自动化集装箱码头水平运输智能闸口控制方法*
2022-05-18高延辉班宏宇董宝慧
高延辉 班宏宇 张 煜 董宝慧
1天津港第二集装箱码头有限公司 天津 120000 2武汉理工大学交通与物流工程学院 武汉 430063 3武汉理工大学韶关研究院 韶关 512100
0 引言
近年来港口集装箱吞吐量日益增长,码头各类作业设备数量也随之增加。现有的自动化集装箱码头在处理大批量货物装卸运输任务时经常出现装卸效率低下、港区交通拥堵等问题,为适应港区日益增长的交通流量,港口应合理规划整体布局,优化集装箱运输策略,缓解交通压力。
国内外已有很多关于自动化码头港区交通控制的研究。杨丽金[1]针对港口集疏运过程中车辆的拥堵现象设计了一种基于博弈的作业车辆协同路径规划方法,降低了车辆路径冲突概率。针对作业高峰期港区交通流拥堵状况,尤悦等[2]提出采用智能组织改变闸口通道数量和缓冲区长度策略,仿真结果表明该策略能有效缓解高峰作业时的港区拥堵。周峰等[3]通过四阶段法对码头车辆交通流进行了分析,为优化港区内部交通状况提供建议。王苗苗[4]通过划分集疏运道路网提出了新型港口集疏运道路规划体系,为港口道路布局及交通流控制提供了参考。Zhen L[5]针对港区车辆拥堵问题,建立模型并设计算法求解,提升了码头运输作业效率。
上述学者的研究主要集中在码头布局和车辆路径优化方面,而对港区内车辆交通控制的研究较少。本文以顺岸式自动化集装箱码头为研究背景,提出一种水平运输智能闸口控制方法,将交通控制闸口布置于堆场区车辆通行交汇处,对外集卡和港内ART的通行实施管控,实现港区交通的智能管理,并结合实际案例建立仿真模型,为港区交通管理提供决策依据。
在某自动化码头的集装箱进出港作业过程中,港内水平输送载运设备ART沿逆时针方向在码头前沿和堆场间通行,外集卡沿顺时针方向在堆场后方及堆场间通行,故ART和外集卡将在堆场区多个路段发生通行交汇现象。在车辆通行交汇处布置智能闸口控制系统,可有效管控集卡通行顺序,对提高自动化集装箱码头运输效率具有重要意义。
1 水平运输智能闸口及控制方法
