BTT机动自动驾驶仪解耦补偿控制器设计方法
2022-05-18赵艳辉段朝阳李海峰黑高源
赵艳辉 段朝阳 李海峰 黑高源





摘 要: 为了解决弹体在大滚转角速度BTT机动情况下通道间交叉耦合控制问题,本文提出了一种解耦补偿控制器设计方法,将耦合干扰量与测量输出量叠加后反馈至自动驾驶仪控制器的输入端,改进了干扰传递函数的零点配置和干扰传递特性,有效抑制了通道间干扰量对输出评价的影响。通过极小化干扰传递函数在系统闭环极点处的传递增益,获得了解耦补偿控制参数的数值解。利用三通道交叉耦合模型对所设计的解耦补偿控制参数进行了数字仿真验证。仿真结果表明,所提出的解耦补偿控制器能够有效抑制弹体偏航通道攻角的峰值,同时也提高了俯仰通道的响应品质。
关键词: BTT机动控制; 交叉耦合; 自动驾驶仪; 解耦补偿控制; 控制参数优化; 制导与控制
中图分类号: TJ765.2; V249.1
文献标识码: A
文章编号: 1673-5048(2022)02-0106-07
DOI: 10.12132/ISSN.1673-5048.2021.0100
0 引 言
随着航空精确制导武器的不断发展,空空导弹作战模式逐渐向着先敌发现、先敌发射、先敌命中、先敌脱离的技术方向发展[1-2]。可变流量固体火箭冲压发动机技术的逐渐成熟,使得以冲压发动机为动力系统的远程空空导弹的出现成为可能[3-4]。远程空空导弹控制系统的设计综合考虑了导弹气动外形、冲压发动机工作特性、执行机构特性等因素的具体约束条件,是实现导弹性能的关键环节。受冲压发动机工作特性和非轴对称气动外形的约束,在中制导飞行阶段适合采用BTT机动方式,对于采用双水平进气道的弹体,甚至可能会采用全弹道BTT机动控制方式。BTT机动需要导弹的滚转控制通道和俯仰控制通道配合完成,以实现特定空间方向上的机动,同时需要偏航控制通道实现近零侧滑角协调控制[5-6]。BTT机动的等效时间常数取决于弹体滚转控制通道和俯仰控制通道的快速性,具有大滚转角速度控制能力的自动驾驶仪可以使弹体纵向对称平面和机动平面快速对正,有利于减小平面外机动和BTT机动控制的等效时间常数,对修正制导偏差较为有利。与此同时,大滚转角速度响应能力会加剧控制通道间的惯性耦合和运动学耦合响应,增大侧滑角响应峰值,降低俯仰通道响应品质。为了追求快速性并减小BTT机动的滚转/俯仰复合时间常数,弹体需以较大的滚转角速度绕弹体纵轴旋转,由此产生俯仰-偏航-滚转通道耦合,在大滚转角速度-大攻角飞行条件下,这种耦合特性將更为显著,控制系统需要采取必要的控制措施,保证控制系统的稳定性和冲压发动机可靠工作。
抑制由弹体快速滚转产生的弹体侧滑运动是实现BTT协调控制的关键。Theis等[7]利用鲁棒LPV方法,设计了前馈+反馈的二自由度控制结构,有效增加了自动驾驶仪的鲁棒性和抗干扰能力。杜立夫、Li等[8-9]利用扩张状态观测器对耦合量进行估计,在控制算法中对耦合量进行补偿,从而实现BTT自动驾驶仪的解耦补偿控制。反演控制[10]、鲁棒控制[11]等先进控制方法也在带有冲压发动机的导弹控制系统设计中得到借鉴和应用,但其稳定性指标的量化和控制参数的解析解很难像经典控制那样容易获得,需要工程技术人员在控制理论和工程经验之间作出艰难的选择; 应用现代控制理论的导弹控制律在性能与鲁棒性上具有一定的优势,但计算量与实时性问题是现代控制算法向工程转换所急需解决的问题。对于协调转弯控制技术,考虑到飞行器硬件条件、算法可实现性及可靠性等要求,基于经典控制理论的驾驶仪设计方法[12-15]仍然在工程应用中占据主导地位。
