高速无人靶机编队控制研究
2022-05-18郭晓雯岳艳军凡永华闫杰吴宝元
郭晓雯 岳艳军 凡永华 闫杰 吴宝元



摘 要: 针对可模拟四、五代先进战斗机高速高机动能力的固定翼靶机在有限靶场空间内进行实战训练的协同编队控制问题,提出基于一致性理论的改进编队控制律。首先,进行靶机运动学建模; 其次,在一致性理论的基础上,将加速度引入编队控制律中,设计了基于位置、速度、加速度反馈的编队控制律; 进一步,考虑靶场空间限制,提出一种基于路径最短的队形变换策略,以实现快速队形变换。仿真结果表明,所提出的考虑加速度反馈的改进一致性编队控制律在进行编队成形与变换时,能够使靶机编队状态快速收敛到期望值,实现队形的快速调整与稳定保持。
关键词: 无人靶机; 编队控制; 协同控制; 一致性理论; 队形保持; 队形变换
中图分类号: TJ765; V279+.1
文獻标识码: A
文章编号: 1673-5048(2022)02-0072-08
DOI: 10.12132/ISSN.1673-5048.2021.0178
0 引 言
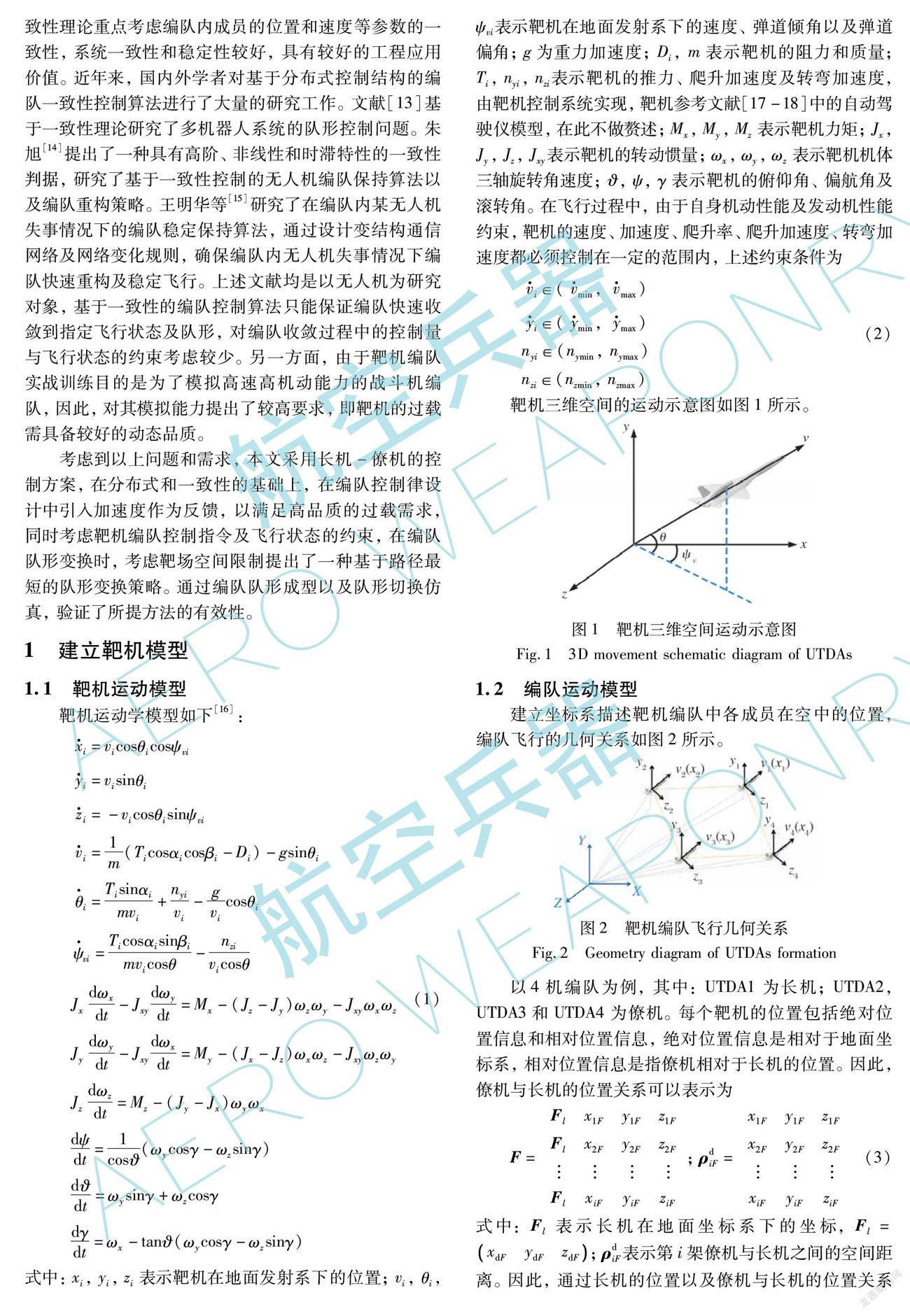
无人靶机(Unmanned target drone aircraft,UTDA),一类具有特殊任务的无人机,在导弹武器系统研制、定型和部队作战训练中,为导弹提供模拟不同特性的空中目标,为飞行员构建训练对抗场景,是名副其实的“蓝天磨刀石”。随着技术的发展,第四、五代战机因其优异的隐身、高速、高机动特性,已成为未来战场的主力。而随着战场环境的日益复杂,各种干扰手段不断升级,相比之下,多架战机联合编队执行任务不仅可以提高作战成功率,而且可以相互配合掩护己方战机,提高战场生存概率,是未来战场的主要作战模式。多战机编队在执行作战任务的过程中,队形保持能够很大程度提高作战效率,如协同探测、追踪保持等; 而随着战场环境的变化,战机队形必须进行重构,才能适应战场局势,如形成协同抗干扰、协同火力打击的队形。因此,能够模拟第四、五代战机编队作战场景的高性能靶机协同编队对导弹武器系统及飞行员的实战化训练具有重要的意义[1-3]。
