智轨电车直线行驶性能研究
2022-05-25付建朝张陈林钟汉文李俊义
付建朝,肖 磊,杨 勇,张陈林,钟汉文,李俊义,熊 博
(湖南中车智行科技有限公司,湖南 长沙 410000)
0 引言
智轨电车作为新型的城市轨道交通工具,是一种三节编组、双铰接盘、六轴全转向车辆,车辆自由度较多,各个胶轮瞬时状态将直接影响到智轨列车直线行驶性能,各个胶轮瞬时状态不协同则会造成车辆跑偏,或造成车身以“Z”字型、“C”字型姿态行驶,严重时会造成操作稳定性问题,如甩尾、侧翻。
1 悬架K&C特性研究
1.1 第一轴悬架K&C特性研究
建立第一轴悬架转向Simpack模型(见图1),保持方向盘输入角度为0°,轮胎上跳50 mm,下跳50 mm进行平行轮跳仿真。

图1 第一轴悬架
其中X轴为车轮垂直跳动位移,Y轴为随车轮垂直跳动的车轮角度值。从图2可知:①车轮跳动会产生轮胎转向。②平行轮跳时轮胎始终向右转向。③在轮胎下跳50 mm时轮胎转角为0.4°,在轮胎上跳50 mm时轮胎转角为0.7°。
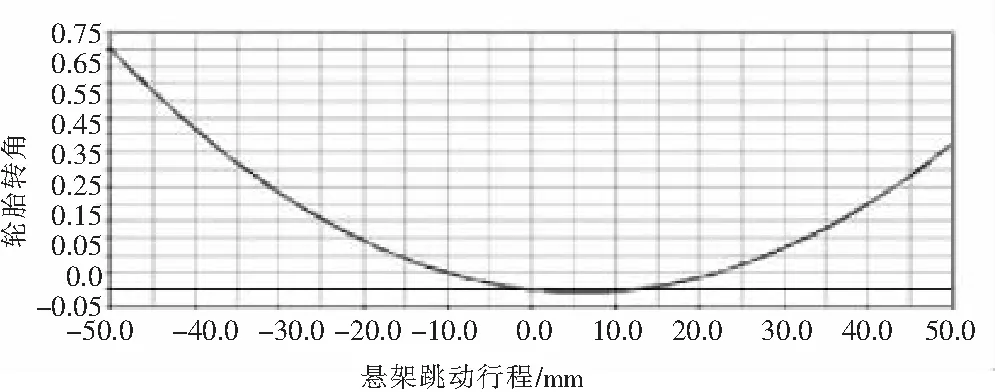
图2 第一轴转向角(平行轮跳)
保持方向盘输入角度为0°,进行轮胎跳动量为50 mm的反向轮跳仿真。从图3可知:①车轮跳动会产生轮胎转向。②在轮跳量0 mm时轮胎向左转角为0.1°,在轮跳量50 mm时轮胎向右转角为0.2°。

图3 第一轴转向角(反向轮跳)
1.2 第二轴悬架K&C特性研究
建立第二轴(第三、四、五轴动力学模型与第二轴一致)悬架转向Simpack模型(见图4),保持无轨导向输入角度为0°,轮胎上跳50 mm,下跳50 mm进行平行轮跳仿真。

图4 第二轴悬架
从图5可知,车轮平行跳动不会造成轮胎转向。

图5 第二轴转向角(平行轮跳)
保持无轨导向输入角度为0°,进行轮胎跳动量为50 mm的反向轮跳仿真。从图6可知,车轮反向跳动造成轮胎转向角非常小,影响可忽略。
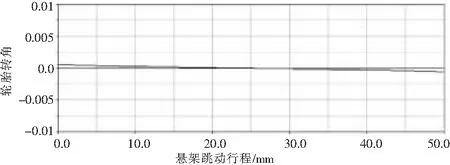
图6 第二轴转向角(反向轮跳)
1.3 第六轴悬架K&C特性研究
建立第六轴悬架转向Simpack模型(见图7),保持无轨导向输入角度为0°,轮胎上跳50 mm,下跳50 mm进行平行轮跳仿真。

