水平井牵引器驱动系统惯量辨识算法
2022-05-21刘镇江王桂宇杨留强
刘镇江,王桂宇,杨留强
中国石油集团测井有限公司辽河分公司,辽宁 盘锦 124010
随着水平井牵引器的广泛使用,使用者对牵引器的性能要求越来越高,从原来的仅仅只需要牵引器拖拽测井仪器在水平段爬行完成测井工作,到现在需要仪器完成的高精度定位爬行、变径爬行等复杂的动作。变径爬行过程中,由于驱动臂长的改变导致负载惯量变化[1],这样原本设置好的速度环PI参数可能将不再适用,从而导致系统出现振动[2]。因此,转速环的控制参数需要根据负载转动惯量的变化进行实时调整[3]。为了提高水平井牵引器驱动系统在变径爬行中的适用性和提高速度环控制器的性能,实时辨识系统转动惯量是十分必要的。
目前学术界主流的转动惯量辨识算法有离线的加减速辨识、在线的基于梯度校正辨识算法[4]和三阶最小二乘转动惯量辨识算法[5]。离线的加减速辨识算法简单,但是受限于给定指令反馈计算的延迟以及外部工况变化等因素,实际使用场景较为受限,不太适合牵引器的现场使用,在线基于梯度校正辨识算法和三阶最小二乘转动惯量辨识算法虽然可以很好地实现动态惯量辨识但是引入了多阶矩阵运算,增大了算法复杂度,不利于在现有的硬件平台实现。
为解决传统转动惯量辨识方法的实际工况受限、辨识收敛时间长和有效数据选择复杂等问题,笔者提出了一种基于最小二乘法自动数据筛选的在线转动惯量辨识方法,并引入了遗忘因子、置信度函数,有效地提高了转动惯量的在线辨识速度和准确度,减小了算法的计算量。另外,该方法可以实现伺服驱动器的转速环控制器参数自整定。
1 算法设计
忽略电机内部的机械摩擦损耗,永磁同步电机的机械动力学方程如式(1)所示[6]:
Jsω+Bω=Te-TL
(1)
对电机的机械动力学方程进行差分离散化处理,得到一阶转动惯量辨识递推结构如下:
(2)
(3)
