分析图像识别技术在零件装配自动识别中的应用
2022-06-03张晓栋
张晓栋
摘要:该文简要介绍了图像识别技术的程序组成与识图功能,分别从图像滤波、图像分割、特征归纳、位置确定等视角,详细解析了零件识图程序的运行过程,采取实验形式验证此种识图方式的可操作性。
关键词:零件;阈值;图像识别技术
中图分类号:TP3 文献标识码:A
文章编号:1009-3044(2022)08-0065-02
在原有装配生产体系中,装配智能程序的各项操作采取预设计形式,完成固定操作的生产程序编辑,借助传感器增强生产控制效果。在装配时完成各类操作程序设定,确保零件、包装箱等要素位置的精准性,以期获取高性能零件产品。
1技术概述
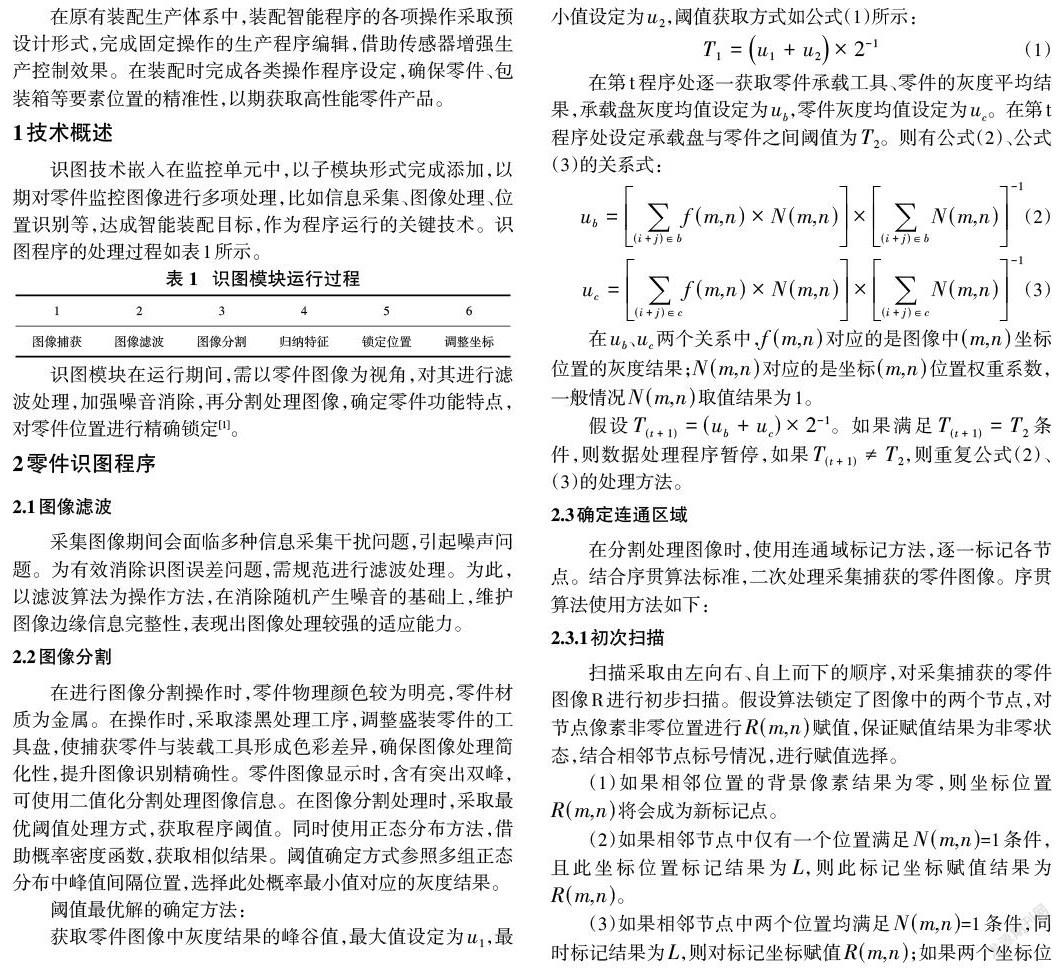
识图技术嵌入在监控单元中,以子模块形式完成添加,以期对零件监控图像进行多项处理,比如信息采集、图像处理、位置识别等,达成智能装配目标,作为程序运行的关键技术。识图程序的处理过程如表1所示。
识图模块在运行期间,需以零件图像为视角,对其进行滤波处理,加强噪音消除,再分割处理图像,确定零件功能特点,对零件位置进行精确锁定[1]。
2零件识图程序
2.1图像滤波
采集图像期间会面临多种信息采集干扰问题,引起噪声问题。为有效消除识图误差问题,需规范进行滤波处理。为此,以滤波算法为操作方法,在消除随机产生噪音的基础上,维护图像边缘信息完整性,表现出图像处理较强的适应能力。
2.2图像分割
在进行图像分割操作时,零件物理颜色较为明亮,零件材质为金属。在操作时,采取漆黑处理工序,调整盛装零件的工具盘,使捕获零件与装载工具形成色彩差异,确保图像处理简化性,提升图像识别精确性。零件图像显示时,含有突出双峰,可使用二值化分割处理图像信息。在图像分割处理时,采取最优阈值处理方式,获取程序阈值。同时使用正态分布方法,借助概率密度函数,获取相似结果。阈值确定方式参照多组正态分布中峰值间隔位置,选择此处概率最小值对应的灰度结果。
阈值最优解的确定方法:
2.3确定连通区域
在分割处理图像时,使用连通域标记方法,逐一标记各节点。结合序贯算法标准,二次处理采集捕获的零件图像。序贯算法使用方法如下:
2.3.1初次扫描
