高速公路施工区防闯入主动预警系统开发
2022-05-30于会江李晓琦胡帅
于会江 李晓琦 胡帅
摘 要:高速公路施工占用路段的车道数和车道宽度减少,需要车辆在施工上游进行换道,易造成该路段拥堵,严重时可能诱发交通事故。因此为保证高速路施工路段维修人员及驾驶人的安全,研发出施工区防闯入主动预警系统。该系统通过分析毫米波雷达采集的实时数据来描述车辆行驶轨迹,并采用滚动动态窗格的方法剔除虚假目标,并对车辆轨迹进行了短期预测,建立了早期预警机制。在车辆存在闯入意图时对施工人员进行及时疏散,这对于降低施工区交通事故率及事故后的生命财产损失具有重要意义。
关键词:主动预警;数据采集;剔除假目标;滑动轨迹窗格;施工区
中图分类号:U495 文献标识码:A 文章编号:2096-6903(2022)09-0097-04
0 引言
由于车辆冲入施工区造成驾驶员和施工人员受伤的案例数不胜数。2020年9月,在东吕高速发生一起交通事故,一名高速公路施工人员被撞伤;2015年1月17日,一辆温州牌照的白色路虎车闯入诸永高速温州施工区,致1名施工人员受伤;2013年8月7日,一辆本田轿车途经S33松阳段时,斜插进施工区,致后排乘客死亡;2013年7月18日,一辆重型牵引车在京台高速徐州段闯入施工区,致2人死亡。
随着车辆闯入高速公路施工区安全事故的频频报道,高速公路施工区防闯入问题已经成为国内外学者关注的焦点问题。于英等人利用概率统计的方法对高速公路施工的数据进行分析,研究如何科学合理地使用和布设交通安全设施,组织最优安全施工,提出养护施工安全对策和措施,力求减少养护施工对道路交通的影响,确保道路养护施工安全[1]。孟祥海等人通过采集和分析处理高速公路半幅封闭施工区和单向超车道封闭施工区合流段和施工区段的车型,车速,车头时距等基于车辆个体的交通参数数据,提出了基于避免碰撞时间(TTC)的追尾冲突数计算方法和基于避免碰撞减速度(DRAC)的追尾风险度计算方法[2]。王延博利用物联网技术,构建云-边-端一体架构的施工安全预警平台,实现了施工现场海量信息的实时获取以及数据共享,施工现场安全的动态、智能预警[3]。邓超将ZigBee技术和BIM技术集成应用于工程施工安全预警管理中,设计开发了一种实时的施工安全预警系统,将以人为主的管理方式转变而以人网结合的监管方式,提高了监管效率,有效地降低了事故发生率[4]。吴彪等人以交通流平均速度,平均车道占有率及速度变异系数等宏观交通流参数表征施工区行车风险。