自动化码头智能闸口控制系统主要包括车路协同控制设备和智能道闸设备,其中车路协同控制设备主要利用RFID信息采集、雷达探测、路侧感知、边缘计算、信息处理等装置实现多源路网信息的实时采集及处理;智能道闸设备实时获取路况信息,通过控制红绿灯及挡杆的工作状态实现对集装箱运输车辆的通行次序管控。
如图1所示,自动化码头水平运输智能闸口平面布局由堆场区、ART区、外集卡区等组成,主要包括ART车道、外集卡车道、智能闸口等。图中的1~4分别代表闸口1、闸口2、闸口3、闸口4。
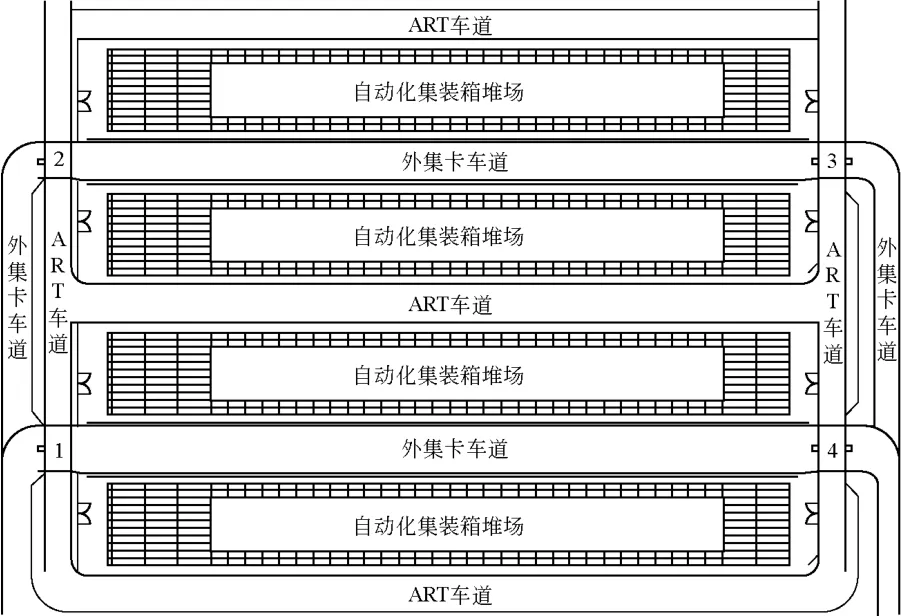
图1 自动化码头简化布局
当有装卸作业任务时,ART按照逆时针行驶方向由左侧ART纵向车道进入堆场,完成作业任务后经右侧ART纵向车道驶离堆场,从而完成一次逆时针闭环作业。外集卡按照顺时针行驶方向由左侧纵向车道驶入堆场,经右侧纵向车道驶离堆场,完成一次顺时针闭环作业。
在上述作业过程中,ART和外集卡可能会同时到达堆场交叉口。为缓解交汇处车辆拥堵现象,提升自动化码头水平运输效率,本文提出了一种智能通行策略(Intelligent Pass,IP)。与传统的先到先通行策略(First Come First Pass,FCFP)相比,IP考虑到实际运营的集卡数量配比,采用多优先级规则控制车辆通行顺序,以减少车辆等待时间。
在IP策略中,为保障岸边集装箱起重机的作业效率,第一优先级为ART通行;而当外集卡排队等待数量大于n或无ART在通行时,外集卡通行,此规则为第二优先级;第三优先级则是堆场横向作业车道的集卡数量达到堆场最大停放数量m时,ART、外集卡均不能通行;其流程如图2所示。传统FCFP策略基于到达时间进行判断,放行最早到达的车辆,遵守第三优先级规则,流程见图3。
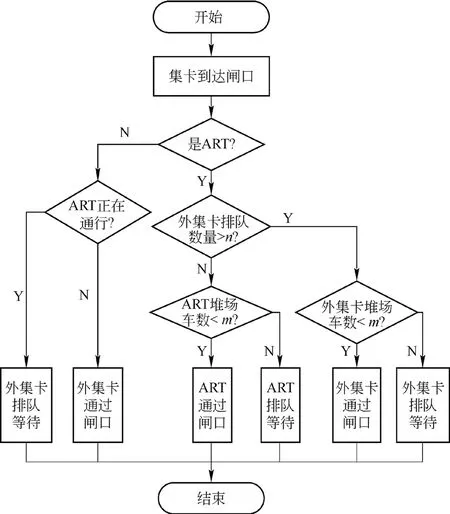
图2 IP策略流程图

图3 FCFP策略流程
2 基于闸口管控策略的水平运输工艺建模
2.1 模型Agent
根据自动化集装箱码头生产系统结构、运作方式以及离散事件建模理论,利用Anylogic软件对基于闸口管控的水平运输系统进行仿真。将外集卡和ART抽象为集卡Agent,如图4所示。
