基于深度学习的新能源变电站设备检测模型研究
2022-05-21李福龙,马孝栋,魏春雷,王天慧,陈洲生
李福龙,马孝栋,魏春雷,王天慧,陈洲生

[摘 要]新能源发电行业正朝着无人值守、少人值守的方向发展,变电站智能机器人巡检方案通过整合不同的技术来实现这一目标,从而替代运维人员执行对站内室外高压设备的巡视检查、对电表数值的现场读取、对电力设备运行数据的实时采集等任务,并预测可能发生的故障,旨在为巡检机器人提供电力设备自主识别能力,模拟人工巡检中对各种设备进行定制化检查,涉及的设备类型有变壓器、断路器、互感器、隔离开关、仪表、阀门等。鉴于变电站现场环境的复杂性,提出了一种基于深度学习的实时设备检测模型。结果表明,该模型的平均精度在90%以上,验证了该设备检测模型的实用性,并展示了其在巡检机器人系统上的应用潜力。
[关键词]电力巡检;机器人;目标检测;设备识别
[中图分类号]TM50 [文献标志码]A [文章编号]2095–6487(2022)02–0–04
Research on the Equipment Detection Model of New
Energy Substation Based on Deep Learning
Li Fu-long,Ma Xiao-dong,Wei Chun-lei,Wang Tian-hui,Chen Zhou-sheng
[Abstract]The new energy power generation industry is developing in the direction of unattended and few people on duty. The intelligent robot inspection solution for substations achieves this goal by integrating different technologies, thereby replacing operation and maintenance personnel to perform inspections and inspections of high-voltage equipment inside and outside the station, on-site reading of meter values, real-time collection of power equipment operating data and other tasks, and prediction of possible failures. This article aims to provide the inspection robot with the ability to independently identify power equipment, and to simulate the customized inspection of various equipment during manual inspections. The types of equipment involved in this research include transformers, circuit breakers, transformers, isolating switches, meters, and valves. In view of the complexity of the substation site environment, we propose a real-time equipment detection model based on deep learning. The results show the remarkable performance of the model, with an average accuracy of more than 90%. This work verifies the practicability of the equipment detection model and demonstrates its application potential in the inspection robot system.