综合考虑通行能力和交通安全等因素,给出4种高速公路施工区提前警告区域限速标志设置方案。4车道高速公路行车道封闭养护施工时,提前警告区在原60 km/h限速标志的基础上,增设80 km/h限速标志的方案较为有效[5]。Qin Jian et al提出了一种对铁路施工人员和车辆进行预警的软硬件系统,该系统通过检测车辆与工人之间的距离进行预警[6]。Zhong Hua et al设计了一种基于红外的建筑工作区预警系统,这是一种测试和通信方面比较传统的入侵检测系统[7]。Je Jin Park通过虚拟驾驶模拟器和驾驶员偏好调查,发现73%的被调查者偏好荧光橙色的导向标志,其研究结果为保证高速公路和一般道路上道路作业区的交通安全,提高交通流效率,预防交通事故提供了有效数据[8]。
针对施工区上游车辆行驶速度高、车流量大、且存在驾驶人疲劳分心等现状,在有齐全警戒、提示标志的条件下,以保证交通安全和施工安全为目标,提出一种高速路施工区防闯入主动预警装备,识别可能冲入施工区的上游车辆,在施工区上游对驾驶人进行预警,并将车辆闯入施工区意图信息提供给道路施工人员,降低高速公路过往车辆闯入施工区发生交通事故的概率。
1 系统硬件
施工区防闯入主动预警系统,主要应用于高速公路施工区,将雷达与声光报警器1置于施工区上游200 m处,施工区放置报警器2,雷达可以持续监测上游车辆的速度、距离、车道等信息,并通过算法分析车辆是否具有冲入施工区的可能,如果有,便会及时通过报警器2提醒施工人员进行撤离,同时报警器1也会提醒驾驶员谨慎驾驶,注意前方施工区。本系统装置主要由毫米波电子扫描雷达(ESR)、嵌入式工控机、声光报警器、锂离子移动电源、CAN总线服务器、RS485总线服务器和稳压电路组成。利用ESR采集施工区占用车道上游车辆运动信息,并对目标车辆的速度、距离、车道等信息进行分析,预测可能冲入施工区域的车辆。对施工人员进行疏散,减少施工区发生交通事故的概率。同时,当高速公路上发生交通事故时,若不能及时提醒后方车辆进行避让,很容易发生二次事故,造成更加严重的后果。当发生轻微事故时,将本产品置于事故现场上游,来提醒上游车辆司机前方发生事故,注意避让,从而减少二次事故的发生。
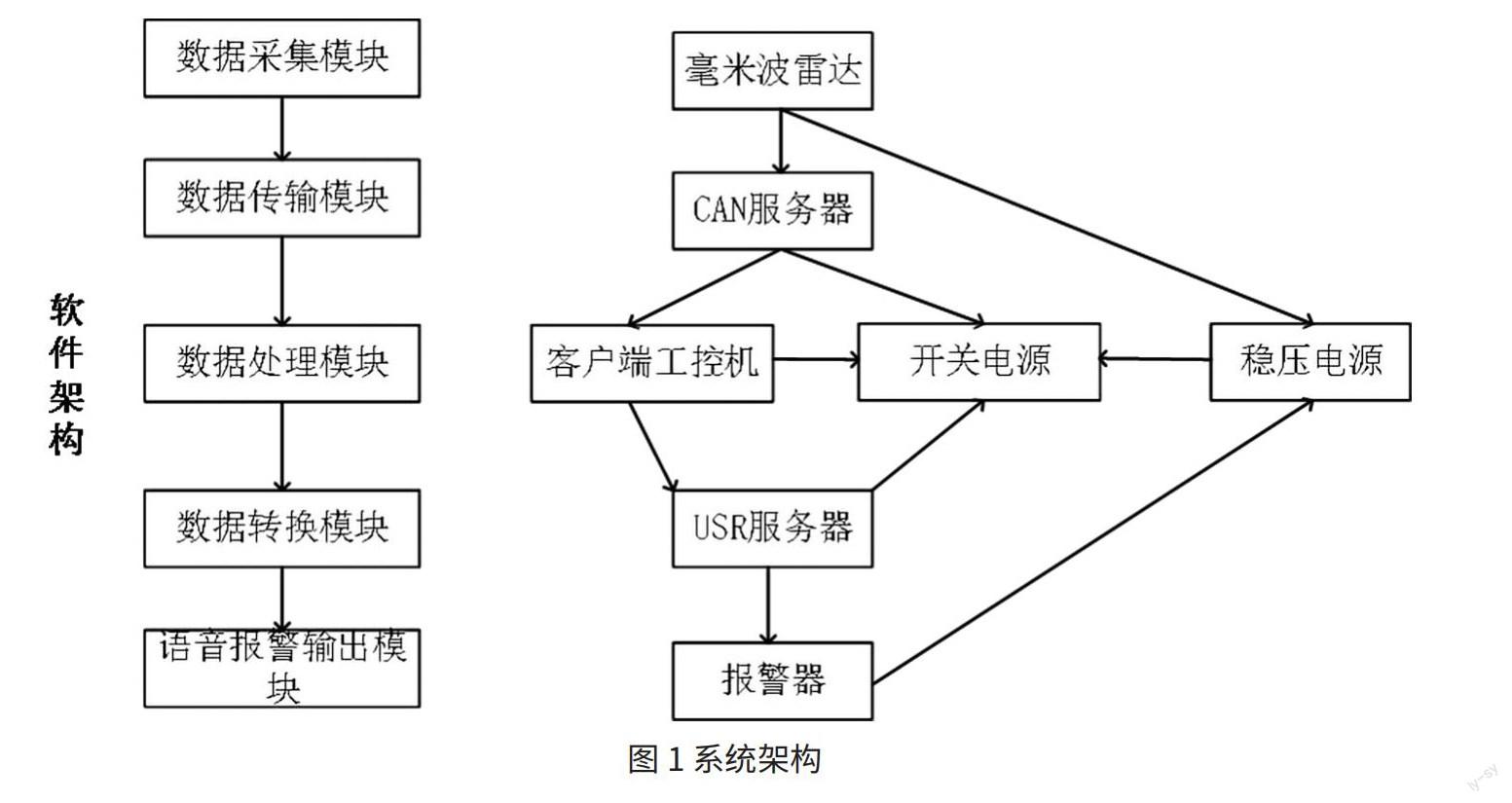
高速公路车辆闯入施工区智能预警系统包括数据采集模块、数据传输模块、数据处理模块、数据转换模块、报警数据输出模块等五个模块组成。这五个模块合称为系统架构,系统架构包括硬件架构和软件架构如图1所示。