由于负载转矩变化相对机械转速变化缓慢,可以认为其在相邻2个采样间隔内负载转矩没有发生变化,并且忽略摩擦系数的影响,由式(2)和式(3)可得:
(4)
式中:J为系统惯量;ω(k)为电机在k时刻的机械角速度;B为系统摩擦系数;Te(k)为电机在k时刻的输出电磁转矩;TL(k)为电机在k时刻的负载转矩;Ts为惯量辨识的算法执行周期。

(5)
bg(k)=bg(k-1)+m(k)·l(k)[y(k)-ΔTe(k)bg(k-1)]
(6)
(7)
式中:l(k)为第k时刻的修正增益;p(k)为第k时刻的协方差系数;bg(k)为第k时刻的辨识量;m(k)为第k时刻的置信度值。
相对传统的最小二乘法辨识系统惯量的算法,该设计引入遗忘因子λ,其作用是减小历史数据对当前数据的影响,提高辨识算法的动态响应性能,一般取0.95~0.999。对获取的数据用式(5)、(6)、(7)进行处理,从而得到系统的转动惯量辨识结果。
2 算法步骤
为了进一步提高最小二乘转动惯量算法的动态响应速度,引入以下新型置信度函数,对输入数据进行自动筛选,表达式如式(8)所示:

(8)
式中:α为置信度系数。
算法具体步骤如下:
步骤1 获取驱动系统电磁转矩和反馈机械角度。电磁转矩通过电流采样电路和坐标变换得到转矩电流iq,再乘以力矩系数后得到电磁转矩;机械角度则由编码器反馈获得。
步骤2 计算同步机械转速和电磁转矩。机械转矩由机械角度差分获得;通过对获得电磁转矩进行均值滤波来进行相位延迟,从而获得与机械转速同步的电磁转矩信号。
步骤3 基于置信度函数的一阶最小二乘转动惯量辨识算法,根据式(8)计算置信度函数值,对有效数据进行筛选;利用自动数据筛选和递推公式(5)、(6)、(7)对转动惯量进行实时辨识。
增加置信度函数对输入数据进行有效筛选可以确保在使用最小二乘法时输入数据源的有效性,提高惯量辨识系统的精度。
3 算法仿真模型