[Keywords]power inspection;robot;target detection;equipment recognition
现阶段新能源变电站巡检主要是以人工巡检为主,部分设备的自动监测为辅。为确保站内设备安全稳定运行,站内会设置日常巡视检查制度,运维人员通过定期巡视检查关键设备的有无异常情况,从而判断设备是否正常运行,及时掌握生产运行中的异常情况,并采取相应处置措施,对于降低电力事故的发生概率和严重程度具有非常重大的意义。因此,变电站需要参考变电设备的实际运行工况,同时结合过往处置设备异常、故障和缺陷的教训和经验,制订详尽的检查方案。在这些背景下,管理所有可用的信息,评估设备的运行状态并及时做出处理异常操作的决策是极其困难的。因此,需要一种有助于防止人为错误的手段,并阻止可能将小事故转变为灾难性故障的连锁反应。智能巡检机器人被认为是完成这些任务的最佳替代者,通过分析设备当前数据并生成设备状态评估来实现这一需求。当前机器人的技术水平也完全能够有效执行这些任务,包括自主导航、探索危险或者无法进入的区域、可以在机器人上安装各种传感器、快速分析传感器数据、执行任务的成本和时间相对较低。
在进行人工巡检时,值班人员不仅要熟悉待检设备的基本情况,同时也要了解该设备的历史运行状态。对于巡检机器人来说,监控后台可以为其提供所需的信息和设备历史记录,但巡检机器人还需要一项非常基本的能力从而替代人工巡检作业,那就是检测和识别环境中待检的设备。本文主要在无人值守的背景下,提出了一种基于深度学习的电力生产现场设备检测方法,回顾了当前国内外巡检机器人技术现状,详细阐述了巡检机器人目标检测策略,基于深度学习的设备检测模型的开发和评估给出了本项工作的结论和未来的展望。
1 国内外发展现状
现代机器人技术是计算机科学和网络通信技术的集大成者,在过去十年中,由于机器人对这类重复且存在安全隐患的工作的兼容性,在工业领域使用机器人执行巡检任务越来越普遍。自2013年开始,道达尔公司组织了一项ARGOS挑战赛,主题为创造一个服务于油气站点的自主机器人。这次比赛分3轮进行,通过这3轮回合,机器人需要自主完成监视任务,检查各种视觉检查点,如压力表和阀门,并监测场区的热点、气体泄漏和声音信号。在电力行业,张浩杰等开发了一套变电站巡检机器人系统,他们使用了一个配备电磁传感器、RFID阅读器、摄像机、激光雷达传感器、红外热成像仪和定向麦克风的四轮机器人。机器人跟随磁性标记作为巡检任务的检查点。对于该系统,需要为巡检机器人定义巡检点,以便使用正确的传感器执行检查任务。本文的目标是使巡检机器人具有设备识别能力,从而获得更高的感知优势,这一点的重要性已经在实际项目中得到证明。人工巡检过程中,巡视人员能够识别设备类型,并在此基础上决定该设备的检查项。例如,在检查电力变压器时,巡视人员需要查看变压器的油温与油位表,并检查变压器外表有无异常。如果巡检到线路时,巡视人员会目视检查线路,特别是连接处,使用热成像仪检测电缆温度。该变电站智能机器人巡检系统可以实时跟踪变电设备的历史数据,并将这些信息提供给巡检机器人,以方便巡检工作。同样,巡检机器人也会将日常设备巡检信息发送到后台服务器。
2 机器人巡检方案
2.1 总体框架
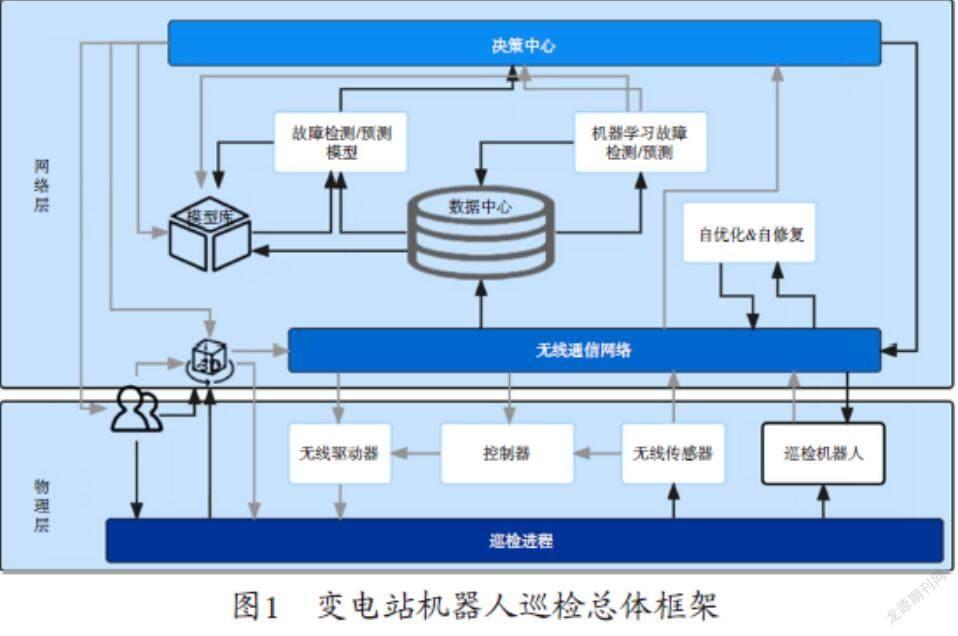
新能源变电站智能巡检机器人系统是一种面向巡检过程的智能监控解决方案,利用无线传感器网络、5G通信、协同控制、智能决策框架、机器人等技术优势,确保巡视检查工作高效完成。该方案的总体框架如图1所示,结构采用模块化设计,由6个主要模块构成,包括完整的系统模型和协同控制、海量连接弹性网络通信、基于机器学习的缺陷检测和预测模型、智能自适应决策模型、三维数字化电站和自主巡检机器人。该框架分为物理层和网络层,物理层包括巡检过程本身、无线传感器和驱动器、物理控制器和巡检机器人,网络层包括无线通信网络、数据中心、缺陷检测和预测算法以及决策框架。
作为机器人巡检系统的核心组成,智能决策框架应基于变电设备的运行状态向值班人员提出建议,同时根据当前情况定义机器人的后续任务,继续日常巡视工作或其他更具体的工作任务。巡检机器人的主要任务是在变电站内巡逻,发现系统能力范围内的异常情况(日常巡检)。
2.2 巡检策略
