采用LVDT 位移传感器的高温阀位置伺服系统设计
2022-05-18张立娟左哲清陈祖希
张立娟,程 相,左哲清,陈祖希
(北京精密机电控制设备研究所 航天伺服驱动与传动技术实验室,北京 100076)
0 引言
由于常温的燃油控制阀在高温环境下无法正常工作,因此调节燃油气体流量的高温燃油控制阀需求迫切,难度较大,高温阀的设计尤为重要[1-4]。根据国内外研究现状分析,高温阀系统控制核心,高温阀位置伺服系统,其控制精度,分辨率等指标均为难点,因此,本文提出一种基于LVDT 位移传感器的三级伺服阀位置伺服控制驱动器,通过精确调节进入燃烧室的燃油气体的质量流量,保障高温阀系统的工作稳定性。
1 伺服系统总体方案
高温阀位置伺服系统由前置级偏心拨杆阀、控制驱动器、LVDT 阀芯位移传感器、主功率级滑阀组成。系统控制原理及流程如图1 所示。

图1 高温阀控制原理及流程框图
控制器驱动器将控制信号与位移反馈信号的比较结果经过处理转换为前置级偏心拨杆阀中的力矩电机需要的电流信号。其中前置级偏心拨杆阀由带有偏心拨杆的直流力矩电机、小流量滑阀、位置传感器组成[5-6]。前置级偏心拨杆阀控制腔输出流量进而推动主功率滑阀阀芯移动。阀芯位移通过LVDT 位移传感器实时反馈阀芯的位移,进而通过位移闭环精确控制输出流量的大小,其中阀芯位移精确跟踪给定信号。
2 LVDT 阀芯位移采集电路
LVDT 位移传感器安装在锥阀阀芯的尾部,由于高温阀锥阀处的燃油蒸气温度高达1 000 K,高温燃油蒸气在经过锥阀节流口的过程中,通过阀芯和壳体传导大量的热量,因此选用的位移传感器具有耐高温、耐高油压的特点。选用美国TE 公司的MHR-V100 型号的LVDT 位移传感器作为高温阀的位移传感器,该型号的LVDT 位移传感器的特点是耐高温、高压,其中耐油压1 000 PSI,最高使用温度为200 ℃,测量行程0~5 mm,线性度为0.25%。
在位置伺服控制系统中,LVDT 用于作动器直线机械行程的实时反馈,伺服控制器通过将其反馈的位置信号与主控单元的指令进行比较来调整输出位置信号,以实现对阀芯直线位移的快速控制[7-8]。
经工装测试不同激励频率下的线性度,最终设计选用频率为2.5 kHz,3 Vpp 激励频率。调制解调电路如图2 所示。

图2 AD698 调制解调电路图
AD698 内部包含一个低失真的正弦波振荡器,以驱动LVDT 的初级线圈。LVDT 的次级输出包括2 个正弦波信号,随之再提供给AD698 作为输入信号。经过处理电路将2 个输入电压相除(VA/VB),从而产生一个成比例的单级或双极的直流电压输出。C1的取值决定激励信号的频率,R2决定满幅输出电压,R1决定激励信号的幅值。

式中IREF=500 μA,推荐使用频率fEXC=2.5 kHz,与激励源相匹配的电容:

C2、C3、C4可以调整AD698 调理电路截止频率,因此:

电阻R2决定AD698 调理信号(输出电压)的范围,其中LVDT 灵敏度为S,满量程位移d,因此:
LVDT 激励信号振幅选定3 V,因此,

以传感器标定数据为样本,用曲线拟合法求出非线性校正环节的特性曲线,并给出在Matlab环境下拟合多项式系数的最小二乘求解方法[9],编程实现位移量和电压输出。拟合结果如下:

3 系统仿真模型的建立
根据液压两级放大式高温阀的工作原理建立了高温阀控制系统Simulink 三级仿真模型[10-11],如图3 所示,高温阀控制驱动器给电机输入指令信号,使数字阀电机的电机轴转动一定角度,与电机轴配合的偏心拨杆带动数字阀阀芯产生一定位移,从而改变数字阀的流量,前置级偏心拨杆阀数字阀流量的变化进一步引起锥阀阀芯两腔的压差变化,驱动锥阀阀芯产生相应位移,通过位移传感器直接测量锥阀阀芯的位移实现闭环控制。锥阀阀芯的开启关闭改变了锥阀与壳体的节流间隙,输出气体的质量流量。高温阀阶跃响应曲线如图4 所示,表1 为部分模型参数。

表1 Simulink 模型部分参数

图3 Simulink 三级系统仿真模型示意图

图4 高温阀阶跃响应曲线
3 控制策略
3.1 电流环性能技术研究
1)电流畸变现象分析
根据前置级偏心拨杆阀的原理,伺服电机的负载力矩主要包括:滑阀轴向液动力产生的力矩、阀芯轴向加速度产生的力矩及阀芯阀套摩擦力或卡滞力产生的力矩。
滑阀液动力与轴向位移基本成正比,因此由液动力产生的电机负载转矩为:

阀芯直径为6.4 mm,参照已有的直径为6.4 mm 的伺服阀阀芯,阀芯质量约为0.007 kg。阀芯轴向加速度是随着电机的角加速度变化的,由于加速度产生负载转矩为:

考虑阀芯、阀套之间的摩擦力或卡滞力,则由此产生的负载转矩约为:

总负载转矩:

因此在电机运行过程中,给定信号通常为正弦波位置信号,因此该位置伺服系统属于变转速变负载控制系统。如图5 所示,在给定20 Hz 的正弦波位置信号处,可以看出,电机在有限角度内摆动时,每次在电机换向后,位置跟踪误差变大,出现了相位滞后的现象,同时,电流采样在电机零位时出现了畸变突起。