基于前面的理论分析,利用MATLAB/Simulink建立伺服电机及其转动惯量辨识算法的仿真模型。图1为电机驱动的三闭环整体仿真模型框图,该模型中除去电机的基本三环控制外,还增加了转速转矩信号同步处理模块和转动惯量辨识模块。这2个模块的作用是为了辨识系统惯量的大小,最终目的是为了调整速度环相关的PI参数,实现牵引器在爬行过程中出现负载惯量变化时的稳定运行。

图1 电机驱动系统的三闭环整体仿真模型
图2为信号同步模块Simulink执行框图,图2(a)为转矩信号同步处理,图2(b)为速度信号同步处理。对处理后的同步信号做了平滑处理(低通滤波)。
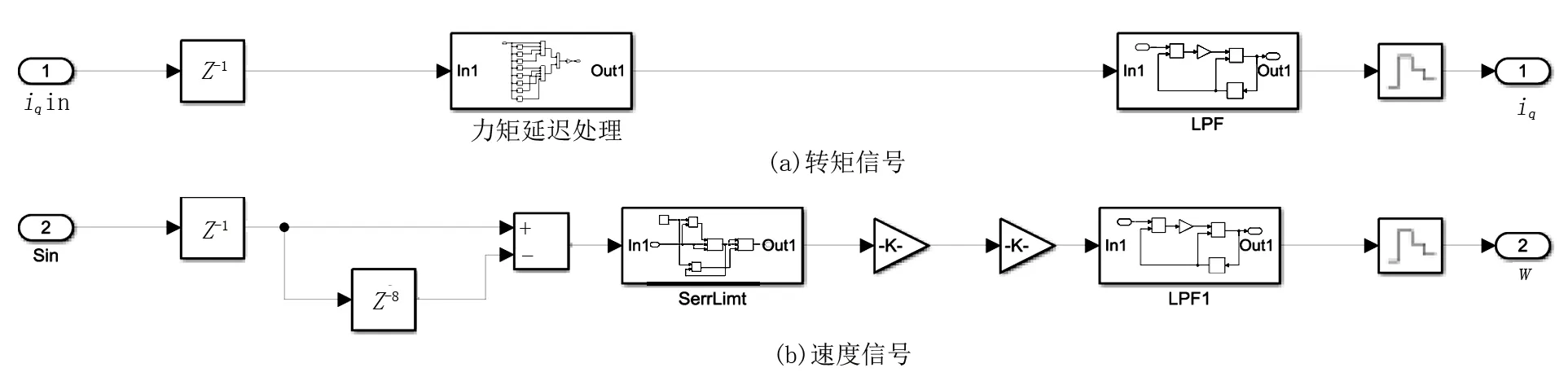
图2 信号同步模块Simulink执行框图
信号同步处理模块主要实现对输入的力矩信息和位置信息进行同步化处理,得到同步后的力矩和转速。同步转速与转矩作为转动惯量辨识模块输入。驱动系统的力矩信息是通过ADC采样电机三相相电流,并经过坐标变换得到转矩电流iq,将iq与电机力矩系数相乘即可获取电机实时转矩;伺服电机的转速信息通过位置反馈装置得到。
图3为带遗忘因子的最小二乘算法[7]在Simulink中具体执行过程,模型输入为同步后的转矩电流与电机机械角速度,来源于图2同步模块的输出。通过输入值计算转矩差值和速度的二阶差值,然后按照置信度函数计算、修正系数计算、计算协方差系数和辨识系统估算量的顺序依次计算,迭代推算出较为精准的惯量值。
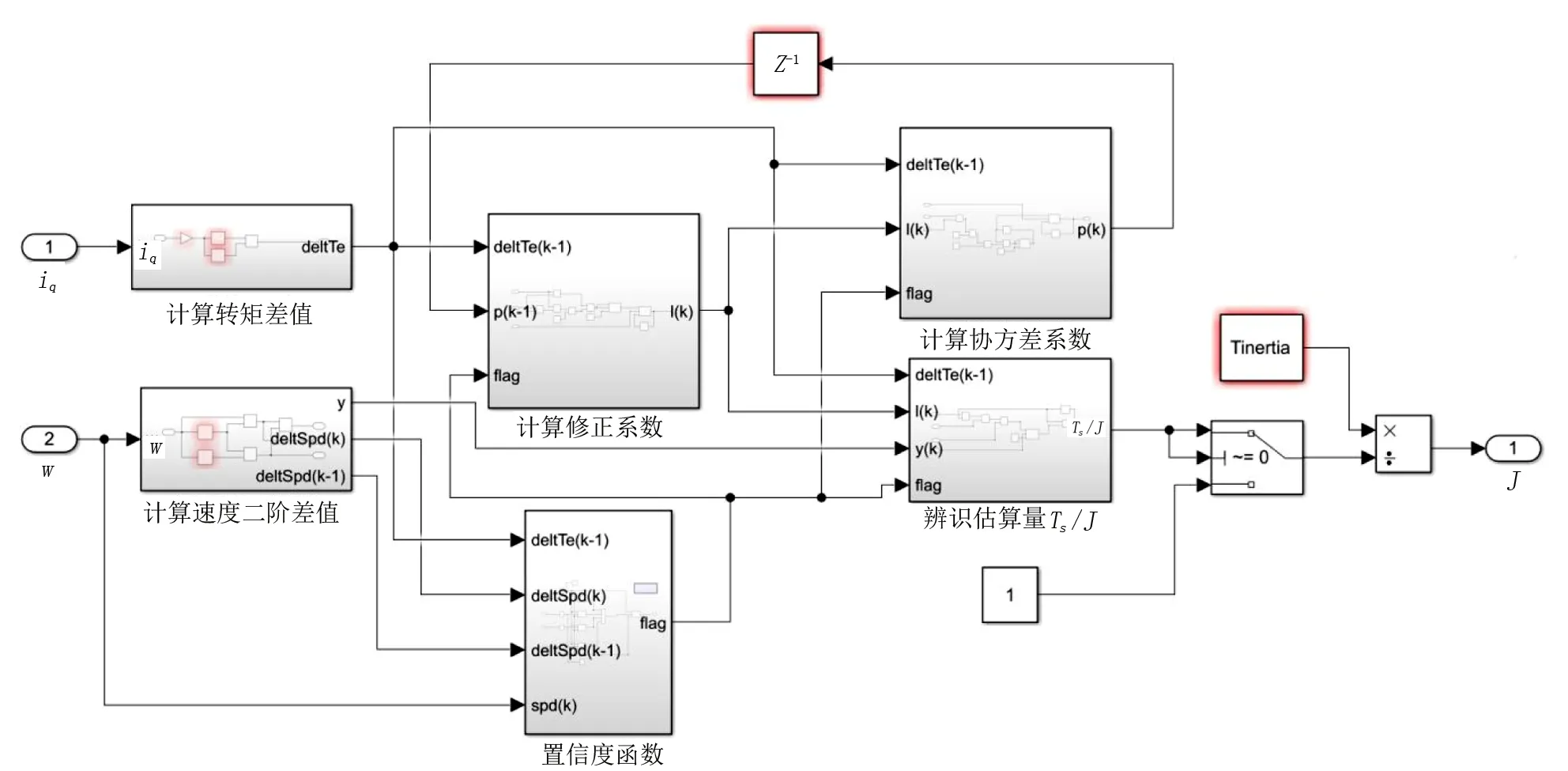
图3 带遗忘因子的最小二乘算法Simulink执行过程
4 算法硬件平台的搭建
该系统的硬件框图如图4所示,基于TMS320F28335控制器开发相对应的FOC电机的位置转速和电流的三闭环控制系统软件[8],通讯接口使用德国倍福公司改进型的工业以太网总线EtherCat接口[9,10],该接口有效地解决了传统现场总线多机通讯时候的延时问题,可以更好地满足牵引器在多电机驱动时候的同步性[11-13]。