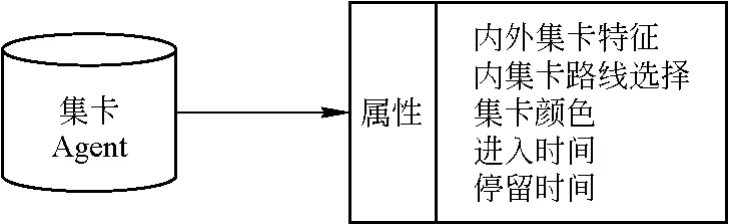
图4 集卡Agent
集卡Agent的属性信息包括ART和外集卡特征、ART路线选择、集卡颜色等,进入时间和停留时间。其中,ART和外集卡特征用来标识车辆为ART或外集卡;ART路线选择表示ART在交叉路口处选择驶入横向车道或继续沿纵向车道行驶;集卡颜色用于仿真模型区分ART和外集卡,红色代表ART,黄色代表外集卡;进入时间用于记录车辆在闸口排队等待的开始时间;停留时间则记录车辆在闸口处排队等待的总时长。
2.2 通行策略仿真逻辑
采用面向过程仿真方法,根据IP策略,构建完整仿真模型,如图5、图6所示。仿真流程为:Source模块分别产生ART和外集卡,外集卡概率性选择目标堆场作业位,ART则依次通过闸口;ART、外集卡到达闸口时,根据IP策略判断能否通过闸口,若能通行则继续前行,否则在闸口处排队等待。

图5 IP策略动画界面
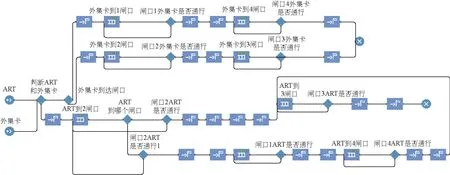
图6 IP策略仿真模型
FCFP策略模型的仿真流程与IP策略模型的不同之处在于通行策略,FCFP策略模型采用的通行规则为先到先行,其仿真模型如图7所示。
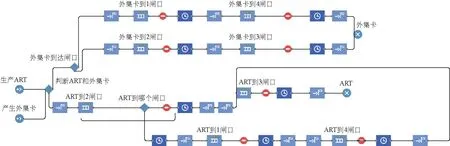
图7 FCFP策略仿真模型
3 仿真实验及结果分析
3.1 仿真实验
以某自动化集装箱码头为案例进行分析,结合堆场闸口布局、集卡进出港流量等基础数据信息建立仿真模型,将IP策略与传统的FCFP策略比对,从ART/外集卡的闸口处队列长度、等待时间、堆场内车辆队列长度等指标对IP策略进行分析。主要仿真实验参数设置如表1所示,其他参数均从码头相关设计资料中获得。
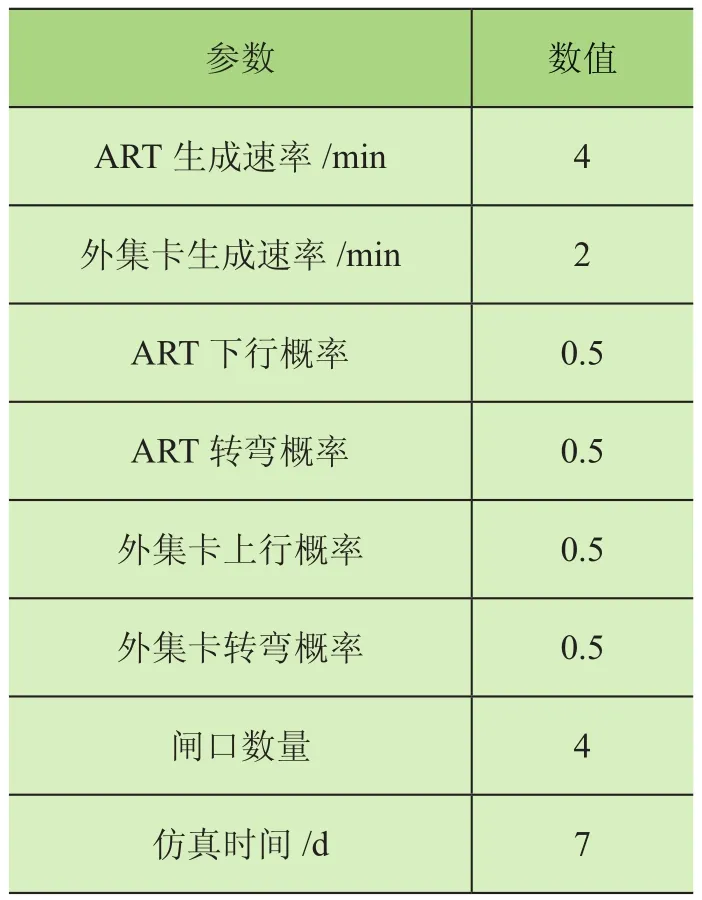
表1 仿真参数设置