编队控制问题是靶机协同编队要解决的重要问题,是指在靶机编队飞行的过程中,根据模拟作战场景的任务要求,通过调整速度和姿态形成队形或完成队形切换,使靶标编队迅速构成供靶态势[4]。编队的协同控制结构主要分为集中式控制结构与分布式控制结构[5]。集中式控制结构指整个编队中每个成员的信息传输至控制中心,由控制中心统一规划,将控制指令下达给各编队成员,实现对整个编队的控制。集中式结构计算量大,对通信带宽要求高,适用于处理实时性要求不高、全局性能要求高的任务。与集中式控制结构相比,分布式控制结构没有确定的控制中心,编队各成员通过拓扑网络与连通的成员之间进行信息交互,以合作的方式协同完成任务,具有实时性好、计算量小、灵活性高等优点。本文研究的靶机编队,受限于制造成本,机载控制系统计算能力及通信水平受限,但是任务对于靶机编队的形成及队形切换实时性要求高,同时必须考虑在安全边界受限情况下靶机编队供靶的安全性,因此,本文采用长机-僚机的控制方案,各僚机均能接收长机的信息,僚机之间采用分布式结构获得邻近僚机的信息,既可以确保任务过程中的飞行安全,实现较高的位置控制精度,又可以减小计算量及通信量。
目前的编队控制方法主要包括: 领航跟随法[6]、虚拟结构法[7]、基于行为法[8]、 人工势场法[9]、一致性控
制[10-11]和人工智能控制[12]等。与其他控制方法相比,一致性理论重点考虑编队内成员的位置和速度等参数的一致性,系统一致性和稳定性较好,具有较好的工程应用价值。近年来,国内外学者对基于分布式控制结构的编队一致性控制算法进行了大量的研究工作。文献[13]基于一致性理论研究了多机器人系统的队形控制问题。朱旭[14]提出了一种具有高阶、非线性和时滞特性的一致性判据,研究了基于一致性控制的无人机编队保持算法以及编队重构策略。王明华等[15]研究了在编队内某无人机失事情况下的编队稳定保持算法,通过设计变结构通信网络及网络变化规则,确保编队内无人机失事情况下编队快速重构及稳定飞行。上述文献均是以无人机为研究对象,基于一致性的编队控制算法只能保证编队快速收敛到指定飞行状态及队形,对编队收敛过程中的控制量与飞行状态的约束考虑较少。另一方面,由于靶机编队实战训练目的是为了模拟高速高机动能力的战斗机编队,因此, 对其模拟能力提出了较高要求,即靶机的过载需具备较好的动态品质。