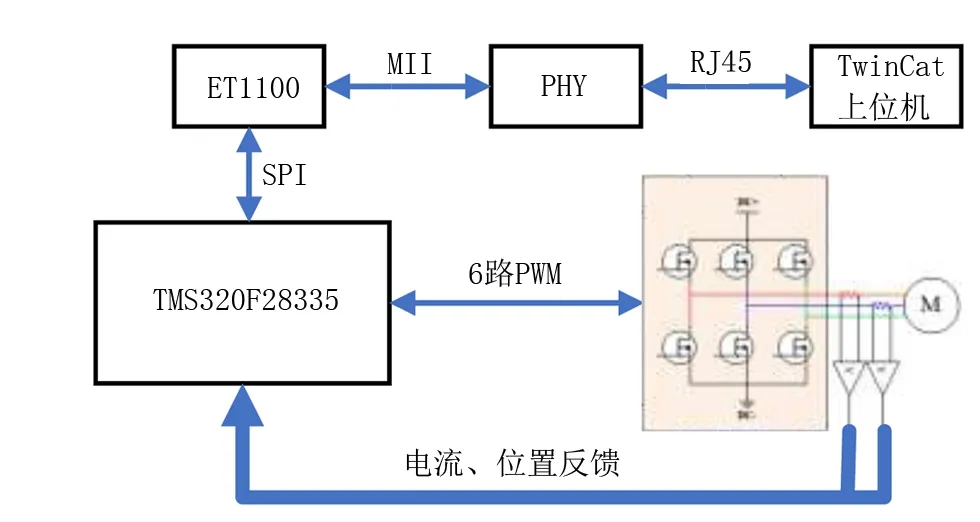
图4 控制系统硬件实现框图
在MCU应用层软件中配置好PDO实现转速、电流、转动惯量等相关参数;主站软件开发使用VS2015软件(在其基础上安装倍福公司开发的Twincat3.0组件),使用插件中软PLC编程,利用Scope插件实现PDO报文的曲线显示方便对算法的性能进行测试[14-16]。
转动惯量辨识算法的执行周期为电流环控制周期的20倍(1ms,电流环控制周期为50μs)。由于CPU电流环算法中要进行park、Clark坐标变化、D轴电流环PI运算和Q轴电流环PI运算,这些运算需要开销较多的资源和较长的时间,为了让所添加的惯量辨识算法不影响电机本体的FOC算法,故惯量辨识算法采用状态机的方式实现。即每50μs计算部分惯量辨识算法,20次(1ms)计算完成一次最小二乘迭代运算,惯量在线辨识算法在DSP 28335控制器中具体执行流程图如图5所示。
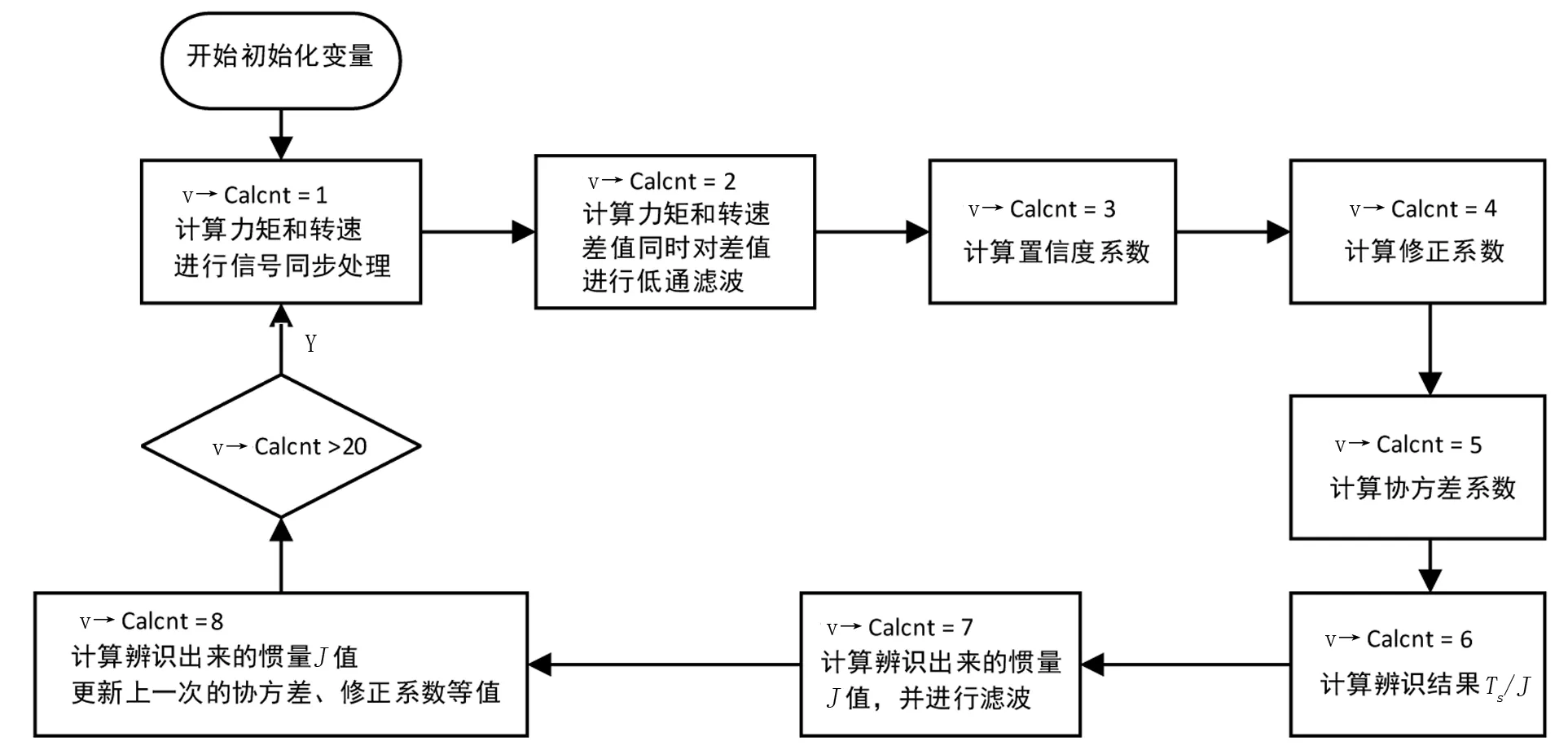
注:v→Calcnt表示为惯量辨识算法所执行的次数。
待系统开始运行后初始化相关变量,每一次电流环运算结束后调用惯量辨识算法代码,该部分代码根据v→Calcnt的值进行不同状态运算,具体分布如图5所示,将原本需要耗时较长的算法代码均匀地分解在每一个电流环中,这样可以有效地解决CPU运算能力不足的问题,提高了软件系统的健壮性。
5 系统实现
图6为控制系统的是硬件实验平台。包含基于VS2015的TwinCat3.0上位机调试系统、伺服驱动控制器、电机以及电源系统。
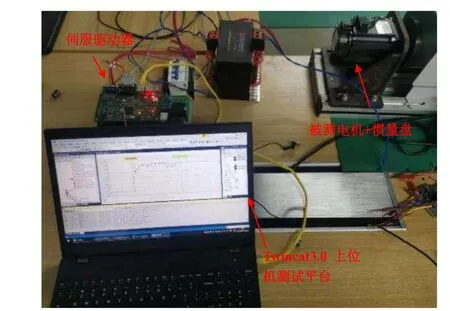
图6 控制系统硬件实物