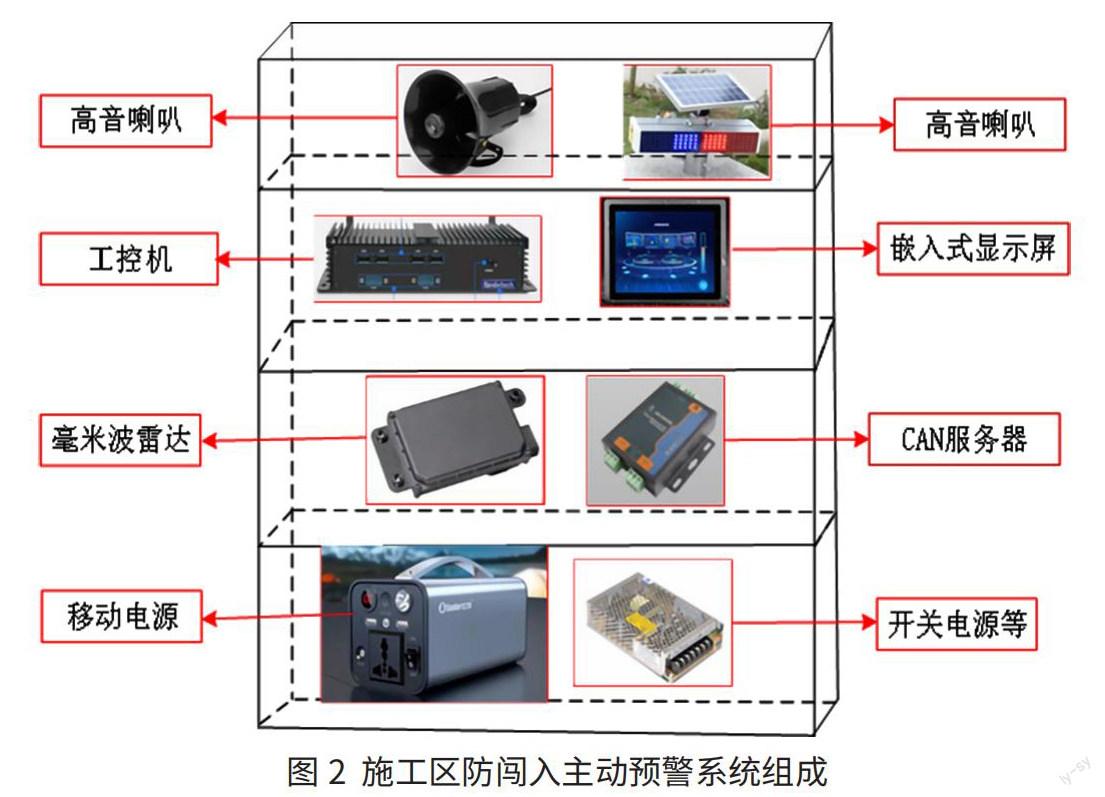
施工区防闯入主动预警实物在行李箱中的摆放位置关系如图2所示:移动电源输出220 V给稳压电源、工控机和显示器,开關电源输出12 V给CAN服务器和毫米波雷达;毫米波雷达输出端口接入CAN服务器的CAN1接口端,CAN服务器的以太网端接入工控机;当识别出车辆存在闯入风险时,工控机通过485服务器向报警器发送指令生成控制策略,控制策略驱动高功率喇叭预警和爆闪警示灯向驾驶人和施工人员发送预警信息。
探测障碍物的ESR是高频电子扫描雷达,发射波段为76~77 GHz,同时具有中距离(Middle Range)和远距离(Long Range)的扫描能力,体积大小为:130 mm×90 mm×39 mm。ESR雷达测量范围包括短距离(角度范围±45°,测距60 m)和长距离(角度范围±10°,测距175 m)两种,能够同时实现多个目标的连续追踪,且其对烟尘、雾拥有较强穿透能力。单个ESR雷达可提供中距离宽覆盖范围和高分辨率长距离功能,中距离宽视角不仅可以发现邻近车道侧向切入的车辆,而且可以识别交叉在大车间的车辆和行人。长距离可提供精确的距离和速度数据,强大的目标区分能力,最多可识别64个目标。
语音报警器本身自带12个报警音调,可根据报警器放置的不同场景选择不同的报警内容。通过USB添加或更换MP3语音文件,需将报警器通过USB接线和电脑连接,共有30级音量,最高可达120 dB报警音量,声音传播范围广,报警效果好,可在室外使用密封性较好防水防震。LED灯柱节能减耗使用寿命长久,可使用厂家配置的遥控器调节音量大小,也可以在python上编写的报警指令控制音量闪烁灯,如指令01 10 00 10 00 05 0A 00 03 00 10 01 02 00 02 02 01 0C 68含义为设置警示灯和报警音打开,音量为 16 级,第1个文件夹第2曲目,单曲同步播放,警示灯爆闪。
CAN通讯协议主要描述设备之间的信息传递方式。CAN转以太网设备是一款CAN与网络设备通信的设备,实现CAN数据与工控机的数据通信。其内部集成了两路CAN接口和一路EtherNet接口以及TCP/IP 协议栈。使用户可以轻松完成 CAN-bus网络和EtherNet网络的互连互通,进一步拓展CAN-bus网络的范围。CANET200在实现CAN与以太网数据通信的基础上增加一路串口功能。该串口独立于CAN工作,可以实现串口设备与以太网的数据交互。串口为RS485通信方式,通信距离更远,传输能力更强。
