基于陀螺仪/BDS的多飞行器编队相对定姿方法
2022-05-18卢克文王新龙李群生陈鼎
卢克文 王新龙 李群生 陈鼎





摘 要: 多飞行器编队的多重作业能力强、可靠性高、工作效率高,是未来航空领域发展的重要趋势。连续高精度的相对姿态信息对编队队形的保持或重构必不可少,这对相对定姿的精度和连续性提出更高要求。为了提高相对定姿精度和连续性,设计了一种基于陀螺仪/BDS的相对定姿方案。采用BDS差分技术消除了载波相位中的公共误差,利用高精度双差载波相位进行量测更新,提高了相对定姿的精度。同时,基于飞行器之间的相对姿态模型,利用陀螺仪测得的角速度进行一步预测,解决BDS不可用时无法得到相对定姿结果的问题,提高了相对定姿的连续性。仿真验证表明,所设计方案不仅可以实现高精度相对定姿,并且在可用星少于四颗时仍具备较高精度的相对定姿能力,能够满足多飞行器编队对相对定姿精度和连续性的要求。
关键词: 多飞行器; 编队; 相对定姿; 高精度; 连续性; BDS差分技术
中图分类号: TJ765; V417
文献标识码: A
文章编号: 1673-5048(2022)02-0080-07
DOI: 10.12132/ISSN.1673-5048.2021.0089
0 引 言
多飞行器编队是多个飞行器基于相对位置、相对速度和相对姿态等信息进行队形排列、任务分配的组织模式[1-2],具有工作范围广、可靠性强、整体工作效率高等优点,是未来航空领域发展的重要趋势。连续高精度的相对姿态信息是多个飞行器能够实现编队飞行的重要保障[3-4]。
近年来,很多学者开展了相对定姿方面的研究。文献[5]提出一种SINS/GPS松组合方法,利用相对GPS结果校正相对SINS误差,得到了相对姿态。在此基础上,文献[6]提出了一种SINS/GNSS紧组合方法,将主、从飞机的伪距/伪距率进行差分,利用差分伪距/伪距率估计从机的SINS误差,实现了相对定姿。为了同时解决松组合级联滤波和紧组合计算负担较大[7]的问题,文献[8]提出一种双滤波器的SINS/GPS相对定姿方法,载波平滑码滤波器利用载波相位平滑伪距估计测量噪声协方差阵,组合导航滤波器利用所得测量噪声协方差阵和IMU的噪声协方差阵估计相对姿态。另外,一些学者还将视觉导航引入相对定姿系统中。文献[9]提出了一种基于SINS/GPS/视觉的容错相对定姿方法,采用层次化滤波结构有效融合了相对SINS结果、相对GPS结果和视线矢量信息,实现了相对定姿。
分析可知,现有的相对定姿方法主要有SINS/ GNSS相对定姿和SINS/GNSS/视觉相对定姿两种方法。由于视觉导航的作用距离有限[10-11],且易受光线条件的影响,不适用于成员距离较远的多飞行器编队。另外,现有SINS/GNSS相对定姿方法绝大多数是利用GNSS的位置/速度信息或伪距/伪距率信息进行的。虽然已经有了利用高精度载波相位信息进行绝对定姿的方法[12-13],但是将高精度载波相位信息用于相对定姿的方法还未见报道。鉴于此,本文提出了一种利用高精度载波相位信息进行相对定姿的方法,进而将高精度载波相位定姿结果与陀螺仪输出信息相融合,设计了一种基于陀螺仪/BDS的多飞行器編队相对定姿方案。
3 仿真验证与结果分析
3.1 仿真条件
多飞行器编队中有3个飞行器,各飞行器的出发点不同,但在飞行中采用相同的机动方式。图6为多飞行器编队轨迹图。其中,飞行器1的出发点为经度121.36°,纬度31.21°,高度1 000 m; 飞行器2的出发点为经度121.29°,纬度31.14°,高度2 000 m; 飞行器3的出发点为经度121.22°,纬度31.07°,高度3 000 m。表1为飞行器编队的机动方式。
编队中各飞行器配置相同精度的传感器: 陀螺仪的常值漂移和随机漂移均取1 (°)/h; BDS接收机输出载波相位测量值的精度取7.6×10-4 m。另外,天线A,B,C在b1系的坐标与天线D,E,F在b2系的坐标相同,分别为[0,0,0]T,[0,1,0]T,[1,0,0]T。仿真总时长取1 800 s,仿真时间间隔取0.01 s。
