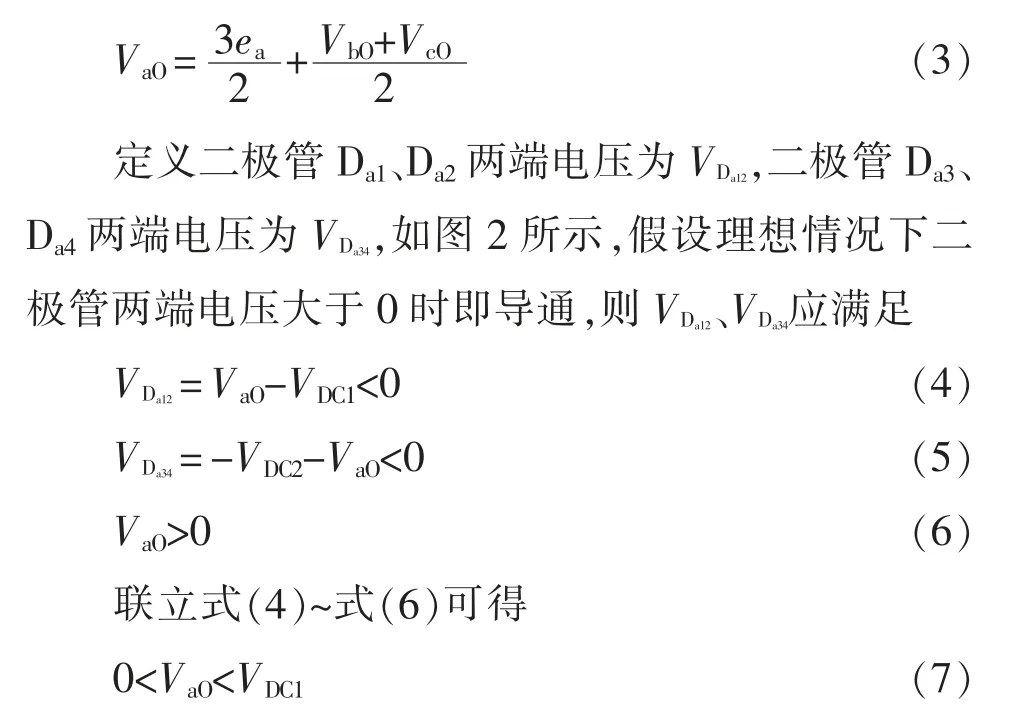
图2 为Sa1故障后变换器a 相的拓扑结构,表2为系统输出特性。定义VaO为故障情况下系统三相端口相对于中点O 输出电压的实际值,从图2 及表2 可以看出,Sa1故障只有在系统输出电流ia≥0、开关状态为P 时对系统输出产生影响。
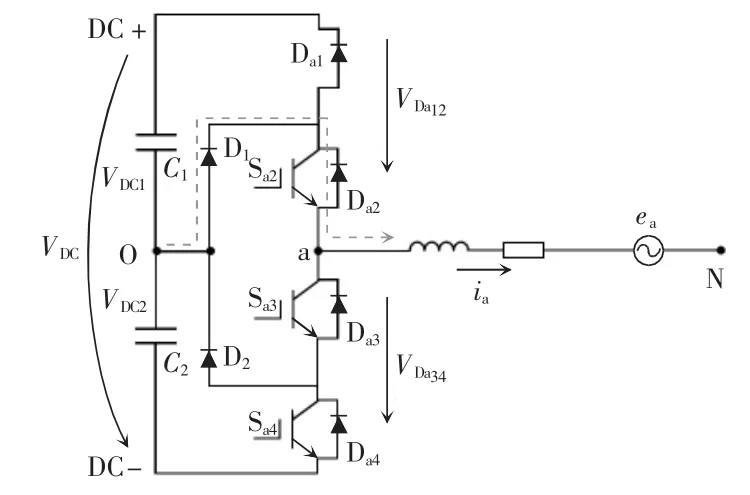
图2 Sa1 故障下系统拓扑结构Fig.2 System topology under fault Sa1
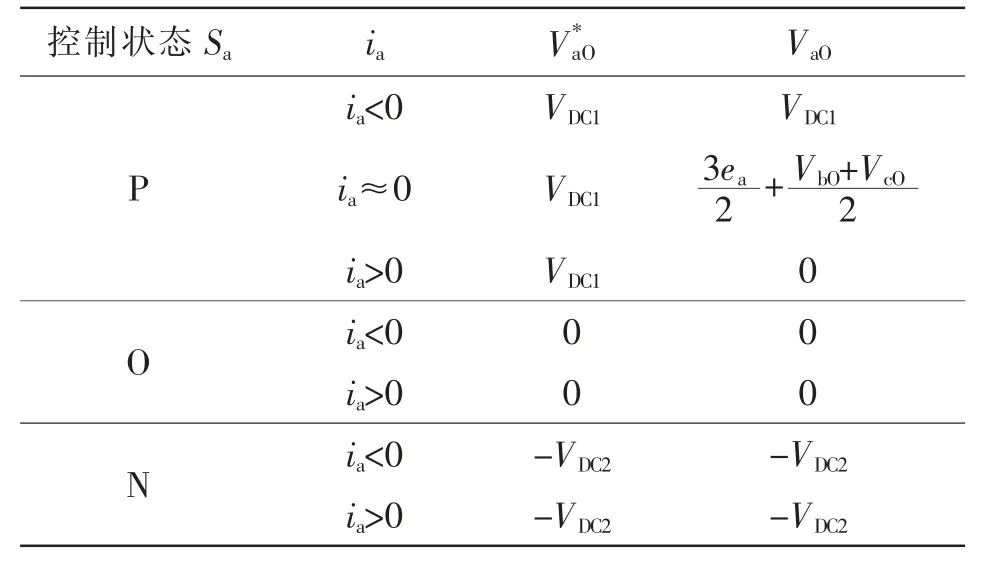
表2 Sa1 故障下系统输出电压特性Tab.2 Output voltage characteristics of system under fault Sa1
当系统输出电流ia>0、开关状态为P 时,由于Sa1发生故障,电流不能流过Sa1、Sa2,交流侧无法输出高电平,此时电流通过D1、Sa2在电感Ls上续流,如图2 中虚线所示,VaO=0。
当系统输出电流ia=0 或ia≈0 时,系统等效电路如图3 所示。此时a 相电路的直流侧与交流侧不导通,系统只有b、c 两相电路导通。

图3 零电流情况下系统等效电路Fig.3 Equivalent circuit of system at zero current
图3 可以描述为
(1)和式(2)可得
1.3 Sa2 故障情况下电压输出特性
Sa2故障后变换器a 相的拓扑结构如图4 所示,表3 为故障后系统输出特性。从图4 及表3 可以看出,Sa2故障只有在系统输出电流ia≥0、开关状态为P 和O 时对系统输出产生影响。
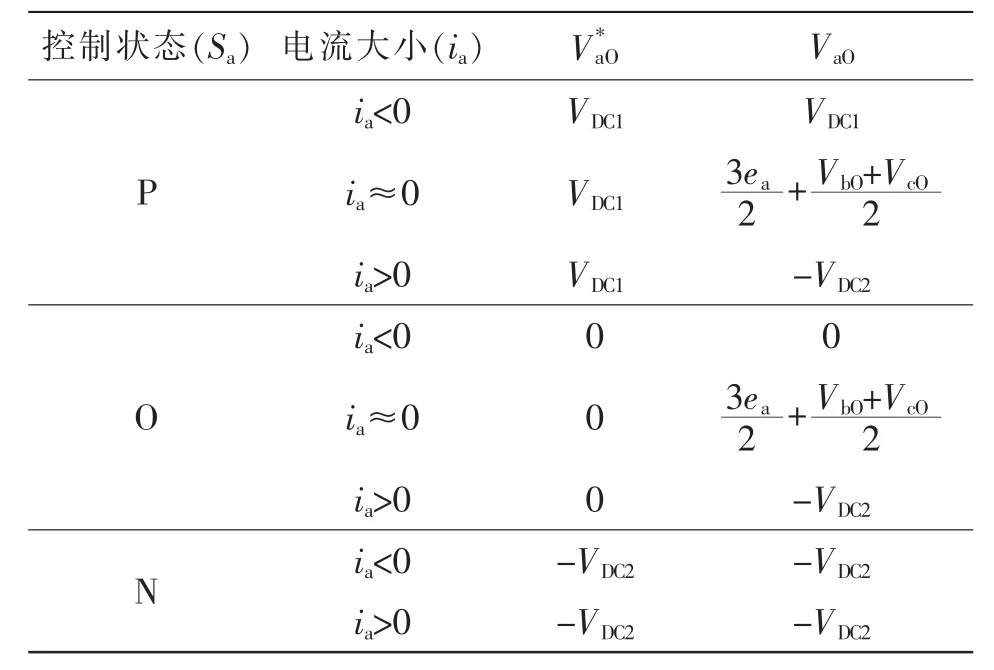
