钻机二层台推扶式排管机变幅机构优化研究
2022-05-18李联中颜子敏
李联中,颜子敏,杨 雷,于 芳,魏 荣, 赵 进
1中石化胜利石油工程有限公司物资装备管理中心 2四川宏华石油设备有限公司海洋技术中心 3中国石油青海油田采油三厂运行维护中心
0 引言
二层台钻具排放系统能够显著降低钻井过程中起、下钻作业时的立根排放作业强度,提高作业自动化水平和作业安全性。排管机作为实现管具排放的关键设备,其结构形式主要包括立柱式排管机、悬挂式排管机和桥式排管机,其中悬挂式排管机相对其他形式体积较小,重量较轻,经济性也更强[1]。
随着近年来国内石油生产一线的自动、信息化升级和更高安全生产要求的推进,二层台无人化和排管作业自动化的趋势愈来愈明显。面对国内大量在役钻机的二层台自动化改造需求[2-3],同时考虑到旧有钻机一般井架内部空间较小且二层台安装部位承载能力有限,以推扶式排管机为基础的自动化二层台排管系统凭借其在可行性和经济性上的明显优势,得到了快速发展。
变幅机构作为推扶式排管机管具取送的关键执行部件,其设计布置方案与驱动油缸的工作压力和机械结构的响应直接相关,进而影响到排管机整机的工作性能和经济性[4-7],故根据不同钻深和作业载荷大小选择不同的变幅机构设计方案十分重要。
本文以某型海洋修井机推扶式排管机为参考(已成功应用于某海洋平台,相关参考参数如表1所示),通过推扶式排管机构变幅机构运动受力特点的分析与优化,讨论油缸前置和油缸后置两种常见机构布置的载荷响应特点,为排管机变幅机构设计提供了参考。

表1 排管机性能参数
1 变幅机构布置与动力学仿真
图1为油缸前置和油缸后置两种油缸布置方案以及两种形式作业钳头相对变幅原点的轨迹,为控制研究变量,通过调节姿态控制连杆位置保证变幅过程中钳头轨迹基本相同,同时保证油缸与后主臂/机架的铰点具有相同的初始相对位置。

图1 排管机变幅机构布置图


图2 工况示意图
(1)
实际工作中常采用数值方法对复杂结构进行动力学分析[8-9]。本文通过ADAMS数值仿真软件,模拟忽略重力、惯性力和铰点摩擦的影响的准静态过程,可得到变幅机构主要承载部件在运动平面内的载荷响应,包含油缸驱动力F油缸,前后主臂的杆件最大轴力F前主臂/后主臂和最大弯矩M前主臂/后主臂和姿态控制连杆的最大轴F连杆。
如图3~图8所示,由于二层台取送工况钻杆倾斜导致的钳头载荷远小于井口取送工况,变幅机构各部件的载荷响应远小于井口取送工况,对各运动杆件的设计和油缸的选型影响极小,故在对两种机构布置形式的载荷响应研究中应以井口取送工况为主。该工况下,两种布置方案的油缸驱动力出现了不同的变化趋势,其中油缸前置形式F油缸随变幅行程L的增加单调下降,而油缸后置形式F油缸先增大后降低,前者F油缸最大值为后者的120%,但其波动值为后者的86%。后主臂轴力F后主臂两者具有相同的变化趋势且相同变幅行程下F后主臂相差不超过25%。两种形式油缸布置方案下,后主臂最大弯矩M后主臂都出现在油缸下铰点B与后主臂连接处,具有与F油缸相似的变化趋势,油缸前置形式下M后主臂最大值仅为油缸后置形式下的66%。前主臂载荷响应上,两种机构布置方案与M前主臂皆有相同的变化趋势,其中油缸前置形式F前主臂最大值远小于油缸后置形式,但M前主臂最大值前者较后者高22%。姿态控制连杆轴力F连杆最大值,油缸前置布置较油缸后置布置高45%。