图5 畸变电流曲线
2)反电势补偿策略
电机在零位的转速变化最大,速度的波动引起了反电势变化,因此对电流环产生了影响,导致加速度精确度下降;为解决电流畸变问题,采用反电势补偿策略,如图6 所示。

图6 反电势补偿控制策略原理框图
对于伺服系统,为提前抵消有限转角电机运行时产生反电势所需的电压控制量,提前给出电机运行所需要的大部分电压控制量,减少了后级闭环所需要的电机控制量,在很大程度上提高了电机的动态响应能力[13-16]。
由于系统存在逆变器等效惯性环节和数字控制采样滞后等时滞环节,会影响补偿的效果,因此补偿结果并不理想,但是与之前没有任何补偿时相比,电流响应还是有明显的改善。
3.2 前置级偏心拨杆阀位置环动态性技术研究
1)位置环高频正弦跟踪时幅值超调、相位滞后、换向突变问题分析
由于前置级偏心拨杆阀位置伺服系统位置跟踪性能十分关键,但机械结构和控制结构会同时为系统引入时间延迟,加上系统不可避免地存在着一些扰动,使得位置随动系统的响应不能很好地跟随输入指令,随着给定信号频率增大,系统幅值超调和相位滞后问题越来越严重,导致系统带宽降低。为减小相位滞后,使用传统的PID 控制策略,加大比例系数和微分系数,当给定50 Hz 的正弦波信号时,如图7 所示,出现了较大的位置跟踪误差,严重降低了位置跟踪的精度,并且电机每次在换向位置出现跟踪突变现象。

图7 位置幅值超调及跟踪突变情况
2)前馈控制策略
由于在传统闭环PID 反馈控制中,被控对象在控制器的给定和反馈出现偏差以后,才能对被控对象产生作用。前馈控制可以提前根据系统控制器的偏差变化趋势对实际的响应进行相应的调整,加快系统的响应速度,减小系统的控制偏差,与反馈控制相互配合,实现既能保证系统的稳态精度又能加快动态响应速度的控制效果。并且通过对前馈环节的不同设计,可以达到不同的控制效果,使系统能够满足工作需求[12]。
因此,为改善位置环高频正弦跟踪时相位滞后问题,采用加入一阶和二阶导数的前馈控制量,获得了满意的控制效果。一阶导数的前馈控制量能够补偿控制系统的速度误差,二阶导数的前馈控制量能够补偿控制系统的加速度误差,满足系统对速度与加速度的要求,减小控制系统的位置和速度跟踪误差。原理框图如图8 所示。

图8 前馈补偿控制策略原理框图
采用位置环前馈补偿控制策略后,实际角度位置跟踪滞后给定角度位置23°,对比之前的相位滞后65°,可见采用位置前馈控制的位置环,可保证伺服系统快速响应,大大提高了位置环的带宽,同时也减少了位置跟踪突变,保证了系统定位的高精度、无超调,使系统获得理想的位置控制性能。
3.3 零位修正技术研究
1)位置环低频正弦跟踪波动问题
在电机低频正弦波跟踪过程中,电流采样曲线本应很平稳,但却出现了如图9 所示的电流微小波动问题,并在前置级偏心拨杆阀位置跟踪曲线中出现了微小误差,大大影响了高温阀控制的分辨率。

图9 低频电流波动曲线
2)AD 零位校正策略
为解决低频电流波动问题,对电流采样进行反复测试,电流AD 采样零位漂移及采样频率低。采用软件AD 零位校正的方式解决电流波动问题[17-18]。
3.4 控制效果
本章采用反电势补偿、前馈补偿、AD 零位校正策略后,电机位置跟踪曲线和电流曲线如图10所示。

图10 控制策略校正后电机位置跟踪曲线(黑色)和电流曲线(蓝色)
4 实验研究
根据试验要求建立了高温阀的静态测试系统,如图11 所示,其中包含控制驱动器、直流电源、控制能源、高温阀、测试台、操控台、数据采集系统等。
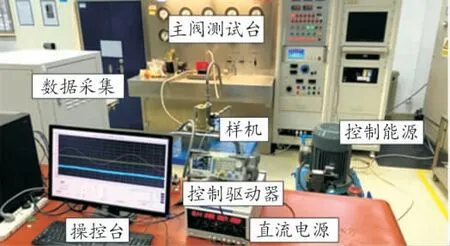
图11 高温阀动静态测试系统装置图
高温阀位置伺服系统控制驱动器样机如图12所示,对控制系统输入低电平0.3 V,高电平1.5 V(对应阀芯行程位移),占空比50%,频率为0.2 Hz 的方波控制信号,其位移跟踪曲线如图13 所示,采用以上控制技术研究后,跟踪状态良好。

图12 高温阀控制驱动器样机实物图

图13 高温阀方波位移跟踪曲线
对控制系统输入低电平为0.26 V,高电平为2.85 V(对应高温阀的锥阀阀芯全行程位移)的正弦信号,在试验温度达到727 ℃(1 000 K)后,记录高温阀的位移回环曲线,根据高温阀试验中得到的位移回环曲线判断高温阀工作时是否发生卡滞。图14 为正弦位移跟踪曲线。

图14 高温阀正弦位移跟踪曲线
图15 为该模拟环境下阀芯的位移回环曲线。阀芯位移回环曲线的对称度、滞环等指标均良好,高温阀空载下的静态性能优异,效果较好。

图15 727 ℃-0.5 L/min 高温阀位移回环曲线
5 结论
设计了高温阀位置伺服系统控制器,通过控制前置级偏心拨杆阀,实现对高温阀的位置控制。通过系统试验证实,该伺服控制器动态高、分辨率高,能够实时跟踪给定位置,实现对高温阀流量输出的精确控制。