表3 Sa2 故障下系统输出电压特性Tab.3 Output voltage characteristics of system under fault Sa2
当ia>0、开关状态为P 和O 时,由于Sa2发生故障,电流不能流过Sa1、Sa2交流侧,无法输出正电平和0 电平,若a 点和DC-两端电压大于二极管Da3和Da4的管压降之和时,Da3和Da4同时导通,在电感Ls上续流,如图4 中虚线所示,VaO=-VDC2。
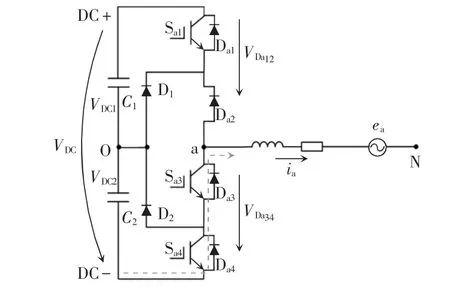
图4 Sa2 故障下系统拓扑结构Fig.4 System topology under fault Sa2
当系统输出电流ia=0 或ia≈0 时,与Sa1故障类似,此时系统的输出电压特性为式(3);当开关状态为P 时,VaO满足-VDC2<VaO<VDC1;当开关状态为O时,VaO满足-VDC2<VaO<0。
2 故障诊断方法
2.1 诊断变量标准化
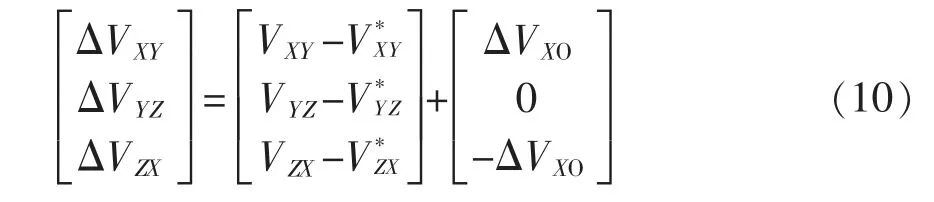
由第1 节分析可知,当系统中某一相中的IGBT发生开路故障,在一些特定的条件(如电流、当前控制状态)下,系统三相端口相对于中点O 输出电压的实际值VXO与输出期望值存在误差ΔVXO,具体为

为了消除系统共模电压的影响,进一步研究功率开关管开路故障对系统输出线电压误差的影响,系统输出线电压为

式中,VXY、VYZ、VZX为系统实际输出线电 压,XY∈{ab、bc、ca}同时XZ∈{ac、ba、cb}。
由式(9)可知,X 相上的功率开关管故障会导致线电压VXY、VZX产生电压误差,其对VYZ没有影响,线电压误差大小为