考虑到以上问题和需求,本文采用长机-僚机的控制方案,在分布式和一致性的基础上,在编队控制律设计中引入加速度作为反馈,以满足高品质的过载需求,同时考虑靶机编队控制指令及飞行状态的约束,在编队队形变换时,考虑靶场空间限制提出了一种基于路径最短的队形变换策略。通过编队队形成型以及队形切换仿真,验证了所提方法的有效性。
2.3 队形变换策略
靶机编队飞行过程中,根据模拟场景的任务要求,在到达供靶区域时要进行编队队形变换,迅速形成供靶态势,如协同打击编队构型、协同抗干扰编队构型等。由于受到靶场安全边界的限制,对于靶机编队来说需要在有限的空间内完成快速队形变换,因此,将编队队形变换等效为一种任务分配,优化目标是获得编队队形变换总距离的最小代价,以使编队在最优的总切换距离的时间和空间内收敛。为了降低分布式任务分配的难度,基于KM算法进行任务分配。
考虑N架靶机当前所在的编队节点与新队形的编队节点为两组集合,组内任意两个节点之间没有边相连通,仅在两个集合之间存在边,组成二部图S。任务分配的目标是在从旧节点到新节点的n!个双射匹配中,为各旧节点找到完美匹配的新节点。S中每个元素sij的值表示旧队形相对长机的偏移量与新队形相对长机偏移量两个节点之间的距离dij,即这条边的权重。算法流程如下:
(1)初始化每架靶机可行路线的权重;
(2)采用匈牙利最大匹配算法判断是否有符合条件的增广路;
(3)若找到符合的增广路,则修改当前可行路线的值;
(4)重复步骤(2)和(3),直至找到最佳匹配。
本算法获得的分配是路径和最短的分组,总代价最小。例如,在简化模型中将编队队形从一字型变换为菱形时,KM算法的匹配和筛选结果如图4所示。
3 仿真试验与结果分析
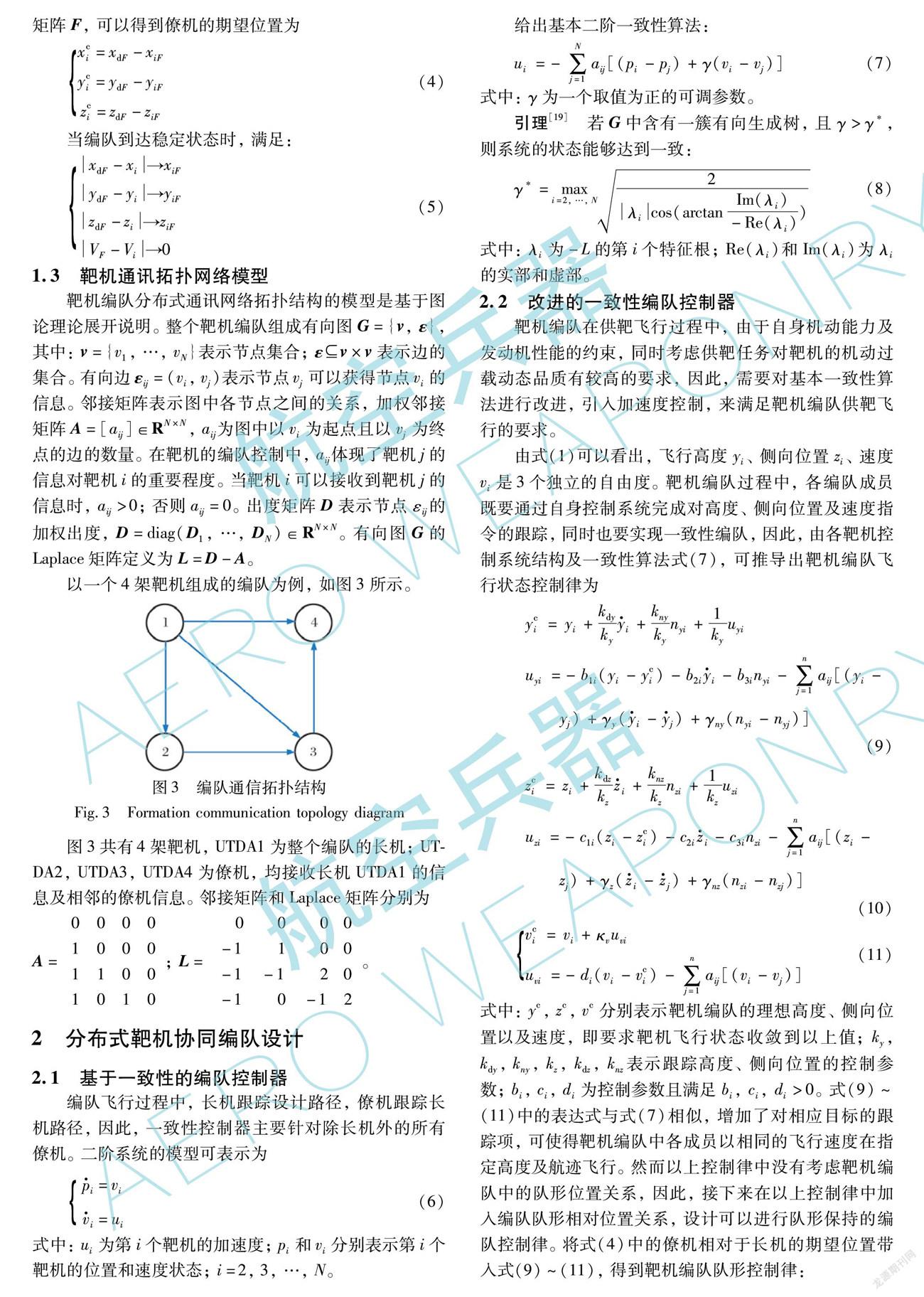
为验证所提改进一致性算法的有效性,以4架靶机组成的编队为例进行仿真分析。首先,验证飞行状态控制律的有效性,同时也表明状态控制律不能收敛到指定队形。然后,对基于改进一致性算法的编队控制进行仿真,表明所提出的编队控制律可较快实现队形切换以及队形切换策略的有效性。编队的通信拓扑结构见图3,僚机接收长机的信息以及相邻靶机的信息。
这里给出两个算例: 算例一场景为靶机编队亚音速爬升至任务剖面; 算例二场景为靶机编队在任务剖面完成超音速的高速队形切换。
3.1 靶机飞行编队队形控制