图3 F油缸随变幅行程变化曲线图
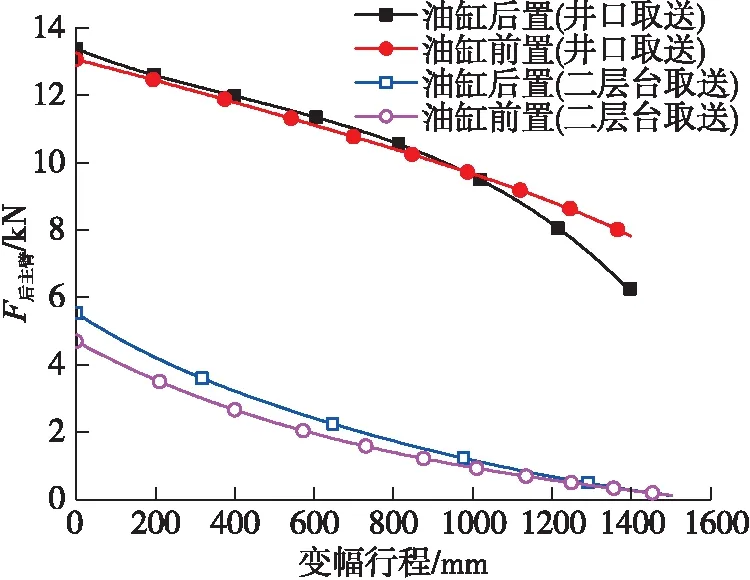
图4 F后主臂随变幅行程变化曲线图
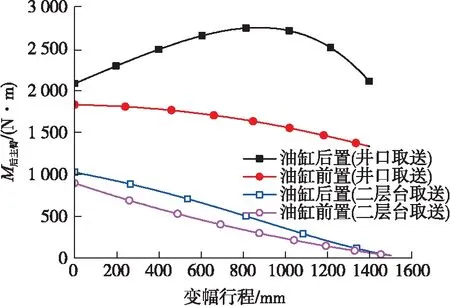
图5 M后主臂随变幅行程变化曲线图
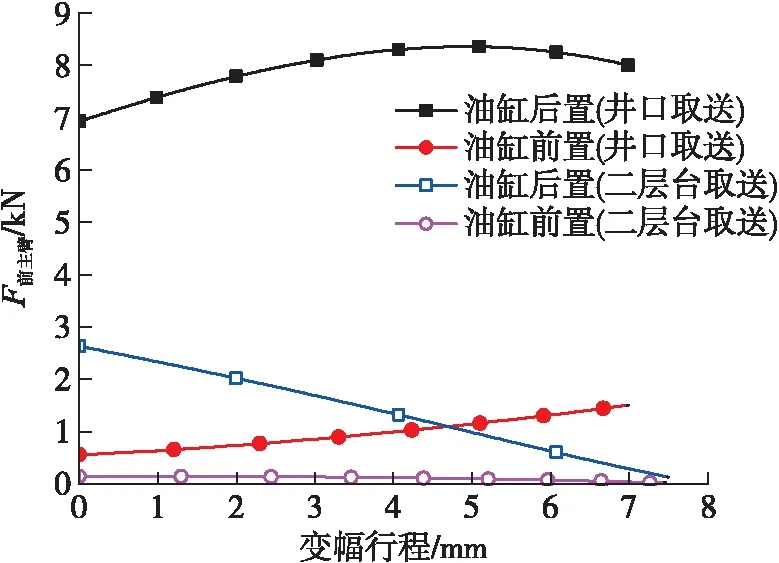
图6 F前主臂随变幅行程变化曲线图
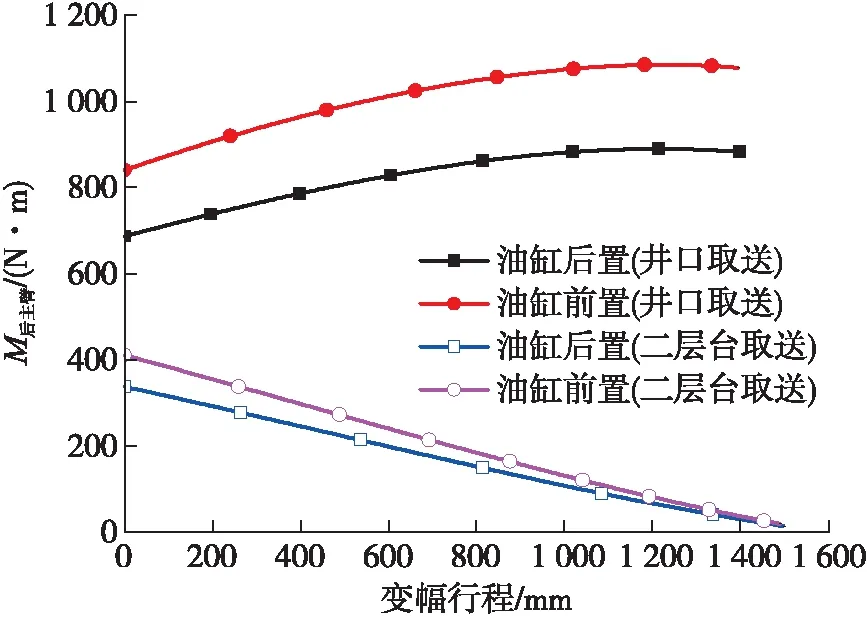
图7 M前主臂随变幅行程变化曲线图