本文提到的巡检机器人是一种小型的轮式机器人,集成了红外及可见光镜头、二维激光测距仪、声学和气体传感器,广泛适用于电厂GIS室、主变室、配电房或其他适于人工作业区域的巡检任务。传感器种类是根据实际工作环境下的巡检任务的需求来配置的,同时机器人可能需要在配电室和输电线路周围机动,机器人的尺寸也应适合在这种環境中使用。现阶段变电站内的日常巡检工作通常由站内值班人员执行,在一定程度上能够高效地完成这些任务,但存在巡检效率低、耗时长、巡检质量不可控、人员工作强度高、人身安全不能保障等问题。因此,对巡检机器人的需求很清晰,那就是让机器人履行巡视人员的职责,提高巡检效率和电站运行可靠性。
由于一般的任务都是有针对性的,对不同类型的设备应当制定不同的检查项和判断依据。复杂电磁环境下,机器人的定位精度存在较大偏差,获取的动态画面也并非完全一致的,仅定义设备的位置不足以让机器人完成巡检任务。因此,巡检机器人需要具备目标检测的能力,才能够有效地执行自主巡检任务。本文研究的巡检策略体系中,首要任务是设备类型的检测,选取了六种电力设备,包括变压器、断路器、互感器、隔离开关、阀门和仪表,这些设备都是新能源变电站中最常见的类型。巡检机器人根据设备类型决定需要执行的巡检任务清单,每种类型的设备需要使用不同的传感器,需要执行不同的检查清单。
3 目标检测算法
3.1 算法设计
基于设备识别的机器人巡检系统需要一个实时目标检测方案来满足任务需求,设备识别过程包括图像中目标的分类和定位。在此之前,目标检测领域最主流的算法一直是R-CNN系列,拥有超高的检测精度高和双结构(two stage)的特性,但它的检测速度并不能满足移动巡检的需求。YOLO系列算法的网络结构则具有单阶段(single stage)的特点,不再需要过去多步骤才能完成的目标检测。 YOLOv3版本继承了系列算法优点,骨干网络更新为darknet-53网络结构,在兼顾实时性的同时保证了目标检测的准确性,同时支持多尺度目标检测。
算法设计实现分三个阶段进行:数据集收集、模型训练和结果验证。数据集的采集有两个目的,对某光伏发电项目升压站内的变电设备图像数据集进行采集和标注。在对图像进行人工目视检查并确认其正确性和质量后,标注设备类型。该数据集被分为训练和验证两部分数据,整个数据集为1 900张图像,训练数据占比全部数据的80%,剩余的20%为验证数据。对结果数据集的目视化检查显示了多种相关挑战,如照片模糊、尺度变化、遮挡和背景杂波。
本文使用了部分预训练权值作为初始训练模型以加快模型训练进程,训练过程使用GPU和CPU同时进行。在训练过程中,对损失函数进行了全程监控,YOLOv3使用实际输出值和样本标签值之间的方差和误差来计算损失值。损失函数由三部分损失组成,分别是:坐标预测、置信度预测、类别预测,最终的损失值是这些值的总和。在模型巡检过程中,使用验证数据集周期性的进行模型效果验证。
训练后的模型应达到一定的检测精度以满足巡检任务的预期,通常使用PASCAL VOC评估指标来评估目标检测模型的分类和定位性能。第一个指标是精准度,其计算方法是正确识别的样本数和被识别的样本(包括正确的和错误的)总数之比,该指标用来衡量检测模型将样本正确识别的准确性。第二个指标是召回率,计算方法为被正确识别的样本数与正确样本总数的比值,该指标用来衡量模型检测正确样本的能力。第三个指标则是交并比(intersection-over-union),即模型预测的边界框与数据集中标记的边界框的交叠率。平均正确率(Average Precision)是另一个在目标检测领域非常流行的评价函数。其中,AP值可以被定义为在不同召回率下最大精准度的平均值,mAP(Mean average precision)则是所有类别的AP平均值。本文则增加了另一种评价目标检测模型准确性的指标,那就是F1score,计算方法为精准率和召回率的调和平均值,同时考虑了目标检测模型的精准度和召回率,其中F1score取值范围是0到1,1代表最佳值(精准率和召回率达到完美状态),0代表最差值。
3.2 性能评价
为了验证和监控模型的性能,在训练过程中使用验证数据集定期计算mAP值,这有助于确保设备检测模型在训练期间保持全局性能最优,避免出现过拟合或者欠拟合的问题。过拟合是指模型对训练数据集学习的太好,在训练数据集上表现良好,但在保持样本上表现不佳。相反,欠拟合是指模型不能充分学习问题,即使在训练数据集上也表现不佳。