靶机编队的初始仿真状态如表1所示,约束条件如表2所示,靶机初始队形参数如表3所示。在靶机编队飞行过程中,由于靶机采用涡喷发动机为动力,在爬升至指定的任务剖面时飞行速度为亚音速,假设长机的爬升至任务剖面的理想飞行状态为yc=9 000 m,zc=0 m,vc=270 m/s。一致性算法中参数设置为b1i=b2i=b3i=1, c1i=c2i=c3i=1(i=1,2,3),γx=γy=γz=γny=γnz=4。
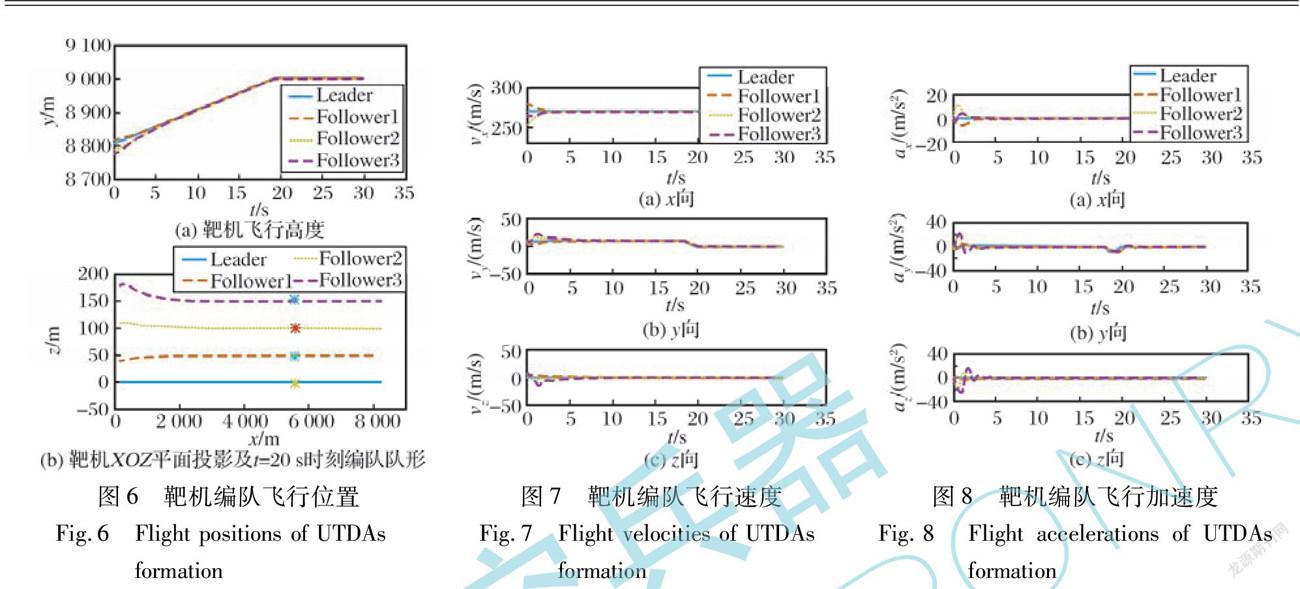
采用改进的编队队形控制算法,得到靶机编队的飞行状态如图5所示。图6~ 8分别为靶机编队的飞行位置、速度及加速度曲线。从图中可以看出,长机按照预定轨迹飞行,僚机采用改进的编队队形控制算法,处于不同初始状态的各僚机的加速度、速度快速趋于长机的状态,各僚机的位置趋于编队期望位置。尽管由于自动驾驶仪的动态响应会使加速度、速度存在一定超调,但是编队的位置曲线较平滑,且较快的收敛形成指定的“一”字横队队形,并保持队形飞行。
3.2 靶机飞行编队队形变换
本文所设计的改进编队队形控制算法也可用于编队队形变换, 本节给出一个队形变换的例子。 设置初始队
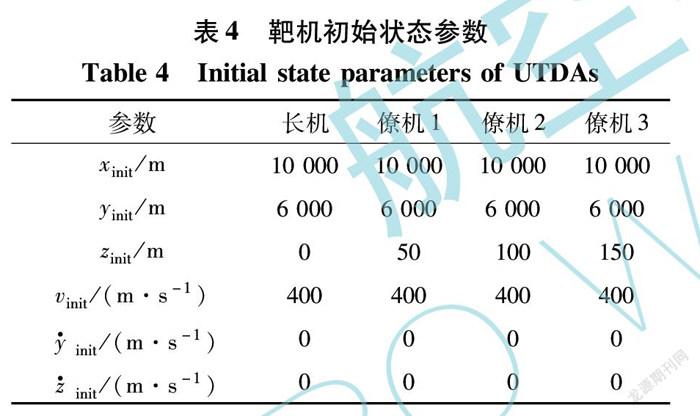
形为3.1节中的队形,靶机编队在指定任务剖面首先以初始队形亚音速编队飞行,之后加速至超音速编队飞行,本节重点研究靶机超音速编队队形变换。靶机编队的初始参数如表4所示,编队变换采用基于KM算法的任务分配方法,分配结果如图9所示。规定长机在队形变换前后的位置均为(xF,yF,zF)=(0,0,0),切换前僚机1~3的位置分别对应为图中一字队形2,3,4号的队形参数,即 (0,0,50),(0,0,100),(0,0,150),切换后僚机1,2,3的位置按照算法分别对应图中菱形队形4,3,2号队形参数,即(-60,100,-80),(-90,50,-40),(-30,-50,40)。
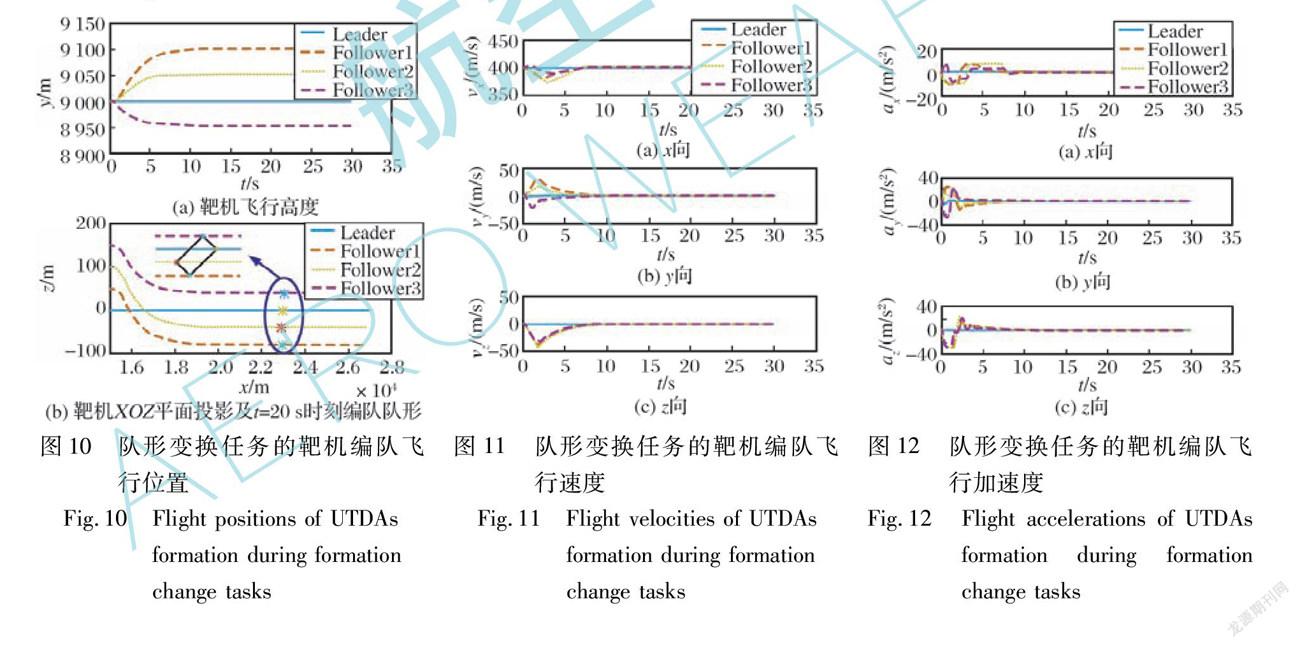
隊形变换任务的靶机编队飞行位置、飞行速度和飞行加速度如图10~12所示。从图10(a)中可以看出,当t=10 s时, 靶机编队队形基本已完成切换,由初始的一
字队形切换为菱形队形,并且在整个队形切换过程中各项飞行参数均满足性能约束条件。从图10(b)中可以看出,僚机1,2的高度比僚机3的高度更快地收敛到指定