图8 F连杆随变幅行程变化曲线图
2 驱动油缸布置点优化
综合前文,由于井口取送工况载荷较大,各部件的载荷响应远大于二层台取送工况,选取井口取送工况模型进行油缸铰点位置优化,在确保变幅动作轨迹不变的基础上,结合动力学以及经济性的要求[7,10-12],以F油缸的极大值最小[min(F油缸max)]和变幅机构M后主臂后主臂平面内最大弯矩最小[min(M后主臂max)]分别为优化目标进行分析,研究两种机构布置的优化方案。
优化变量分别为油缸上铰点A的水平和垂直坐标,下铰点B的垂直坐标。考虑到避免干涉和安装布置方便,设定铰点约束范围如下:
(1)油缸后置形式:
Ax∈(-100,100),Ay∈(-150,0),
By∈(-100,100)
(2)油缸前置形式:
Ax∈(-100,100),Ay∈(-150,0),
By∈(-100,100)
式中:Ax,Ay—上铰点相对优化前原始位置的x,y方向位移,mm;By—下铰点相对优化前原始位置的y方向位移,mm。
以最大油缸驱动力最小[min(F油缸max)]为优化目标时,优化后铰点位置如下:
(1)油缸后置形式:
Ax=100,Ay=0,By=-100
(2)油缸前置形式:
Ax=0,Ay=100,By=-100
如图9~图11所示,机构其他尺寸不变情况下,油缸铰点的变化仅影响油缸驱动力F油缸、后主臂最大轴力F后主臂和弯矩M后主臂。如图9所示,优化后油缸后置方案F油缸最大值降低了12%,波动值升高了6%,油缸前置方案F油缸最大值降低了21%,波动值降低了29%。两者对比优化后结果,前置方案较后置方案高约7%,但其F油缸波动值仅为后者的55%。

图9 优化后F油缸随变幅行程变化曲线图

图10 优化后M后主臂随变幅行程变化曲线图
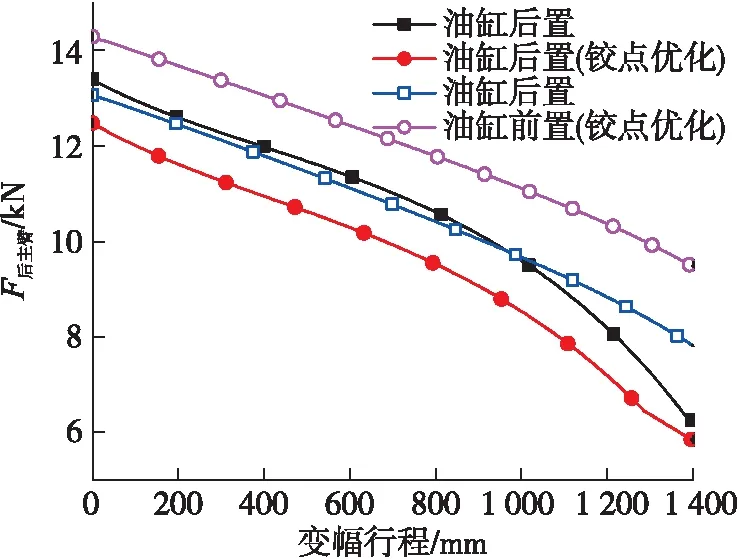
图11 优化后F后主臂随变幅行程变化曲线图
优化结果对M后主臂和F后主臂影响都较小,优化后结果都为原值的95%以上,其中优化后油缸前置的M后主臂最大值仍较油缸后置方案为低,仅为65%左右。杆件轴力变化较小,且对后主臂强度、刚度影响较小,对后主臂结构设计几乎没有影响。
当主臂平面内最大弯矩最小[min(M后主臂max)]为优化目标时,通过敏感度分析可以得到对应变量的敏感度。如表2所示,除油缸前置方案M后主臂max对By敏感度较高外,其余所选变量敏感度均较低,且优化计算变量变化方向与F油缸max优化基本计算一致,可视为在相同约束范围内得到相同优化结果,即给定的范围内M后主臂max基本不受铰点位置变化影响,机构布置方案起决定性作用。

表2 M后主臂max铰点优化设计变量敏感度
敏感度S定义为[13]:
(2)
式中:i、Q、V—分别为迭代次数,目标函数和设计变量。
综合优化设计结果,两种机构布置方案皆可通过铰点优化布置一定程度上降低油缸驱动力,其中油缸前置方案具备更大的优化潜力和驱动力稳定性,但需更多考量油缸上铰点变动导致的运动干涉问题。而主臂平面内最大弯矩对铰点变动不敏感,其载荷响应主要决定于变幅机构布置方案。
3 结论
(1)油缸前置布置方案在驱动油缸的油压稳定性和后主臂结构的受力上具备明显优势,且具备更大的油缸驱动力优化潜力,较适用于管具载荷较大排管机的设计。油缸后置布置方案最大油缸驱动力略低于油缸前置方案,后主臂结构受力相对后者劣化,但油缸布置较自由且干涉风险较小;较小的姿态控制连杆受力也更便于变幅机构整体的紧凑设计,适用小型钻机的改造加装。
(2)油缸铰点的优化设计显示两种机构布置方案对后主臂结构受力起主要作用,优化空间极小,但可一定程度上降低油缸驱动力最大值。