本文在经典自动驾驶仪反馈控制器的基础上设计通道间的解耦补偿控制器, 并寻求解耦补偿控制参数的数值解。该控制方案研究思路如下: 首先,构建大滚转角速度BTT机动情况下的三通道交叉耦合状态空间模型,并
推导仅有反馈控制器工作时的干扰传递特性; 其次,构建解耦补偿控制器的一般形式,该形式适用于存在惯性耦合和运动学耦合项时的解耦补偿; 再次,通过极小化闭环极点处的干扰传递函数的传递增益,获得解耦补偿控制参数的数值解; 最后,通过数字仿真检验了所设计的解耦补偿控制器的有效性。
4 设计实例与仿真验证
通过设计实例对采取解耦补偿措施前后的控制系统性能进行比较,演示解耦补偿参数的优化过程,并证明解耦补偿控制器设计方法的有效性。某飞行条件下的仿真参数设定如下:
(1) 俯仰通道闭环极点固有频率设计值: ωe=17.5 rad/s,偏航通道闭环极点固有频率设计值ωe=15 rad/s。
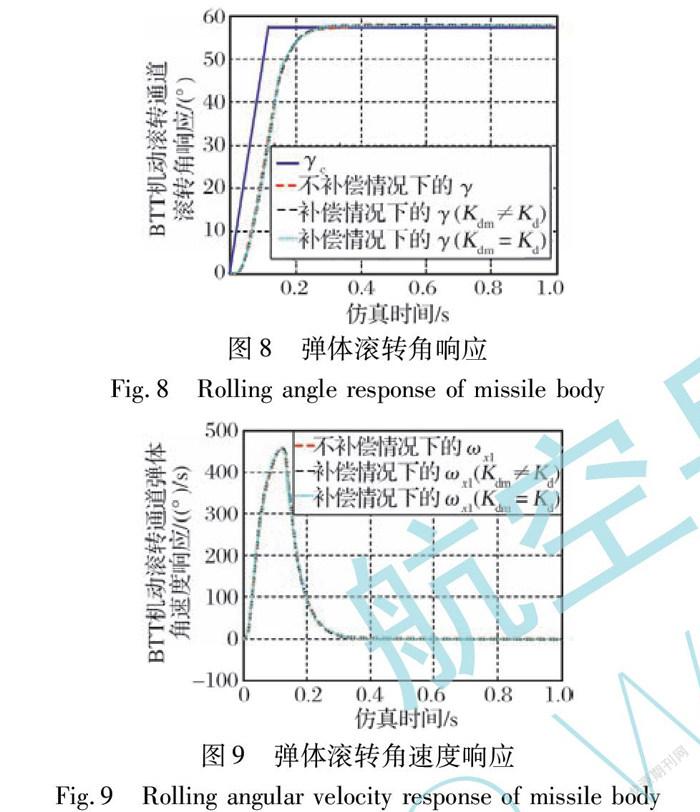
(2) 滚转角指令为57.3°,俯仰通道加速度指令为200 m/s2,偏航通道加速度指令为0 m/s2。
采取补偿措施后,惯性耦合干扰到偏航通道攻角的传递增益、惯性耦合干扰到俯仰通道攻角的传递增益如图4所示。
由图4可知,对于惯性耦合项,解耦补偿增益取1倍预设值时, 干扰传递函数增益最小,解耦补偿效果最好。
当控制参数Kdm和Kd取相同值时,形成一维参数优化问题,依据干扰传递函数幅值极小化约束进行数值计算,通过传递增益极小值查表获得的运动学耦合解耦补偿参数如图5所示。
当控制参数Kdm和Kd取不同值时,形成二维参数优化问题,依据干扰传递函数幅值极小化约束进行数值计算,通过传递增益极小值查表获得的运动学耦合解耦补偿参数如图6所示。
运动学解耦补偿增益取图5~6所示的数值解时的干扰传递函数在关键频率处的增益如图7所示。
由图7可知,对于运动学耦合干扰,解耦补偿参数Kdm和Kd取不同值时,干扰传递函数在闭环极点固有频率处的传递增益更小。 弹体滚转角响应如图8所示,滚转角速度响应如图9所示。 俯仰通道仿真响应曲线如图10所示。
由仿真结果可知,采取惯性耦合和运动学耦合解耦补偿措施后,俯仰通道攻角和加速度响应速度变快,响应品质得到改善,俯仰通道舵偏角的峰值略有增加。
偏航通道仿真响应曲线如图11所示。由仿真可知,采取惯性耦合和运动学耦合解耦补偿措施后,偏航通道攻角的响应峰值显著降低,由原来的3°下降到0.65°,响应品质得到显著改善; 偏航通道舵偏角的峰值有一定程度增加,这是采取解耦补偿措施需付出的控制代价; 解耦补偿参数Kdm和Kd取不同值时的极小化条件对应的偏航通道攻角峰值最小。
5 结 论
本文建立了大滚转角速度BTT机动情况下的弹体动力学模型,重点考虑了由滚转运动引起的俯仰和偏航通道间的惯性耦合和运动学耦合干扰。在三回路自动驾驶仪的基础上,将耦合干扰项与系统反馈输出叠加并反馈至控制器的输入端,形成了关于系统状态的解耦补偿控制器。同时给出了分析解耦补偿问题的原理框架,并将解耦补偿控制参数求取问题转化为受系统闭环极点固有频率约束的数值优化问题,通过极小化耦合干扰到通道攻角的传递增益,获得了解耦补偿参数的数值解。最后利用典型飞行条件下的三通道耦合模型和控制参数对本文提出的解耦补偿控制器设计方法进行了仿真验证。结果显示,采用解耦补偿措施后,俯仰通道攻角和加速度响应速度变快,响应品质得到改善,偏航通道攻角的响应峰值显著降低。
参考文献:
[1] 樊会涛, 崔颢, 天光. 空空导弹70年发展综述[J]. 航空兵器, 2016(1): 3-12.