队形。分析可知,僚机1仅接收长机信息,而长机在队形切换前后的高度、y向速度保持不变,这对于僚机1的高度、Vy速度收敛快慢基本无影响; 僚机2接收长机和僚机1的信息,而僚机1的高度、y向速度变化方向与僚机2一致, 这会对僚机2的高度、y向速度的收敛产生正向的影响,加快收敛速度。从图10(a)和图11(b)中可以看出,僚机2的y向速度和高度比僚机1更快收敛到指定队形; 僚机3接收长机和僚机2的信息,僚机2的高度、y向速度变化方向与僚机3相反,会减慢僚机3的高度、y向速度的收敛速度。图12中靶机三个方向上的加速度存在一定超调,这是由自动驾驶仪的动态响应引起的。尽管以上靶机编队飞行参数会有一些波动,但是从仿真结果可以看出,靶机编队能较快地完成队形切换并保持新队形飞行,从而验证了本文所提出的改进一致性算法的编队控制算法可以实现编队队形保持及队形切换。
图13对比了改进算法与二阶一致性算法对编队队形切换的速度、高度及侧向位置的影响。可以看出,与二阶一致性算法相比,改进算法由于在控制量中引入对期望位置的跟踪,同时考虑了速度项和加速度项,因此会在不同程度上缩短编队队形的收敛时间。尤其当该靶机与接收信息靶机的高度、侧向位置的变换趋势一致时,收敛效果更加显著。从图中可以看出, 改进算法的编队队形收敛时间较二阶一致性算法相比,由14 s左右减小至11 s左右,收敛时间有明显提升,有效加快了编队队形收敛。
4 结 论
本文针对高速固定翼靶机协同编队控制问题开展研究,设计了一种引入加速度反馈的改进一致性靶机编队控制算法。相较于二阶一致性算法,改进算法能够有效缩短编队队形的收敛时间,使得编队更快到达期望队形。在编队队形变换过程中采用匈牙利算法实现队形变换过程中距离代价最小,从策略层面缩短队形切换时间。仿真表明,所设计的改进一致性编队控制算法可以用于靶机编队队形成形、变换等任务,可以快速、稳定地实现期望编队队形的保持与切换,完成相应的靶机编队协同任务,且结构简单,具有较好的工程实用性。未来的工作中,将以仿真试验验证部分作为重要的研究内容,以某高速靶机为平台,完成编队飞行试验,从而进一步验证所提方法的有效性。
参考文献:
[1] 王道波, 任景光, 蒋婉玥, 等. 无人靶机及其自主控制技术发展[J]. 科技导报, 2017, 35(7): 49-57.