图7为在Simulink下对5倍惯量辨识算法迭代的过程数据,横轴为时间轴,纵轴为惯量辨识的结果值,图7(a)设置电机本体惯量为1.66×10-3kg/m2,稳定时结果1.602×10-3kg/m2,辨识精度达到96.5%;图7(b)设置电机本体惯量为6.66×10-3kg/m2,稳定时结果6.942×10-3kg/m2,辨识精度达到95.76%,算法中遗忘因子系数值为0.99。

图7 Simulink惯量辨识结果图
图8为通过EtherCat接口在硬件平台下监视惯量辨识的过程数据曲线,数据采样率选择为1ms每个点,图8(a)为辨识一号惯量盘EtherCat接口打印的过程曲线,图8(b)为辨识二号惯量盘EtherCat接口打印的过程曲线,硬件平台上设置的遗忘因子系数与仿真相同为0.99。
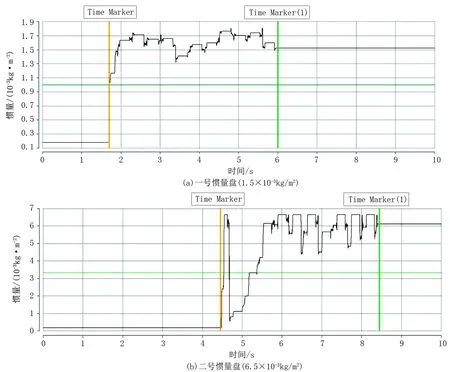
图8 Ethercat接口在硬件平台下监视惯量辨识的过程数据曲线
表1为使用EtherCat接口对不同负载惯量条件下的惯量值进行测试的结果。测试是在310V母线下进行,软件代码中设计遗忘因子的值为0.995,一号惯量盘为1.5×10-3kg/m2,二号惯量盘为6.5×10-3kg/m2,电机本体惯量0.16×10-3kg/m2。可以发现,在硬件平台下辨识结果与仿真结果接近。

表1 不同负载惯量条件下的惯量值进行测试结果
以上结果表明,该算法能够以较快的时间和相对较高的精度辨识出负载惯量大小,满足牵引器驱动系统的需求。
6 现场应用
利用转动惯量辨识算法理论基础,设计制造了牵引器电机驱动系统,配套自适应推靠系统,完成了整体牵引器的研制。目前该牵引器已在辽河油田投入生产应用,2020年完成水平井固井质量测井60余井次,应用效果良好。
6.1 曙4-H**水平井