扫描采取由左向右、自上而下的顺序,对采集捕获的零件图像R进行初步扫描。假设算法锁定了图像中的两个节点,对节点像素非零位置进行[R(m,n)]赋值,保证赋值结果为非零状态,结合相邻节点标号情况,进行赋值选择。
(1)如果相邻位置的背景像素结果为零,则坐标位置[R(m,n)]将会成为新标记点。
(2)如果相邻节点中仅有一个位置满足[N(m,n)]=1条件,且此坐标位置标记结果为[L],则此标记坐标赋值结果为[R(m,n)]。
(3)如果相邻节点中两个位置均满足[N(m,n)]=1条件,同时标记结果为[L],则对标记坐标赋值[R(m,n)];如果两个坐标位置标记结果分别为[I]与[J],则采取标记合并处理,进行标号存储时,采取等价处理方式,将坐标存储在独立的数据表中,相同价表中含有的各类连通成分均被标记了唯一码。
2.3.2二次扫描
在等价结果中,选择其中一个节点进行标记处理,同时对连通域中各节点分配标号。一般情况下,一个连通域会获得较小的标记结果。二次扫描中保证每个连通域获得了分配码具有唯一性。在分割处理零件采集图像时,使用二值化分割方法,加强区域阈值消除环境噪音,再使用序贯算法对图像进行标记处理,各类连通域逐一完成标记[2]。
2.4归纳零件特征
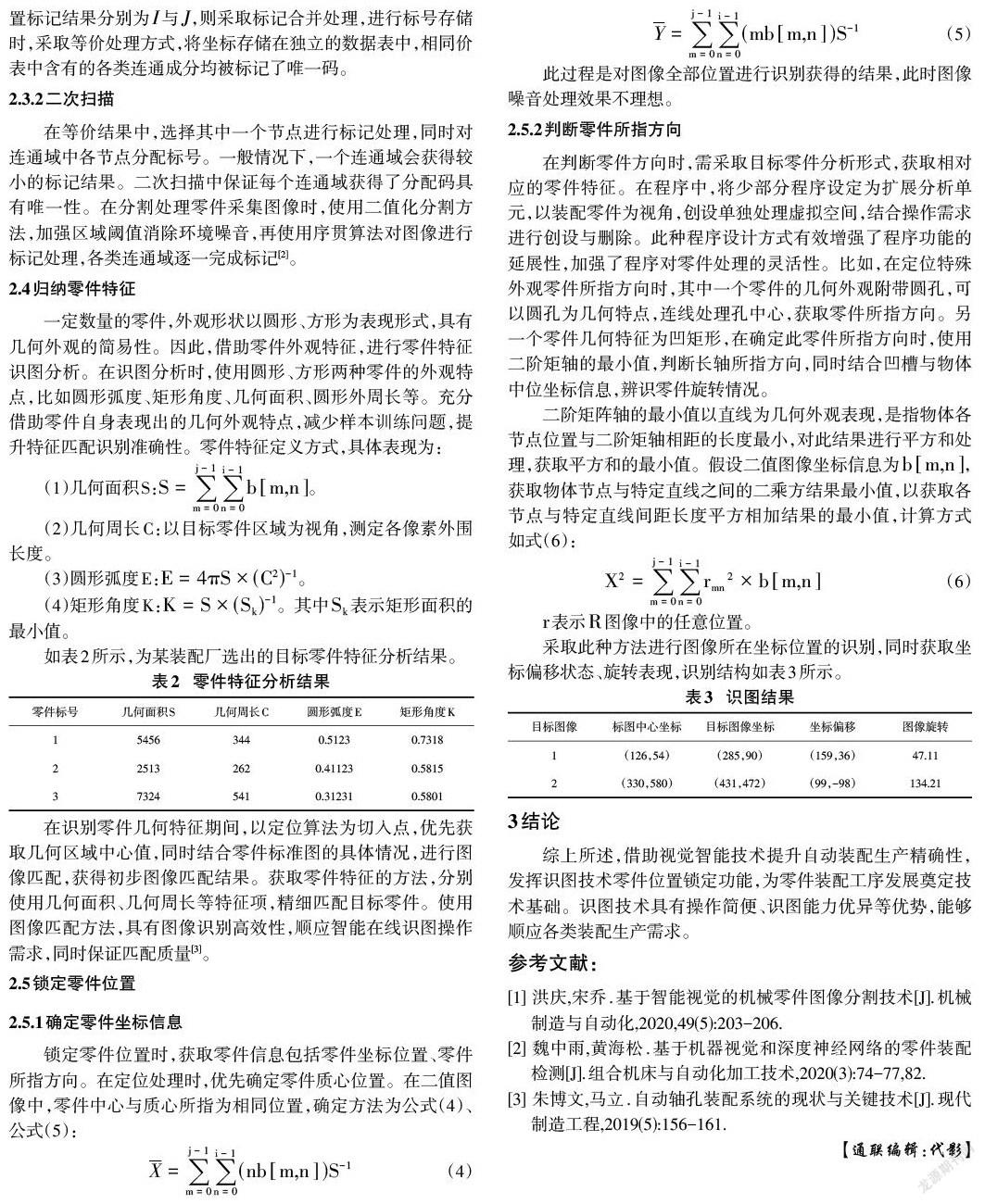
一定数量的零件,外观形状以圆形、方形为表现形式,具有几何外观的简易性。因此,借助零件外观特征,进行零件特征识图分析。在识图分析时,使用圆形、方形两种零件的外观特点,比如圆形弧度、矩形角度、几何面积、圆形外周长等。充分借助零件自身表现出的几何外观特点,减少样本训练问题,提升特征匹配识别准确性。零件特征定义方式,具体表现为:
(1)几何面积S:[S=m=0j-1n=0i-1b[m,n]]。
(2)几何周长C:以目标零件区域为视角,测定各像素外围长度。
(3)圆形弧度E:[E=4πS×(C2)-1]。
(4)矩形角度K:[K=S×(Sk)-1]。其中[Sk]表示矩形面积的最小值。
如表2所示,为某装配厂选出的目标零件特征分析结果。