Wang Daobo, Ren Jingguang, Jiang Wanyue, et al. An Overview of the Development of Target Drones and Associated Autonomous Control[J]. Science & Technology Review, 2017, 35(7): 49-57.(in Chinese)
[2] 王正青. 面向实战摸清底数——谈复杂环境与边界条件下的武器装备试验鉴定[J]. 现代防御技术, 2019, 47(5): 1-7.
Wang Zhengqing. Combat Oriented Base Performance Testing: Testing Identification of Weapon System in Complex Scenes and Boundary Conditions[J]. Modern Defence Technology, 2019, 47(5): 1-7.(in Chinese)
[3] 李鹏举, 毛鹏军, 耿乾, 等. 无人机集群技术研究现状与趋势[J]. 航空兵器, 2020, 27(4): 25-32.
Li Pengju, Mao Pengjun, Geng Qian, et al. Research Status and Trend of UAV Swarm Technology[J]. Aero Weaponry, 2020, 27(4): 25-32.(in Chinese)
[4] 方斌, 许瑞, 高翔, 等. 靶机装备现状与发展需求[J]. 科技导报, 2020, 38(20): 50-56.
Fang Bin, Xu Rui, Gao Xiang, et al. The Current State and the Development Requirement of Target Drones[J]. Science & Technology Review, 2020, 38(20): 50-56.(in Chinese)
[5] 韩亮, 任章, 董希旺, 等. 多无人机协同控制方法及应用研究[J]. 导航定位与授时, 2018, 5(4): 1-7.