3.2 仿真结果与分析
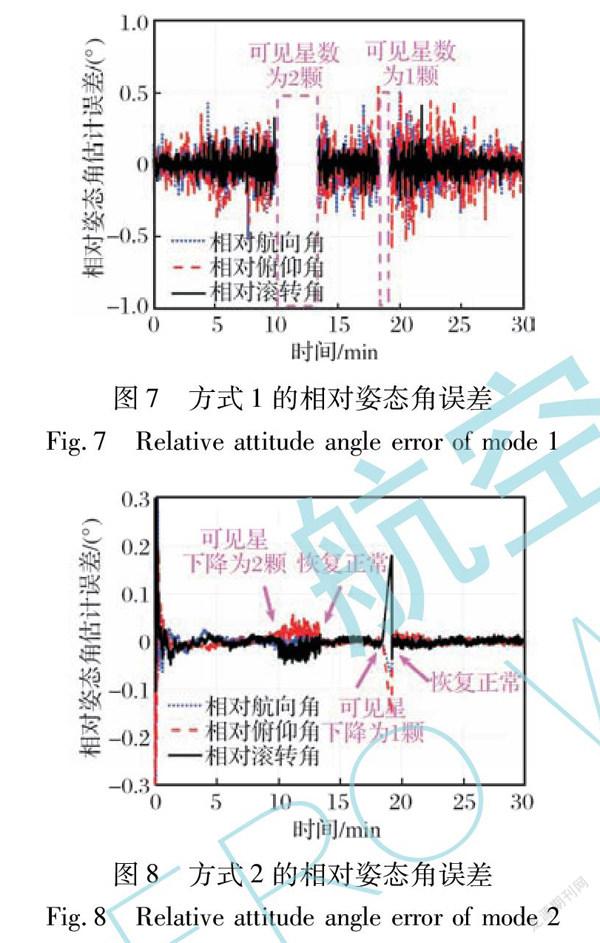
为了对所提方案相对定姿的精度和连续性进行验证,采用两种方式测量飞行器1,2之间的相对姿态。方式1先利用BDS对飞行器1,2分别进行绝对定姿,再根据绝对定姿结果计算相对姿态; 方式2则直接采用所提方案测量相对姿态。图7~8为相对姿态角误差曲线。表2为相对姿态角误差统计表。为了验证所提方案在可用星数较少情况下的性能,在600~800 s期间,可用星数下降为2颗,在1 100 s ~1 150 s期间,可用星数下降为1颗,其他时间段可用星为正常水平。
由图7可知,方式1可以测得飞行器1,2间的相对姿态角,但测量精度较差。其中,相对航向角和相对俯仰角的误差最高达0.5°以上,无法满足高精度相对定姿的要求。另外,由于方式1需要四颗可用星解算n系下的基线矢量,故在600 ~ 800 s和1 100 ~1 150 s期间,无法输出相对定姿结果。
由图8可知,方式2也能够有效地估计相对姿态角,并且估计精度高于方式1。结合表2中的数据可知,方式2的相对姿态角估计误差均值和均方差都小于方式1,其中误差均方差比方式1分别减少0.08°,0.05°,0.11°,表明所提方案能提高相对姿态角的估计精度,实现高精度相对定姿。另外,方式2在可用星数为2颗时,可以通过调整量测方程维数实现滤波估计,得到较高精度的相对定姿结果; 在可用星数为1颗时,仍可以将一步预测结果作为输出。但由于一步预测是利用陀螺仪的输出信息进行的,而陀螺仪输出中存在误差漂移,故在可用星数为1颗时的相对定姿误差会随时间累积,长时间后无法满足精度要求。分析表明,相较于单独利用BDS进行相对定姿的方法,本文方案具有更高的相对定姿精度,并且在可用星数较少的情况下仍具备较高精度的相对定姿能力,相对定姿连续性更好,能够较好地满足多飞行器编队对相对定姿精度和连续性的需求。
4 结 论
为了提高多飞行器编队的相对定姿精度和连续性,本文设计了一种基于陀螺仪/BDS的相对定姿方案。通过分析得到以下结论:
(1) 采用BDS差分技术可以消除载波相位观测量中的卫星钟差、星历误差和大气延迟等公共误差,得到高精度的双差载波相位观测量,利用高精度双差载波相位可以提高相对定姿的精度。
(2) 在BDS正常使用时,本文方案利用飞行器1和飞行器2陀螺仪的角速度输出计算相对角速度,基于飞行器1,2之间的相对姿态方程对相对姿态四元数进行一步预测; 在此基础上,利用飞行器1,2上的高精度双差载波相位信息进行量测更新,有效估计出相对姿态。本文方案将陀螺仪测得的角速度信息与BDS的双差载波相位信息进行融合,提高了相对定姿的精度。另外,在BDS不可用时,该方案仍可以将一步预测的结果作为相对定姿系统的输出,提高了相对定姿的连续性。
综合来看,本文方案将陀螺仪与BDS进行组合,不仅可以实现高精度的相对定姿,并且在BDS可用星少于四颗时仍然具备较高精度的相对定姿能力,能够满足多飞行器编队对相对定姿精度和连续性的要求。
参考文献:
[1] 徐俊, 王茂森, 戴劲松, 等. 四旋翼无人机的编队飞行控制系统设计[J]. 机械设计与制造, 2018(3): 263-266.
Xu Jun, Wang Maosen, Dai Jinsong, et al. The Design of Control System for Formation Flight of Quadrotor UAV[J]. Machinery Design & Manufacture, 2018(3): 263-266.(in Chinese)