在识别零件几何特征期间,以定位算法为切入点,优先获取几何区域中心值,同时结合零件标准图的具体情况,进行图像匹配,獲得初步图像匹配结果。获取零件特征的方法,分别使用几何面积、几何周长等特征项,精细匹配目标零件。使用图像匹配方法,具有图像识别高效性,顺应智能在线识图操作需求,同时保证匹配质量[3]。
2.5锁定零件位置
2.5.1确定零件坐标信息
锁定零件位置时,获取零件信息包括零件坐标位置、零件所指方向。在定位处理时,优先确定零件质心位置。在二值图像中,零件中心与质心所指为相同位置,确定方法为公式(4)、公式(5):
此过程是对图像全部位置进行识别获得的结果,此时图像噪音处理效果不理想。
2.5.2判断零件所指方向
在判断零件方向时,需采取目标零件分析形式,获取相对应的零件特征。在程序中,将少部分程序设定为扩展分析单元,以装配零件为视角,创设单独处理虚拟空间,结合操作需求进行创设与删除。此种程序设计方式有效增强了程序功能的延展性,加强了程序对零件处理的灵活性。比如,在定位特殊外观零件所指方向时,其中一个零件的几何外观附带圆孔,可以圆孔为几何特点,连线处理孔中心,获取零件所指方向。另一个零件几何特征为凹矩形,在确定此零件所指方向时,使用二阶矩轴的最小值,判断长轴所指方向,同时结合凹槽与物体中位坐标信息,辨识零件旋转情况。
二阶矩阵轴的最小值以直线为几何外观表现,是指物体各节点位置与二阶矩轴相距的长度最小,对此结果进行平方和处理,获取平方和的最小值。假设二值图像坐标信息为[b[m,n]],获取物体节点与特定直线之间的二乘方结果最小值,以获取各节点与特定直线间距长度平方相加结果的最小值,计算方式如式(6):
3结论
综上所述,借助视觉智能技术提升自动装配生产精确性,发挥识图技术零件位置锁定功能,为零件装配工序发展奠定技术基础。识图技术具有操作简便、识图能力优异等优势,能够顺应各类装配生产需求。
参考文献:
[1] 洪庆,宋乔.基于智能视觉的机械零件图像分割技术[J].机械制造与自动化,2020,49(5):203-206.
[2] 魏中雨,黄海松.基于机器视觉和深度神经网络的零件装配检测[J].组合机床与自动化加工技术,2020(3):74-77,82.
[3] 朱博文,马立.自动轴孔装配系统的现状与关键技术[J].现代制造工程,2019(5):156-161.
【通联编辑:代影】