为了得到线电压误差,还需要系统实际输出线电压,如果利用传感器对系统实际输出电压进行采样测量,则无疑增大了系统的复杂性及硬件成本。因此本文利用APF 系统正常运行所需要的电气采样量,对系统实际输出的线电压进行估算,具体为

系统在正常情况下,线电压的估算值与期望值应该是大致相等的,但当X 相存在功率管开路故障时,线电压估算值与期望值将不再相等,基于这种系统故障后的输出电压特性,提出基于线电压误差的故障诊断算法。为了简化算法,同时确保线电压误差计算值独立于直流母线电压,需要对计算误差值相对于直流侧进行标准化处理,具体公式为

2.2 故障诊断与定位
由第2.1 节的分析可知,不同的IGBT 发生开路故障时ΔVXO大小不同,即jXY大小不同,具体jXY如表4 所示。
由表4 可以看出,系统在发生开路故障后,线电压误差只在特定的控制状态及电流条件下才存在,且不同相的不同开关管故障系统线电压误差标准化值不同;相同相的不同开关管故障系统线电压误差标准化值在不同的电流条件及控制状态下也不相同。因此通过判断线电压误差标准化值即可检测到系统的某一相出现故障;同时结合当前系统检测到的电流大小和当前控制状态信号便可对故障进行定位。系统在非零电流情况下,不同故障对应的故障诊断变量是明确的,但是需要指出的是,在零电流情况下,诊断变量可以取-1~1 之间的任何值,这将导致诊断变量的响应不能像非零电流情况那样明确。特别地,当开关状态为P 时SX2的故障诊断变量包含SX1,当开关状态为N 时SX3的故障诊断变量包含SX4,因此在这种情况下系统将会出现故障的模糊定位。

表4 X 相故障归一化线电压误差值jXYTab.4 Value of normalized line voltage error jXY under phase-X faults
为了进行故障诊断及定位IGBT 的故障位置,定义JXY为