在仿真建模时,策略中的最大阈值分别为:n=3、m=14。根据港口实际运营数据,集卡随机到达港口,且ART数量大于外集卡数量。考虑到仿真随机性,将车辆到达设置为按速率到达的指数分布,其中ART速率为4,外集卡速率为2。在进入堆场后,车辆概率性选择目标作业位,概率均设为0.5。
3.2 仿真结果及分析
重复多次实验,观察IP策略、FCFP策略仿真模型结果,输出结果如图8~图11所示。图8和图9反映闸口处车辆排队情况,图中横轴代表4个闸口,纵轴代表ART/外集卡的排队数量。图10和图11反映堆场内车辆数量变化情况,横轴代表仿真运行时间,纵轴代表堆场内ART、外集卡的数量。

图8 IP策略闸口排队情况
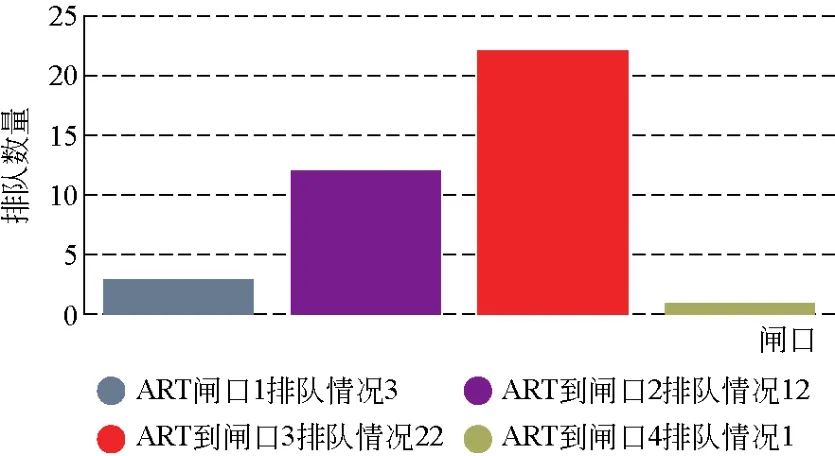
图9 FCFP策略闸口排队情况
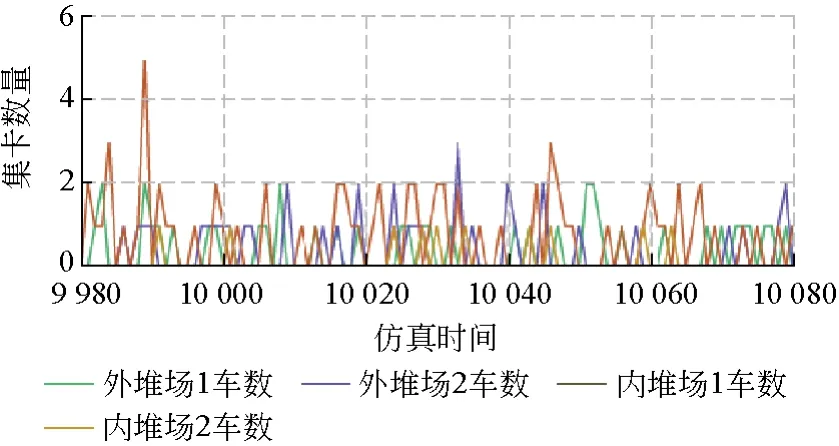
图10 IP策略堆场内车数情况图
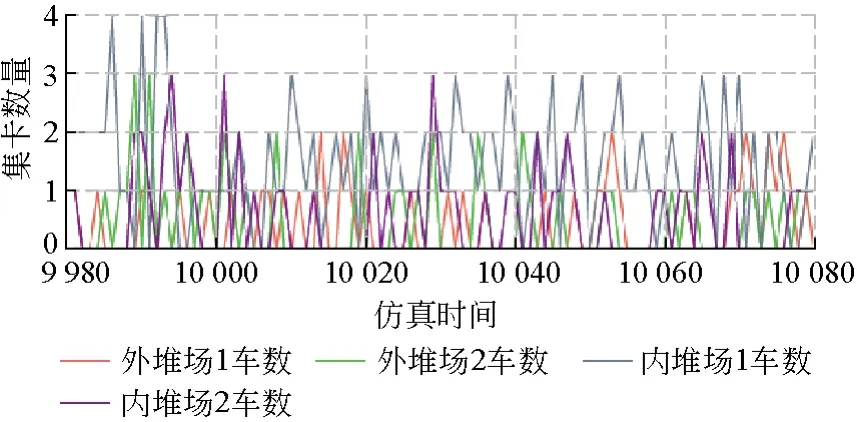
图11 FCFP策略堆场内车数情况
由图8可知,在IP策略下,ART在各闸口处排队数为1,闸口处拥挤程度较低。由图9可知,在FCFP策略下的各闸口处排队数量不均,排队数极值差高达21,闸口通行能力明显较低。图10、图11表明,各堆场车辆数量变化呈一定规律性,但各策略下峰值不同。与FIFO策略相比,IP策略下各堆场内的车辆数峰值普遍较低,在一定程度上缓解了堆场内水平运输压力。
由仿真结果表明,相较于FCFP策略,IP策略下ART在各闸口处排队数量明显下降,等待时间缩短,闸口通行能力得以提升,可能有效提高自动化码头水平运输效率,提升码头作业能力。
4 结论
为缓解自动化集装箱码头堆场道路交叉口处拥挤现象,本文提出了水平运输智能闸口控制方法,采用多优先级规则管控车辆在交叉口处的通行次序,建立了基于流程模拟的自动化集装箱码头仿真模型。结合实例,以ART和外集卡的等待时间及等待数量为指标,对其进行仿真分析。结果表明,相对于传统的先到先通行策略,智能闸口管控方法降低了ART和外集卡在交汇处的等待时间和等待数量,提升了自动化码头水平运输能力,为建设自动化集装箱码头智能水平运输系统提供了思路。