Han Liang, Ren Zhang, Dong Xiwang, et al. Research on Cooperative Control Method and Application for Multiple Unmanned Aerial Vehicles[J]. Navigation Positioning and Timing, 2018, 5(4): 1-7.(in Chinese)
[6] 赖云晖, 李瑞, 史莹晶, 等. 基于图论法的四旋翼三角形结构编队控制[J]. 控制理论与应用, 2018, 35(10): 1530-1537.
Lai Yunhui, Li Rui, Shi Yingjing, et al. On the Study of a Multi-Quadrotor Formation Control with Triangular Structure Based on Graph Theory[J]. Control Theory & Applications, 2018, 35(10): 1530-1537.(in Chinese)
[7] 邵壮, 祝小平, 周洲, 等. 三维动态环境下多无人机编队分布式保持控制[J]. 控制与决策, 2016, 31(6): 1065-1072.
Shao Zhuang, Zhu Xiaoping, Zhou Zhou, et al. Distributed Formation Keeping Control of UAVs in 3-D Dynamic Environment[J]. Control and Decision, 2016, 31(6): 1065-1072.(in Chinese)
[8] Shin J, Kim S, Suk J. Development of Robust Flocking Control Law for Multiple UAVs Using Behavioral Decentralized Method[J]. Journal of the Korean Society for Aeronautical & Space Sciences, 2015, 43(10): 859-867.