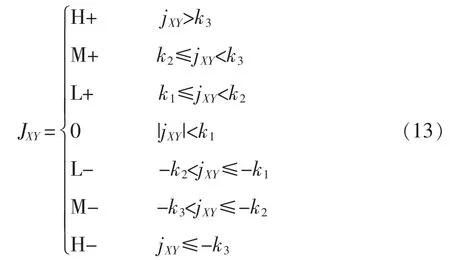
式中,k1、k2、k3为预先设定的比较阈值,且需满足0<k1<k2<0.5<k3<1。这些阈值被用来识别每个特定故障引起的诊断变量值。
基于表4 及式(13)可以建立逻辑条件来检测故障的存在,故障检测条件如表5 所示。

表5 故障检测条件Tab.5 Fault detection conditions
当表5 中的第2 行及第3 行同时满足时,检测到X 相故障,为了定位故障IGBT 的位置,与故障检测类似,也将故障定位简化为一组逻辑关系,当某一组逻辑关系同时被满足时,即可以定位故障IGBT 的位置,故障定位逻辑关系如表6 所示。
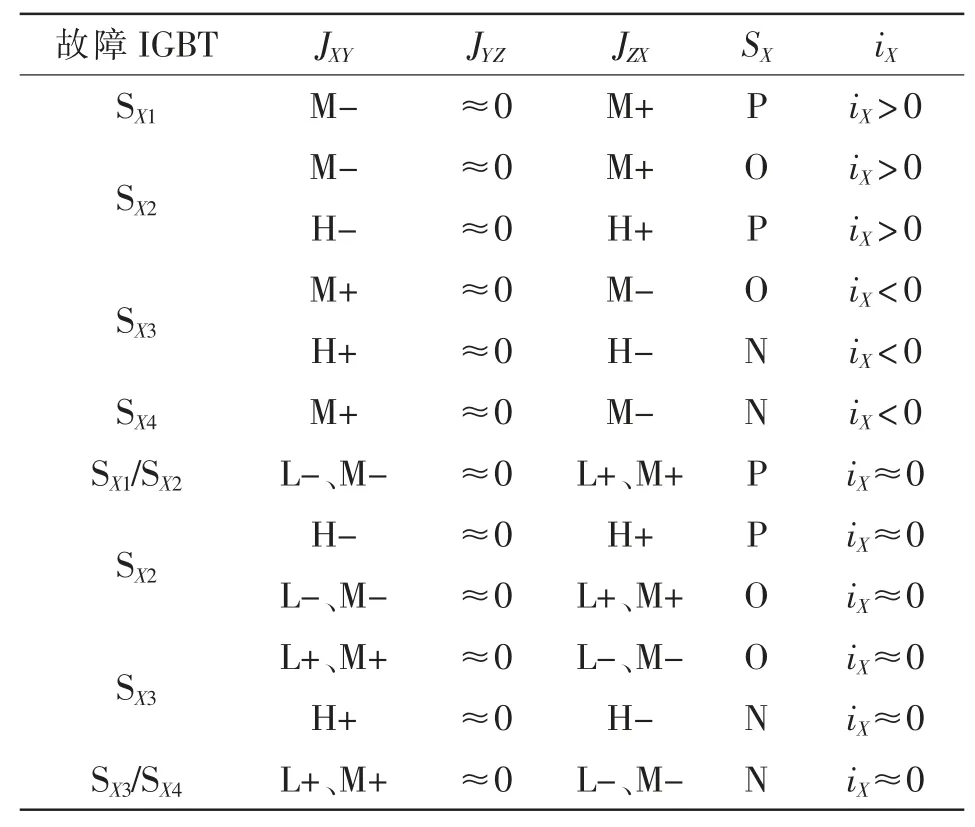
表6 故障定位逻辑关系Tab.6 Logic relationship for fault location
2.3 时间标准
上文分析是假设功率管为理性开关的情况下得到的,而实际中IGBT 并不是理想开关,在开通和关断的过程中均存在一定的延时,这种IGBT 自身固有特性将在系统正常运行中造成电压误差的出现;同时采样的电压、电流信号也会受到传感器噪声或电磁干扰等因素的影响,进而影响实际计算的线电压,也会造成电压误差的出现。电压误差相对于直流侧的标准化及设定的阈值比较在一定程度上包含了上述的误差影响,但为了避免上述情况导致的误诊断,提高故障诊断算法的可靠性,提出了基于标准化线电压误差、输出电流及控制信号的逻辑组合判断与时间宽度的双重标准进行故障诊断与定位。当表5 中某一行的逻辑关系同时满足,系统开始计时,当计时的时间长度te>Tfmin时,才能触发故障检测与定位。对Tfmin定义为

式中:kt为时间因子,其选取应考虑IGBT 的开通和关断时间、传感器测量及采样电路的延迟时间及开关信号的最窄脉冲时间;Ts为信号采样周期。