2 系统软件
2.1 数据采集
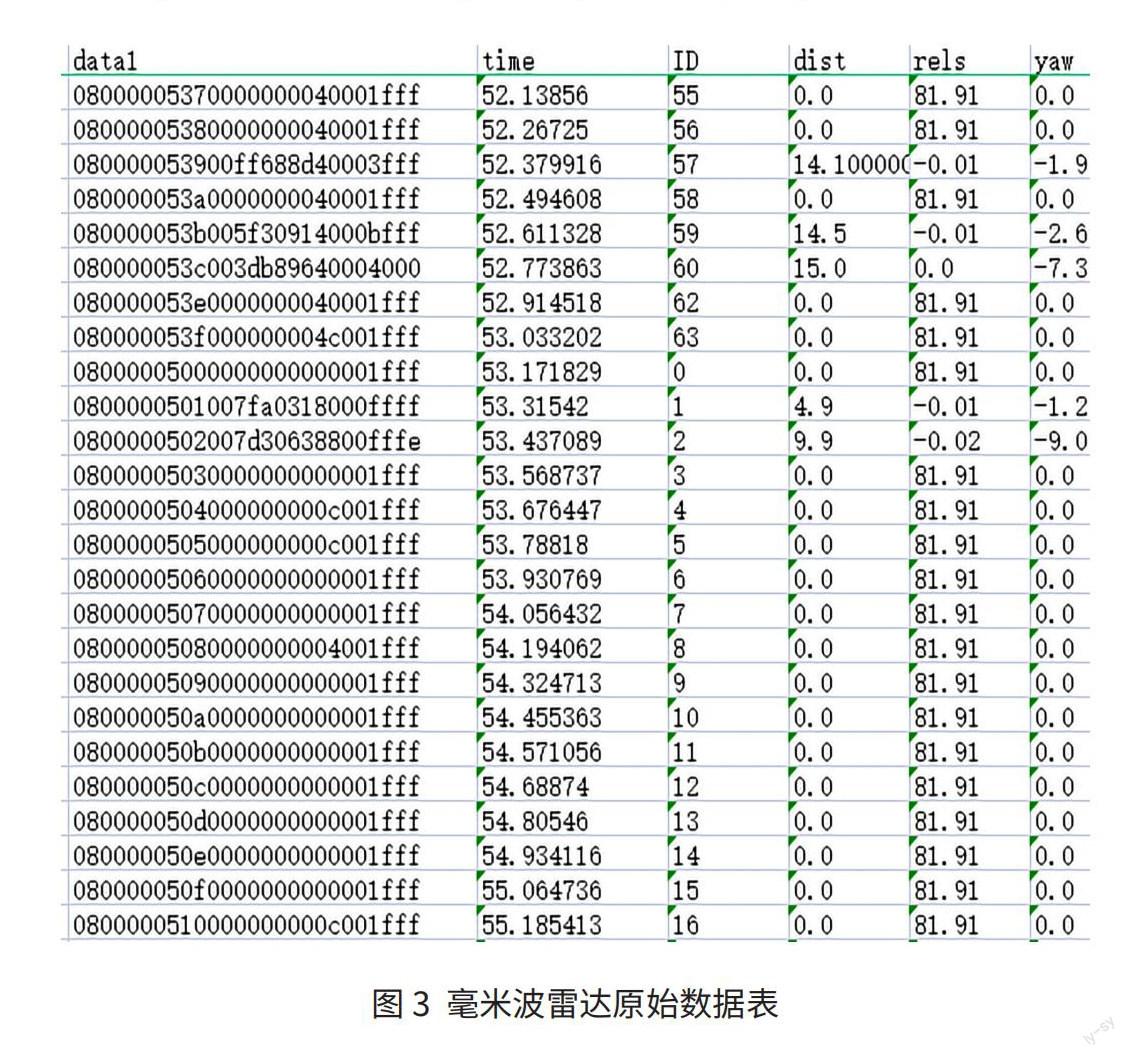
通过查阅ESR雷达说明之后,利用Python软件初步完成了对雷达数据的显示程序,并连接好设备进行了实验,可以显示采集的原始雷达数据如图3所示。由于采用多普勒测速原理,默认的速度值会有一个很小的波动值。CAN转以太网服务器监听设定的端口并等待TCP/IP客户端连接。CAN设备发送的数据将通过CAN设备透明传输给所有链接成功的客户端。
在毫米波雷达采集数据前需将CANET200网口用网线连接电脑网口,电脑IP和USR-CANET200的IP设置同一网段。CANET200默认IP是192.168.0.7。因此电脑设置静态IP:192.168.0.X,其中X在100~200间取值,子网掩码 255.255.255.0,网关192.168.0.1。用CANET200设置CAN服务器的配置参数。图4表示毫米波雷达接收数据流程图。
2.2 数据处理
首先,使用CANalyst-II分析仪,查找数据传输过程中是否存在丢失或其他问题,通过USB连接线将CANalyst-II分析仪与PC的USB接口相连,运行工具软件USB-CAN Tool.exe测试程序,测试之后并没有找到问题。
然后,为了排除雷达本身有问题,另外又换了激光雷达进行实验,得到的数据结果基本没有變化,之后又联系了雷达公司的技术人员,讨论交流了遇到的困难,在其帮助下,使用了ESR-DV可以清晰的观察到雷达所测到的车辆目标,其中矩形框表示观察到的目标,白色矩形框表示静止的车辆目标,红色矩形框表示驶来的目标,绿色矩形框表示离去的目标,将观察到的目标ID,相对速度、距离、角度输出到视图窗口下面,可以方便实时观察输出的数据是否符合道路上车辆经过的实际情况。
根据雷达数据解析代码的计算公式,以速度字段为例,将16进制的雷达原始数据转换成常用的10进制数。
2.3 决策控制
施工区防闯入智能预警装备中的毫米波雷达采集施工区上游200 m内道路上车辆与预警装备之间的相对速度、距离和角度信息,从而获取车辆的行驶轨迹。然后使用预警算法来确定它是否为入侵,是否应向工人发出警告,算法计算检测到的车辆在行驶轨迹内的平均加速度。根据车辆在当前时刻的横向位置,判断车辆所在的车道是否为施工封闭的车道。若车辆所在的车道是施工封闭的车道,则根据车辆行驶轨迹,判断车辆是否存在冲入施工区的风险。若车辆所在的车道不是施工封闭的车道,即车辆在可通行车道上行驶。若存在车辆闯入风险,则启动语音告警和爆闪警示灯,快速疏散施工人员。如果没有,工人就不会得到警报。