图7 第六轴悬架
从图8可知:①车轮跳动会产生轮胎转向。②平行轮跳时轮胎基本为向左转向。③在轮胎下跳50 mm时轮胎转角为0.9°,在轮胎上跳50 mm时轮胎转角0.2°。
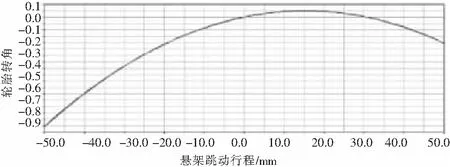
图8 第六轴转向角(平行轮跳)
保持无轨导向输入角度为0°,进行轮胎跳动量为50 mm的反向轮跳仿真。从图9可知:①车轮跳动会产生轮胎转向。②在轮跳量0 mm时轮胎向右转角为0.1°,在轮跳量50 mm时轮胎向左转角非常小,影响可忽略。
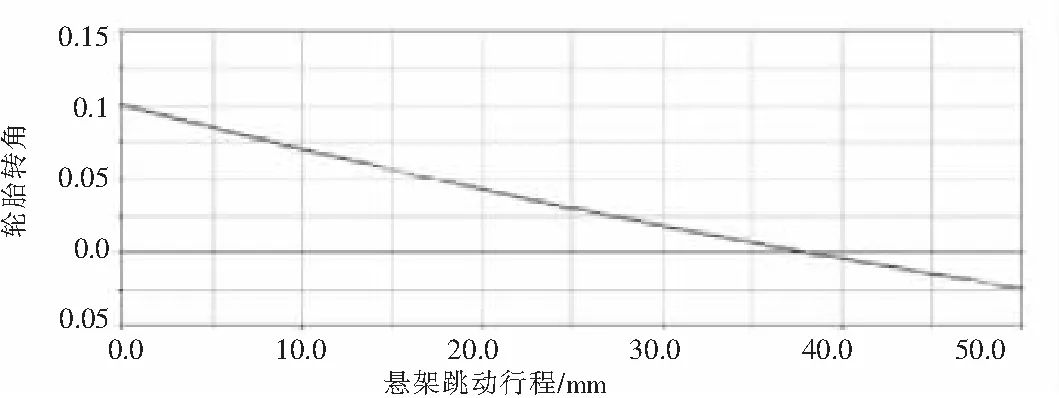
图9 第六轴转向角(反向轮跳)
1.4 悬架K&C特性优化改进
通过对以上六轴悬架转向K&C特性研究表明,车辆左、右车轮经过同等大小的路面激励时(典型工况是过减速带,等同于平行轮跳),其中第一轴车轮相对之前时刻状态向右转向,第六轴车轮相对之前时刻状态向左转向,第二、三、四、五轴车轮与之前时刻状态保持不变,最终导致智轨电车较之前时刻状态向右跑偏,跑偏程度与激励大小成正比。
车辆左、右车轮经过不同大小的路面激励时(典型工况是单侧车轮过凹坑,等同于反向轮跳),其各轴车轮转角变化较小,对智轨电车直线行驶影响较小。
为此针对第一轴与第六轴悬架进行悬架与转向硬点优化,利用Simpack Insight进行平行轮跳转向角灵敏度分析,找出灵敏度最大的几个硬点进行优化设计,优化后结果如图10、图11所示。
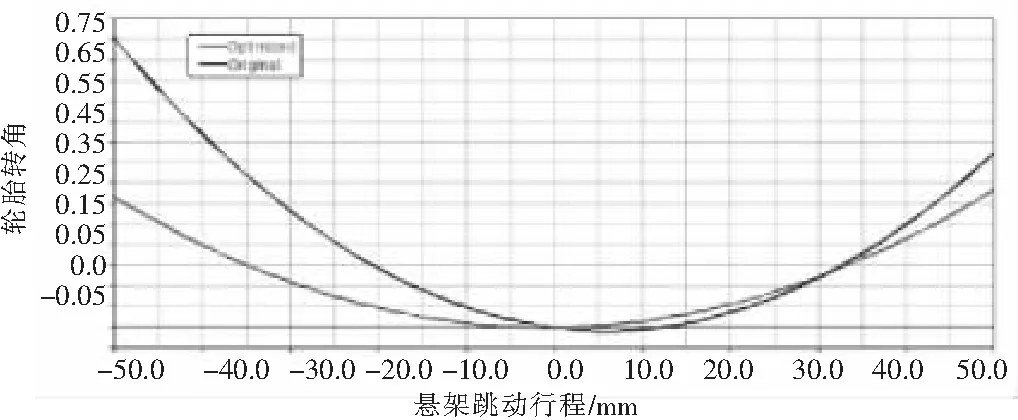
图10 第一轴转向角(平行轮跳)
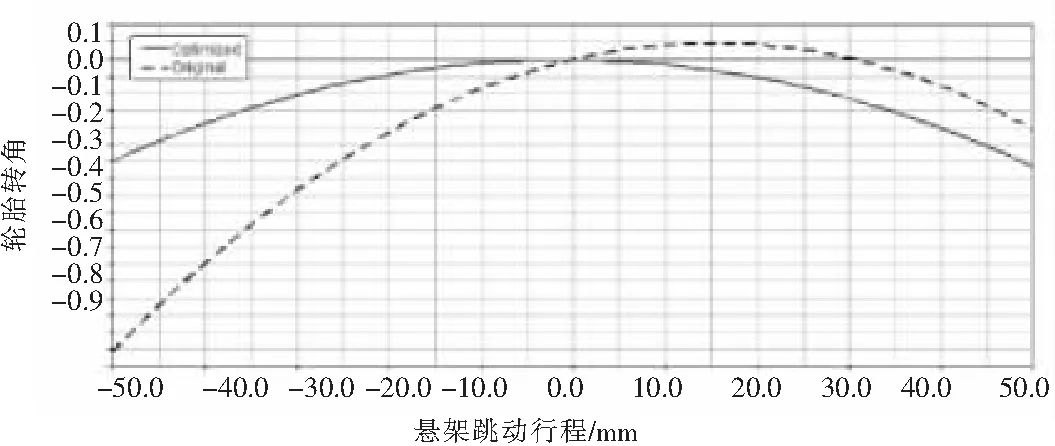
图11 第六轴转向角(平行轮跳)
2 底盘参数及传感器零位研究
车轮定位角、车轴偏斜、气囊高度及车轴角度传感器零位等参数不正确将影响车辆直线行驶性能。
2.1 车轮定位研究
由于智轨电车是双向驾驶车辆,其所有车轮满载前束值设计为0 mm/m,但实际前束(见图12)受负载及装配精度影响,其前束值不等于设计值,前束值呈负值时,使车轮产生朝外侧方向运动的趋势,前束值呈正值时,使车轮产生朝内侧方向运动的趋势。过大正/负前束均会造车轮侧滑,左右轮前进方向不一致将影响车辆直线行驶性能。