[2] Fosbury A M, Crassidis J L. Relative Navigation of Air Vehicles[J]. Journal of Guidance, Control, and Dynamics, 2008, 31(4): 824-834.
[3] Ezequiel C A F, Cua M, Libatique N C, et al. UAV Aerial Imaging Applications for Post-Disaster Assessment, Environmental Management and Infrastructure Development[C]∥International Conference on Unmanned Aircraft Systems (ICUAS),IEEE, 2014: 274-283.
[4] Wise R, Rysdyk R. UAV Coordination for Autonomous Target Tracking[C]∥AIAA Guidance, Navigation, and Control Conference and Exhibit,2006.
[5] 崔乃剛, 王小刚, 郭继峰. 基于INS/GPS的智能导弹协同作战相对导航系统研究[J]. 战术导弹技术, 2010(2): 1-5.
Cui Naigang, Wang Xiaogang, Guo Jifeng. Study of Relative Navigation System Based on INS/GPS for Cooperative Intelligent Missile[J]. Tactical Missile Technology, 2010(2): 1-5.(in Chinese)
[6] 魏红波. 基于伪距/伪距率双差的INS/GNSS紧组合相对导航算法研究[J]. 现代导航, 2017, 8(2): 87-92.
Wei Hongbo. Relative Navigation Algorithm of Tightly Integrated INS/GNSS Based on Pseudo-Range/Pseudo-Range Rate Double-Difference[J]. Modern Navigation, 2017, 8(2): 87-92.(in Chinese)
[7] Park J D, Kim M W, Lee J Y, et al. An Integration Method for L1 GPS Receiver and MEMS-IMU Based on Dual Filters[C]∥International Science and Technology Conference, 2016.
[8] Lee J Y, Kim H S, Choi K H, et al. Adaptive GPS/INS Integration for Relative Navigation[J]. GPS Solutions, 2016, 20(1): 63-75.
[9] 曲法义, 王小刚, 崔乃刚, 等. 基于惯导/GPS/视觉的无人机容错相对导航方法[J]. 中国惯性技术学报, 2013, 21(6): 781-785.
Qu Fayi, Wang Xiaogang, Cui Naigang, et al. Fault-Tolerance Relative Navigation Approach Based on SINS/GPS/Vision for UAV[J]. Journal of Chinese Inertial Technology, 2013, 21(6): 781-785.(in Chinese)
[10] 金紅新, 杨涛, 王小刚, 等. 多传感器信息融合理论在无人机相对导航中的应用[J]. 国防科技大学学报, 2017, 39(5): 90-95.