边界框置信度的阈值是优化目标检测的一个重要的参数,置信阈值用于定义IoU,计算方法是“预测的边界框”和“真实的边界框”的交集和并集的比值。置信阈值为50%意味着接受那些边界框和真实目标重叠超过50%的检测结果为正确值。增加置信阈值会导致每个图像的边界框数量变少,降低置信阈值会导致检测结果中更多的边界框。
经过12 000次迭代后训练损失值和评价指标mAP的百分比(mAP值是在训练迭代期间计算的),在训练过程中损失值趋于稳定并且稳定收敛到一个小数值(0.087 5)表明模型训练找到了损失函数的全局最小值。该模型检测准确性验证的结果为91.6%(mAP)。
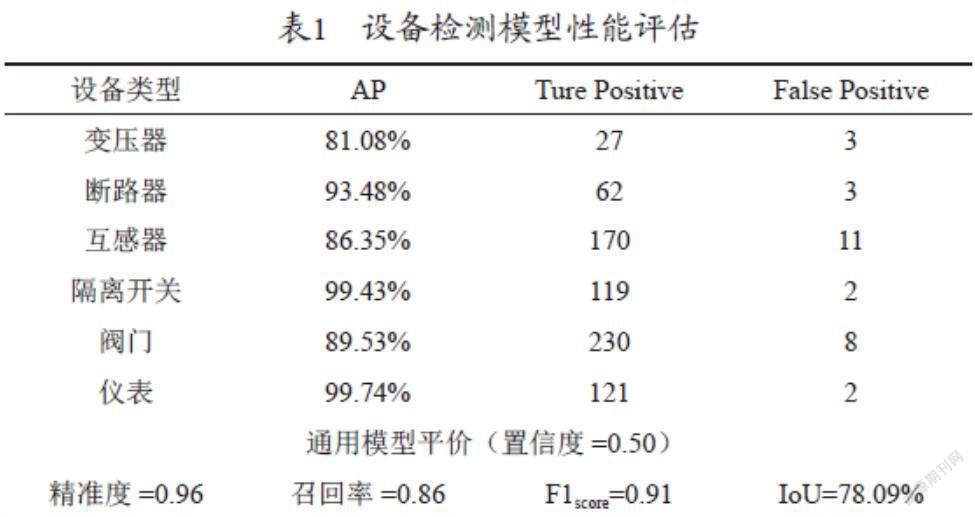
表1概括了每个类别和整个模型的评估细节,通常模型评估是在置信阈值为0.5时进行的,评估结果显示,模型精准度为0.96,表明了模型的可识别性,0.86的召回率表明該模型能够基本返回相关结果。F1score结合了模型的精准度和召回率,0.91的结果反映了设备检测模型整体性能的鲁棒性。交并比(IoU)显示为78.09%,表示预测边界框与标注边界框几乎重合。这些评价指标显示了该模型在变电站实际生产运行环境中检测设备的准确性。
上述评估结果表明,在变电站这种复杂的环境中,该模型依然能够检测不同类型的设备,且具有较高的准确性:①变压器和互感器两种类型的检测性能相对较低是由以下原因造成的。变压器的训练数据量最少,因此需要更多不同条件下的样本训练数据。②尽管互感器的样本数量第二高,但它代表了一个非常复杂的模型,可以有不同的大小和形状,因此在电力生产环境中通常存在其他类似的设备很容易被误分类为互感器。
4 结论
本文提出的设备检测模型以实际应用出发,基于YOLOv3算法实现,考虑准确性和实时操作的需求,同时对训练好的模型进行了评估,并对其性能进行了验证,定量和定性分析结果表明了该模型的准确性。未来更多电力设备类型将通过迁移学习技术纳入该模型,进一步增强电力巡检机器人的业务能力,实现大量无人值守的设施设备远程监控、告警,实现站内信息的自动采集、即时控制、智能调节、在线决策、人机协同等功能,提升信息化管理水平,提高维护、巡检和抢修的效率,提高安全保障管理水平。
参考文献
[1] 鲁守银,张营,李建祥,等. 移动机器人在高压变电站中的应用[J]. 高电压技术,2017,43(1) : 276-284.
[2] 高旭,王育路,曾健.基于移动机器人的变电站仪表自动识别研究[J].电网与清洁能源,2017,33(11):85-90.
[3] 李若宇,马天璞,冯俊瑞. 变电站自动巡检机器人设计[J]. 中国新通信, 2020, 22(8): 134-135.
[4] 黄山,吴振升,任志刚,等.电力智能巡检机器人研究综述[J].电测与仪表,2020,57(2):31-43.
[5] 翁智,程曦,郑志强.基于改进YOLOv3的高压输电线路关键部件检测方法[J].计算机应用,2020,40(S2):183-187.
[6] 蒋姗,孙渊,严道森,等.基于深度学习算法的航拍巡检图像的绝缘子识别[J].福州大学学报(自然科学版),2021,49(1): 58-64.
[7] LIU S,HUANG D. Receptive field block net for accurate and fast object detection [C]//2018.
[8] Haojie Zhang, Bo Su, Hong Meng.Development and implementation of a robotic inspection system for power substations[J]. Industrial Robot,2017(3):333-342.
[9] Ren SHaoqing,He Kaiming,Girshick Ross,et al. Faster R -CNN:Towards Real -Time Object Detection with Region Proposal Networks [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2017,39(6):1137-1149.