Fan Huitao, Cui Hao, Tian Guang. A Review on the 70-Year Development of Air-to-Air Missiles[J]. Aero Weaponry, 2016(1): 3-12.(in Chinese)
[2] 樊会涛, 张蓬蓬. 空空导弹面临的挑战[J]. 航空兵器, 2017(2): 3-7.
Fan Huitao, Zhang Pengpeng. The Challenges for Air-to-Air Missile[J]. Aero Weaponry, 2017(2): 3-7.(in Chinese)
[3] 霍东兴, 闫大庆, 高波. 可变流量固体冲压发动机技术研究进展与展望[J]. 固体火箭技术, 2017, 40(1): 7-15.
Huo Dongxing, Yan Daqing, Gao Bo. Research Progresses and Prospect of Variable Flow Ducted Rocket Technologies[J]. Journal of Solid Rocket Technology, 2017, 40(1): 7-15.(in Chinese)
[4]
李栋, 仇振安, 王锋, 等. 进气交汇位置对固体火箭冲压发动机性能影响的仿真研究[J]. 航空兵器, 2021, 28(2): 100-103.
Li Dong, Qiu Zhen’an, Wang Feng, et al. Simulation Research on Influence of Inlets Crossing Position on Solid Ducted Rocket Performance[J]. Aero Weaponry, 2021, 28(2): 100-103. (in Chinese)
[5] 吕飞, 姜殿民. 远程空空导弹的BTT/STT复合控制算法研究[J]. 计算机仿真, 2013, 30(12): 49-52.
Lü Fei, Jiang Dianmin. Research on Hybrid BTT/STT Control Algorithm for Long-Range Air-to-Air Missile[J]. Computer Simulation, 2013, 30(12): 49-52.(in Chinese)
[6] 严大卫, 孙瑞胜, 陈洁卿, 等. 基于混合BTT/STT控制的滑翔制导炸弹自动驾驶仪设计[J]. 弹道学报, 2016, 28(4): 47-51.
Yan Dawei, Sun Ruisheng, Chen Jieqing, et al. Hybrid BTT/STT Autopilot Design for Glide Guided Bomb[J]. Journal of Ballistics, 2016, 28(4): 47-51.(in Chinese)
[7] Theis J, Pfifer H, Knoblach A, et al. Linear Parameter-Varying Feedforward Control: A Missile Autopilot Design[C]∥AIAA Guidance, Navigation, and Control Conference, 2015.
[8] 杜立夫, 張瑞, 赵志芳, 等. 基于ESO的BTT飞行器多变量解耦控制方法研究[J]. 上海航天, 2018, 35(1): 81-86.