图12 前束示意图
车轮外倾角呈正值时(见图13),使车轮产生朝外侧方向运动的趋势,前轮外倾角呈负值时,使车轮产生朝内侧方向运动的趋势。前轮外倾角需要与前束值匹配,由于满载前束值设置为零,车轮满载状态外倾角应为0°。
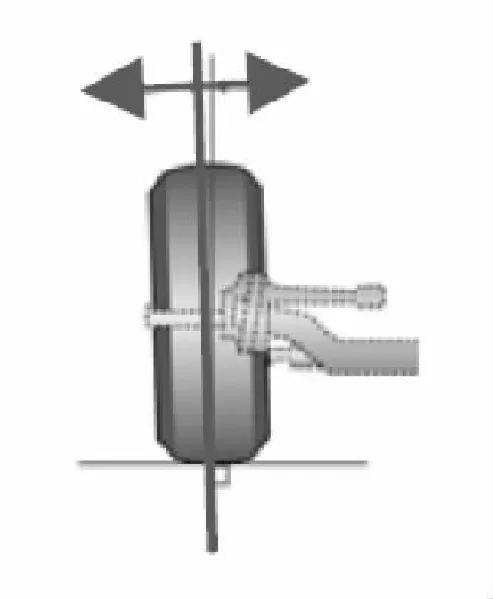
图13 车轮外倾角示意图
2.2 车轴偏斜研究
车轴偏斜将会直接影响车辆直线行驶姿态,使车辆偏斜直行如图14所示。