2.4 故障诊断流程
故障诊断算法流程如图5 所示。故障诊断步骤如下:
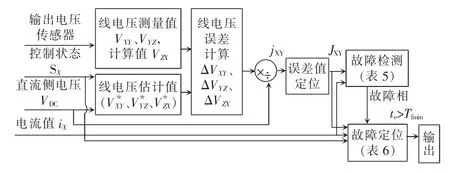
图5 故障检测与定位流程Fig.5 Process of fault detection and location
步骤1利用式(10)进行线电压误差计算;
步骤2对线电压误差值相对于直流侧进行归一化处理;
步骤3利用表5 和表6 进行故障诊断与定位;
步骤4基于表6 和时间宽度te双重标准进行故障定位。
3 仿真与分析
为了验证本文所提故障诊断方法的正确性与可靠性,在基于Matlab/Simulink 环境下搭建了图1所示的三电平APF 系统仿真模型。模型参数为:三相电源为380 V/50 Hz,直流侧电容C1=C2=3.3 mF,直流侧总给定电压为800 V,滤波电感和等效内阻分别为0.1 mH 和0.1 Ω,非线性负载为带有三相整流设备的阻感负载,R=5 Ω,L=5 mH。用于故障诊断与定位算法的参数:k1=0.15、k2=0.40、k3=0.75;时间因子kt=2;采样时间Ts=20 μs;当检测到的电流iX为正常情况下的0.5%时即认为iX≈0。
图6 和图7 分别为APF 在0.32 s 投入运行前后及0.40 s 模拟Sa2开路故障后的系统网侧电流波形及APF 输出电流波形。仿真结果表明在投入APF后,系统网侧电流得到很大改善,同时Sa2开路故障后,APF 系统a 相输出电流发生较大畸变,同时零电流的情况出现频繁。
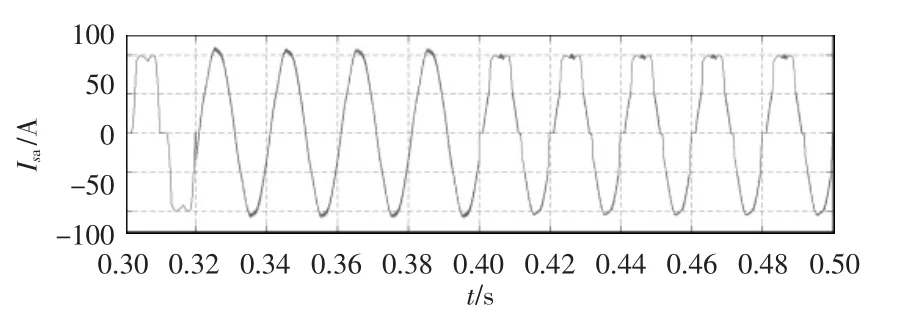
图6 Sa2 正常及故障情况下网侧电流波形Fig.6 Current waveform on grid-side under normal Sa2 and fault conditions