Jin Hongxin, Yang Tao, Wang Xiaogang, et al. Application of Multi-Sensor Information Fusion in UAV Relative Navigation Method[J]. Journal of National University of Defense Technology, 2017, 39(5): 90-95.(in Chinese)
[11] 崔乃刚, 王小刚, 郭继峰. 基于Sigma-Point卡尔曼滤波的INS/Vision相对导航方法研究[J]. 宇航学报, 2009, 30(6): 2220-2225.
Cui Naigang, Wang Xiaogang, Guo Jifeng. Research on Relative Navigation Method Based on INS/Vision Using Sigma-Point Kalman Filter[J]. Journal of Astronautics, 2009, 30(6): 2220-2225.(in Chinese)
[12] 秦红磊, 陈万通, 金天, 等. 新的GPS单频单历元定姿算法[J]. 北京航空航天大学学报, 2011, 37(9): 1063-1069.
Qin Honglei, Chen Wantong, Jin Tian, et al. New Attitude Determination Algorithm for Single Epoch, Single Frequency Using GPS[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(9): 1063-1069.(in Chinese)
[13] 韩璐, 景占荣, 段哲民. 采用激光陀螺/GPS的导弹组合定姿系统[J]. 红外与激光工程, 2011, 40(5): 915-920.
Han Lu, Jing Zhanrong, Duan Zhemin. Laser Gyro/GPS Integrated Attitude Estimation System for Ballistic Missile[J]. Infrared and Laser Engineering, 2011, 40(5): 915-920.(in Chinese)
[14] Wu X J, Wang X L. A SINS/CNS Deep Integrated Navigation Method Based on Mathematical Horizon Reference[J]. Aircraft Engineering and Aerospace Technology, 2011, 83(1): 26-34.
[15] 杨洁, 王新龙, 陈鼎, 等. GNSS定姿技术发展综述[J]. 航空兵器, 2018(6): 16-25.
Yang Jie, Wang Xinlong, Chen Ding, et al. Review on the Deve-lopment of GNSS Attitude Determination Technology[J]. Aero Weaponry, 2018(6): 16-25.(in Chinese)
[16] Misra P, Enge P. Global Positioning System: Signals, Measurement, and Performance[M]. Massachusetts: Ganga-Jamuna Press, 2006.
[17] Kim S G, Crassidis J, Cheng Y, et al. Kalman Filtering for Relative Spacecraft Attitude and Position Estimation[C]∥AIAA Gui-dance, Navigation, and Control Conference and Exhibit, 2005.
Design of Relative Attitude Determination Method Based on
Gyroscope/BDS for Multi-Aircraft Formation
Lu Kewen1, Wang Xinlong1*, Li Qunsheng2, Chen Ding3
(1. School of Astronautics,Beihang University,Beijing 100083,China;
2. School of Instrumentation Science and Opto-Electronics Engineering, Beihang University, Beijing 100083, China;
3. State Key Laboratory of Space-Ground Information Technology,Beijing 100086,China)
Abstract: It is an important trend in the future aviation field that multi-aircraft formation has strong multi operation ability, high reliability and high efficiency. Continuous and high-precision relative attitude information is essential for formation maintenance or reconstruction, which requires higher accuracy and continuity of relative attitude determination. In order to improve the accuracy and continuity of relative attitude determination, a relative attitude determination scheme based on gyroscope/BDS is designed. BDS differential technology is used to eliminate the common error of carrier phase, and high-precision double difference carrier phase is used to update the measurement, which improves the relative attitude determination accuracy. At the same time, based on the relative attitude model between two aircrafts, the angular velocity measured by gyroscope is used for one-step prediction to solve the problem that the relative attitude determination cannot be gotten when BDS is not available and can improve the continuity of relative attitude determination. Simulation results show that the proposed scheme can achieve high-precision relative attitude determination, and still has high-precision relative attitude determination ability when the number of available satellites is less than four. The research can meet the requirements of multi-aircraft formation for relative attitude determination accuracy and continuity.
Key words: multi-aircraft; formation; relative attitude determination; high precision; continuity; BDS differential technology