图14 车轴偏斜示意图
2.3 气囊高度研究
左右气囊同等高度误差对车辆直线行驶性能影响类似于悬架平行轮跳固定在某个轮跳高度,等同于车轮始终保持该状态下的转向角。另外左右气囊高度差对车辆直线行驶性能影响类似于悬架反向轮跳固定在某个轮跳高度,等同于车轮始终保持该状态下的转向角。
2.4 角度传感器零位研究
由于智轨电车各轴均是线控转向,角度传感器零位标定至关重要,传感器零位不正确,单节车将出现类似车轴偏斜后果,三节车将会导致“C”字型、“Z”字型姿态直行问题。
2.5 规范底盘调校与传感器标定
通过上述研究,底盘参数与传感器零位正确与否直接影响到智轨电车直线行驶能力。
在智轨电车现有调试工艺中增加车轮定位参数调整、车轴平行度(偏斜)调整、气囊高度调整及传感器标定等工序,如图15所示。
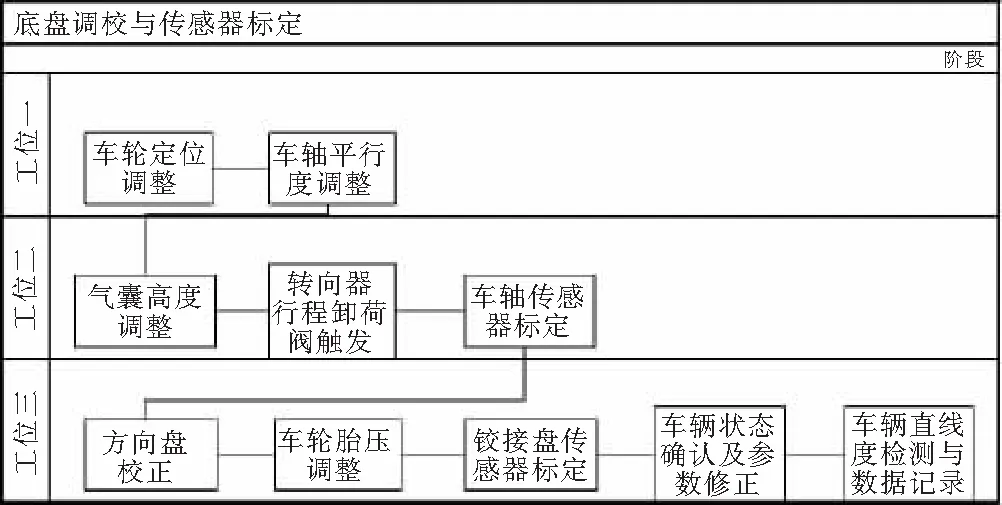
图15 底盘调校与传感器标定工序图
3 结语
本文通过对影响车辆直线行驶的悬架K&C特性研究,改善悬架K&C特性;通过对底盘参数及传感器零位研究,完善底盘调试工艺。从设计及调试工艺两方面提高车辆直线行驶能力,纠正车辆行驶状态。