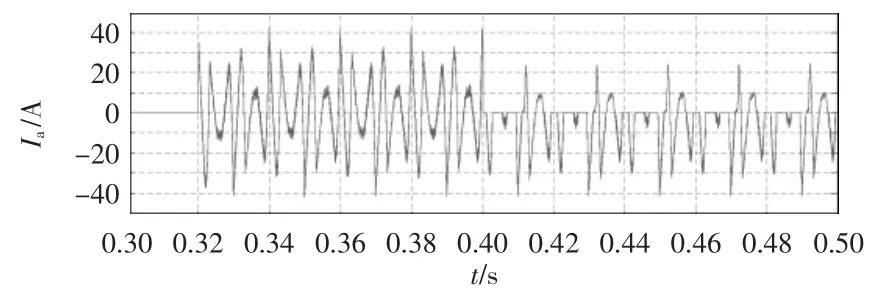
图7 Sa2 正常及故障情况下APF 输出电流波形Fig.7 Output current waveform of APF under normal Sa2 and fault conditions
Sa1开路故障状态下的仿真波形如图8 所示。在t=0.2 ms 时模拟Sa1开路故障,此时系统输出电流ia>0,但是由于当前控制状态Sa=O,不满足故障诊断条件,当控制状态Sa=P 时,诊断变量jab、jca分别同时超过设定阈值-k2和k2,同时jbc≈0,即Jab、Jca分别取值M-和M+,Jbc取值为0,则表4 中的第2行所有逻辑条件被满足,时间宽度te满足大于2 个采样周期的时间,因此Sa1被识别为故障IGBT。检测和识别同时完成,故障检测时间仅需要满足表5中逻辑关系后的2 个采样周期(40 μs)。
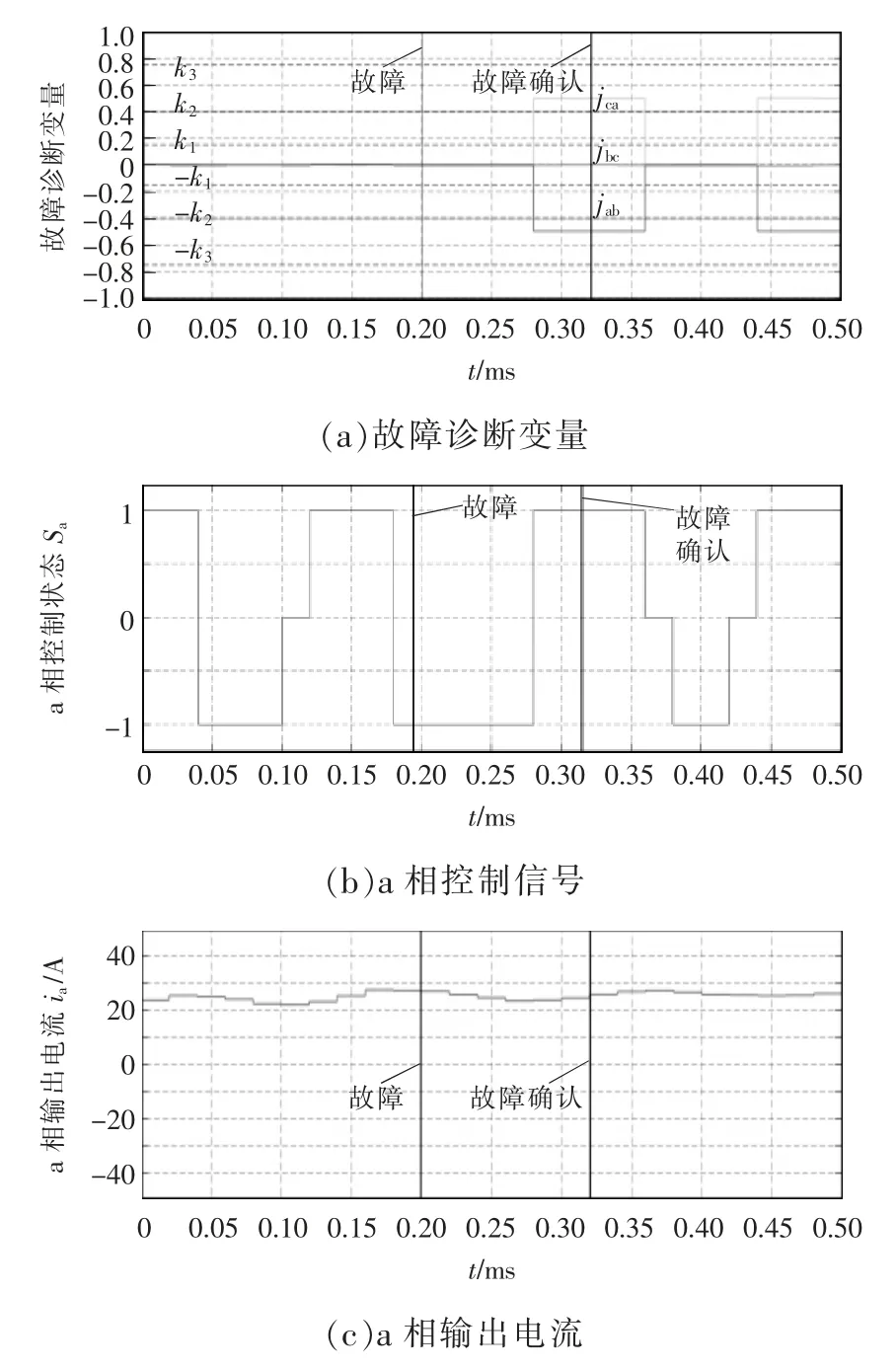
图8 Sa1 故障状态下故障诊断仿真Fig.8 Simulation of fault diagnosis under fault Sa1
为验证零电流情况下故障诊断算法的性能,同时证明在零电流情况下进行故障诊断的必要性,进行了仿真验证。如图9 所示,在t=2 ms 时模拟Sa2发生开路故障,此时ia<0,故障对系统不产生影响,直到ia≈0(t≈6.80 ms)诊断变量jab、jca受到影响,分别同时超过设定阈值-k1和k1,但是持续的时间不超过2 个采样周期(te<Tfmin),不足以引起故障确认与定位。仅当t≈7.05 ms,此时Sa=O、Jab=L-、Jca=L+、Jbc=0,ia≈0,且此逻辑组合持续时间大于2 个采样周期,由表6 可立即识别Sa2发生开路故障。