获取道路上某一车辆的行驶轨迹,并计算该车辆在所述行驶轨迹内的平均加速度an,按照式(1)进行:
(1)
其中,车辆在tn时刻的位置为(xn,yn),车速为vn;在下一时刻t'n的位置为(x'n,y'n),车速为v'n。
计算车辆距离所述风险识别模块的纵向距离和横向距离,如式(2)所示:
(2)
其中,xn为车辆距离毫米波雷达的纵向距离,yn为车辆距离毫米波雷达的横向距离;d为车辆距离毫米波雷达的距离,α为车辆与毫米波雷达的夹角;然后根据车辆与车道边界的横向距离,和与高速公路施工区防闯入智能预警装备的纵向距离,判断车辆在道路中所处的车道是否为施工封闭车道。
行驶在封闭车道上游的车辆,其闯入施工区的意图可通过下述条件研判:
当车速vn超过80 km/h,与毫米波雷达的纵向距离xn<120 m,xn<-TTC*vn时,认为该车辆存在冲入施工区域的风险;在本文中TTC为施工区从施工区跑到安全区所需时间阈值,TTC越短,施工人应急反应越快,碰撞可能性越小。
(3)
其中l为车身长度,m。
高速公路施工区防闯入智能预警装备对施工区作业人员的预警,如图5所示,按照如下步骤进行。
3 系统测试
购置系统所需配件,包括用于语音告警的报警器,方便室外实验测试的大功率移动电源,设计购置安装已有设备的置物架以及行李箱等,再根据高音喇叭协议编制报警程序以及界面显示程序,并在南校区东院校门口马路旁做了初步实验测试,可以监测到路过车辆,并且当车辆速度达到一定值时可以驱动报警器报警。在路边测试时,界面可以显示目标的距离、速度和角度,其中目标0和目标1的速度分别为81.91 m/s和-0.05 m/s,可以判断为假目标,不会触发报警器报警,其中64个目标都可以通过界面按钮设置观察到它们的距离、速度和角度,目标的距离、速度和角度的变化可以通过图像曲线实时观察到。
对界面程序进行了优化,使得整体更加美观,且能更直观的显示实测所得到的信息。但路测时我们发现,高音喇叭在报警时,其在界面上的显示有出入,对于检测到需要报警的ID,在“是否真实目标”和“是否报警”栏中不能同时显示“Yes”,于是对界面程序进行了进一步的优化处理,优化后该问题得到了解决,并且能在采集数据过程中可以实时转换到有效目标的界面,观察探测到的有效目标的距离,速度和角度。