Du Lifu, Zhang Rui, Zhao Zhifang, et al. Multivariable Decoupling Control Method of BTT Aircraft Based on ESO[J]. Aerospace Shanghai, 2018, 35(1): 81-86.(in Chinese)
[9] Li S H, Yang J. Robust Autopilot Design for Bank-to-Turn Missiles Using Disturbance Observers[J]. IEEE Transactions on Aerospace and Electronic Systems, 2013, 49(1): 558-579.
[10] 张志龙, 史贤俊. 高超声速飞行器高度子系统控制律反演設计[J]. 航空兵器, 2020, 27(6): 61-66.
Zhang Zhilong ,Shi Xianjun . Inverse Design of Control Law for Altitude Subsystem of Hypersonic Vehicle[J]. Aero Weaponry, 2020, 27(6): 61-66.(in Chinese)
[11] 涂喜梅, 周少波, 张金鹏,等. 一种基于李群理论的三维耦合最优制导律[J]. 航空兵器, 2020, 27(6): 55-60.
Tu Ximei , Zhou Shaobo , Zhang Jinpeng , et al. Three-Dimensional Coupling Optimal Guidance Law Based on Lie Group Theory[J]. Aero Weaponry, 2020, 27(6): 55-60.(in Chinese)
[12] 李友年, 郑鹍鹏, 陈星阳. 三回路过载驾驶仪的快速性极限分析[J]. 弹箭与制导学报, 2013, 33(3): 17-20.
Li Younian, Zheng Kunpeng, Chen Xingyang. Rapidity Limitation Analysis of Three-Loop Acceleration Autopilot[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2013, 33(3): 17-20.(in Chinese)
[13] 李威, 温求遒, 夏群利. BTT导弹的三通道驾驶仪频带匹配关系研究[J]. 航天控制, 2017, 35(5): 30-36.
Li Wei, Wen Qiuqiu, Xia Qunli. Research on the Frequency Matching Performance of BTT Autopilots[J]. Aerospace Control, 2017, 35(5): 30-36.(in Chinese)
[14] 李强, 童伟, 王晓晖, 等. 升力体布局飞行器BTT协调转弯驾驶仪研究[J]. 航天控制, 2016, 34(5): 52-58.
Li Qiang, Tong Wei, Wang Xiaohui, et al. Study on BTT Coordinated Turn Autopilot Design for Lifting Vehicles[J]. Aerospace Control, 2016, 34(5): 52-58.(in Chinese)
[15] 后德龙, 何平, 张锐, 等. 导弹BTT协调控制及参数设计方法[J]. 现代防御技术, 2018, 46(2): 51-56.
Hou Delong, He Ping, Zhang Rui, et al. Missile BTT Coordination Control and Parameters Design Method[J]. Modern Defence Technology, 2018, 46(2): 51-56.(in Chinese)
Design Method of a Compensation Decoupling
Controller Applied to the Bank-to-Turn Autopilot
Zhao Yanhui1*,Duan Chaoyang1, 2,Li Haifeng1,Hei Gaoyuan1
(1. China Airborne Missile Academy,Luoyang 471009,China;
2. Aviation Key Laboratory of Science and Technology on Airborne Guided Weapons, Luoyang 471009, China)
Abstract: A design method of a compensation decoupling controller applied to the bank-to-turn autopilot is pre-sented for overcoming the cross-coupling disturbance caused by the high rolling angular velocity of the missile body. The zero assignment and the transfer characteristics of the disturbance transfer function are improved in the way that the cross-coupling disturbances are fed back to the input of the controller together with the measured outputs, and then the influence of cross-coupling disturbance on the output evaluation is effectively suppressed.
By minimizing the transmission gain of the disturbance transfer function at the closed-loop poles of the system,the numerical solution of the decoupling compensation control parameters is obtained.
The simulation verification of the decoupling control parameters is obtained by using the pitch-yaw-roll channel cross coupling model. The simulation results show that the compensation decoupling controller presented in this paper is valid to suppress the peak of the angle of attack in yaw control channel, and to improve the response quality of pitch control channel.
Key words: bank-to-turn maneuver control; cross coupling; autopilot; compensation decoupling control; control parameter optimization; guidance and control