如果系统在零电流情况下不进行故障诊断,则需要等到a相输出电流大于0 时,才能对故障进行确认与定位,这毫无疑问增大了故障诊断所需要的时间。同时,如果a 相输出电流大于0 的情况在故障后不出现,则无法完成对系统的故障诊断。

图9 Sa2 故障状态下零电流时刻故障诊断仿真(1)Fig.9 Simulation(1)of fault diagnosis at zero current under fault Sa2
由表6 可知,零电流情况下可能会出现模糊诊断的现象,如图10 所示。在t=0.10 ms 模拟Sa2发生开路故障,此时ia<0,故障对系统不产生影响,因此零电流时刻(t≈0.78 ms)变为第一个可用的检测条件。由仿真可以看出,系统在t=0.55 ms 和t=0.68 ms 也产生短暂的零电流情况,但是由于持续时间不大于2 个采样周期的时间,因此系统不能确认系统故障及定位故障位置。在t≈0.78 ms 后,此时Sa=P、Jab=L-、Jbc=0、Jca=L+,ia≈0,且此逻辑组合持续时间大于2 个采样周期,由表6 可知,此时故障诊断方法能确定系统a 相发生故障,但是对于故障位置的识别是模糊的,即Sa1/Sa2都有可能发生开路故障。应当指出的是,这种情况下,系统检测到故障,但是对故障位置没有完成定位,这对于具有容错功能的APF 来说,极大地减小了从故障到触发容错控制策略的时间,如果系统需要精确的故障位置信息,则需要更长的时间等待明确的逻辑关系确定故障位置。
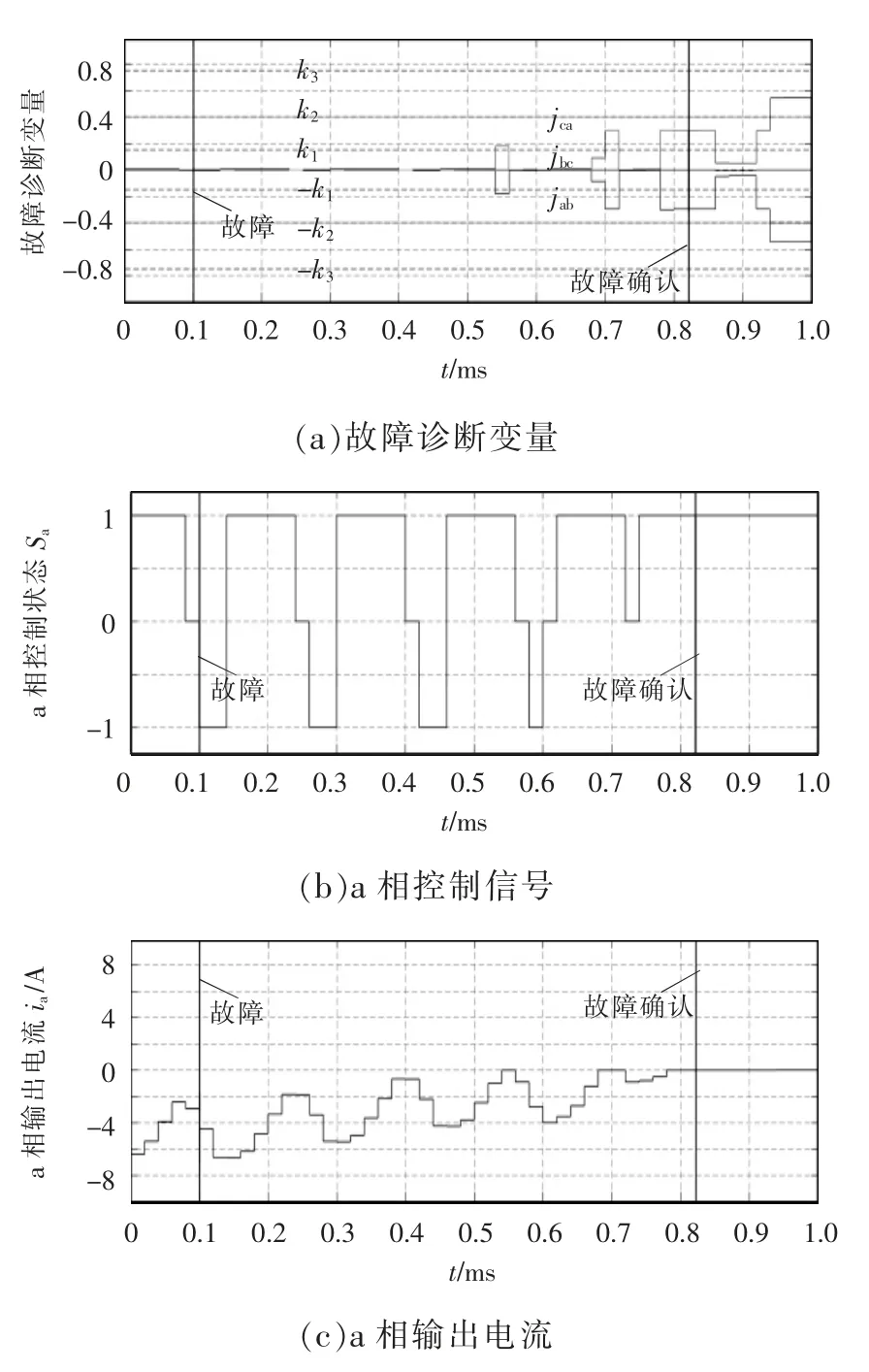
图10 Sa2 故障状态下零电流时刻故障诊断仿真(2)Fig.10 Simulation(2)of fault diagnosis at zero current under fault Sa2