4 结语
高速公路车辆闯入施工区智能预警系统,实时地将雷达检测、数据传输、数据解析、虚假目标的剔除和真目标轨迹的关联、主动安全预警算法和语音播报结合起来为高速公路维互施工人员提供安全保障。后期研究将提升预警设备的智能化程度,能够识别车辆紧急换道意图。
参考文献
[1] 于英,王敏,金明新,等.高速公路养护施工区安全特性的研究[J].中外公路, 2007, 27(6): 186-189.
[2] 孟祥海,徐汉清,王浩,等.基于TTC及DRAC的高速公路施工区追尾冲突研究[J].交通信息与安全,2012,30(6):6-10.
[3] 王延博,徐苍博,祁岩.施工安全动态智能预警平台设计与应用[J].建筑机械化,2021,42(9):80-84.
[4] 邓超.ZigBee與BIM技术融合的施工安全预警系统研究[D].武汉:武汉科技大学,2020.
[5] 吴彪,许洪国,戴彤焱,等.高速公路施工区提前警告区域限速方案风险评价[J].合肥工业大学学报:自然科学版,2013, 36(11):1295-1299.
[6] QIN Jian. Solution of Safety Earning Warning Protection System for Railway Operating Workers and Vehicles Based on Beidou[J].Railway Computer Application, 2017(9):2412-2422.
[7] Zhong Hua,LI Lu.Design and Application of Safety Early Warning System in Expressway Operation Area[J].SCIENCE AND TECHNOLOGY OF JILIN COMMUNICATIONS, 2013(2): 12-17.
[8] Park J J , Seo I K , Lee G Y . Evaluation of the Expressway Work Zone Guidance Systems Using a Virtual Driving Simulator[J].KSCE Journal of Civil Engineering,2021,25(4):1446-1454.