井身结构为直井段3400m,水平段550m,套管尺寸7in。该井水平距离长、井底仰角大,牵引器不仅要克服电缆与管壁的摩擦阻力,还要克服仪器串重力分力,根据理论和经验确定采用三级驱动,提供总牵引力6000N,能够完成牵引需求。仪器串自由下放到3500m,遇阻,上提20m启动牵引器输送。液压推靠压力设置3MPa,总电流控制在900~1100mA,为减小牵引器遇到障碍的冲击,牵引速度控制在6m/min。仪器牵引到3800m(井斜95°)井段,电流降至900mA以下,表明牵引器出现打滑,此时惯量辨识系统扭矩和速度反馈起到提醒作用。调节液压推靠压力至4MPa,电流增至1300mA以上,牵引速度控制在5m/min左右,扭矩增大,速度下降,此时惯量辨识系统扭矩和速度反馈起到保护驱动电机作用。井底位置井斜增加至105.76°,提升液压推靠至 5.2MPa,牵引速度降至4m/min。在整个牵引过程中,采用了惯量辨识方法的电机驱动系统,一直在精准和快速反馈井筒内响应,既能保护驱动电机又能提供足够的牵引力,给操作工程师直观感受和准确判断井下仪器状况。经过6.2h输送,将测井仪器输送到井底15m,顺利地将CBL/VDL测井仪器送至目的层,完成了固井质量测井施工。
6.2 雷99-高H*井
测量井段4415m,最大井斜102.4°,套管尺寸139.7in,内径121.36mm,仪器MAK-2外径尺寸110mm。牵引器采用三级驱动,采用上述工作制度,推靠力分别调为3、4和5MPa,驱动速度做相应的调整。采用惯量辨识方法的电机驱动系统,在牵引驱动过程中,系统响应速度快速,牵引作业顺利,作业时间11.3h,将测井仪器输送到井底16m,顺利地将MAK-2水泥密度仪器送至目的层,完成了水泥密度评价测井。作业完成后牵引器从井下取出,观察仪器驱动齿轮磨损较轻,说明推靠力和牵引驱动力间的配合较好。牵引器电机驱动系统惯量辨识算法优化了牵引力和速度关系,可以有效避免驱动电机过载,同时也减少电机无效的转动和牵引齿轮的磨损,节约作业成本。