为了验证所提出的故障诊断算法的鲁棒性,在t=0.40 s 时,对系统突加负载,结果如图11 所示。系统在正常运行时有可能会出现dXY大于阈值的情况,但由于持续的时间小于2 个采样周期的时间,因此系统不会出现误诊断,在负载变动后的一小段时间内,dXY出现波动,但均没有超过设定的阈值,仿真结果表明该故障检测方法具有较高的可靠性。
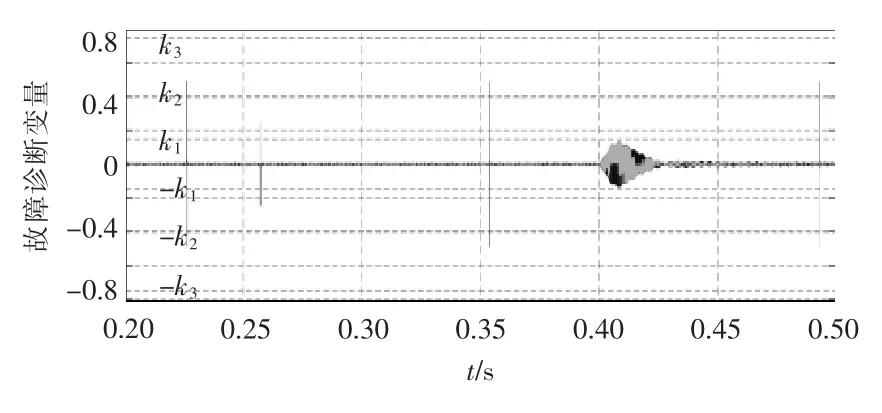
图11 负载突变对故障诊断算法的影响Fig.11 Effect of load mutation on fault diagnosis algorithm
4 结语
本文提出了一种基于线电压误差标准化的三电平APF 控制系统中IGBT 开路故障诊断与定位方法。所提出的故障诊断方法充分利用APF 正常运行所需要的电气采样量对系统实际输出的线电压进行估算,避免了额外传感器的引入;采用标准化的线电压误差作为诊断变量,适用于不同调制策略的控制系统,且独立于直流母线电压;同时采用设定阈值比较与时间标准比较的双重标准,消除了测量误差等因素引起的误诊断,提高了诊断方法的可靠性。仿真分析结果表明,所提出的方法提供了极快的诊断,特别是在非零电流情况下,在满足故障检测的逻辑条件后,只需要系统的2 个采样周期(40 μs)即可完成故障诊断与定位;同时在零电流的情况下也对系统进行故障诊断,这对于具有容错功能的APF 来说,能极大地减少从故障到触发容错功能的时间。但需要指出的是,在零电流情况下可能会模糊故障定位,这种模糊的定位,在需要明确故障位置的应用场合,在等待非零电流情况的出现后也能明确。同时仿真结果也表明了所提故障方法在负载的动态变化过程中不会出现误诊断,具有较高的动态性能。