[9] Harder S A, Lauderbaugh L K. Formation Specification for Control of Active Agents Using Artificial Potential Fields[J]. Journal of Intelligent & Robotic Systems, 2019, 95(2): 279-290.
[10] Yan M D, Zhu X, Zhang X X, et al. Consensus-Based Three-Dimensional Multi-UAV Formation Control Strategy with High Precision[J]. Frontiers of Information Technology & Electronic Engineering, 2017, 18(7): 968-977.
[11] 張苗苗, 魏晨. 基于边Laplacian一致性的多无人机编队控制方法[J]. 中国科学: 技术科学, 2017, 47(3): 259-265.
Zhang Miaomiao, Wei Chen. Multi-UAV Formation Control Method Based on Edge Laplacian Consensus[J]. Scientia Sinica Technologica, 2017, 47(3): 259-265.(in Chinese)
[12] Guzey H M, Dierks T, Jagannathan S, et al. Modified Consensus-Based Output Feedback Control of Quadrotor UAV Formations Using Neural Networks[J]. Journal of Intelligent & Robotic Systems, 2019, 94(1): 283-300.
[13] Liu T F, Jiang Z P. Distributed Formation Control of Nonholono-mic Mobile Robots without Global Position Measurements[J]. Automatica, 2013, 49(2): 592-600.
[14] 朱旭. 基于信息一致性的多無人机编队控制方法研究[D]. 西安: 西北工业大学, 2014.
Zhu Xu. Research on Multi-UAV Formation Control Based on Information Consensus[D]. Xi’an: Northwestern Polytechnical University, 2014. (in Chinese)
[15] 王明华, 胡士强. 变结构三阶一致性无人机编队控制[J]. 计算机仿真, 2021, 38(4): 302-305.
Wang Minghua, Hu Shiqiang. Variable Structure Formation Control of Quadrotors Based on Third-Order Consensus Algorithm[J]. Computer Simulation, 2021, 38(4): 302-305.(in Chinese)
[16] Cook M V. Flight Dynamics Principles: A Linear Systems Approach to Aircraft Stability and Control [M]. 3rd ed. Oxford: Butterworth-Heinemann, 2013.
[17] Mracek C P, Ridgely D B. Missile Longitudinal Autopilots: Connections between Optimal Control and Classical Topologies[C]∥AIAA Guidance, Navigation, and Control Conference and Exhi-bit, 2005.
[18] 朱学平, 杨军, 袁博, 等. 固定翼无人机编队集结控制算法研究[J]. 导航定位与授时, 2020, 7(5): 128-133.
Zhu Xueping, Yang Jun, Yuan Bo, et al. Research on Formation Control of Multiple Fixed-Wing UAVs[J]. Navigation Positioning and Timing, 2020, 7(5): 128-133.(in Chinese)
[19] Ren W. Consensus Based Formation Control Strategies for Multi-Vehicle Systems[C]∥American Control Conference, 2006: 4237-4242.
Research on Formation Control Technologies of
High-Speed Unmanned Target Drone Aircraft
Guo Xiaowen1, Yue Yanjun2, Fan Yonghua3*, Yan Jie3, Wu Baoyuan1
(1. Xi’an Aerospace Propulsion Institute, Xi’an 710100, China;
2. Shanghai Electro-Mechanical Engineering Institute, Shanghai 201109, China;
3. School of Astronautics, Northwestern Polytechnical University, Xi’an 710072, China)
Abstract: Aiming at the problem of coordinated formation control of fixed-wing unmanned target drone aircraft(UTDA) that can simulate the high-speed and high-maneuverability of the fourth and fifth generation advanced fighters in the actual combat training within a limited flight aera, an improved consensus-based formation control law is proposed. Firstly, the kinematics model of the UTDA is established. Secondly, based on the consensus theory, the acceleration is considered, and a formation control law is designed with the feedback of position, velocity and acceleration. Furthermore, considering the limited flight aera, a formation change strategy is proposed based on the shortest path to achieve rapid formation change. The simulation results show that the proposed improved consensus formation control law considering acceleration feedback can make the formation state of the UTDA converge to the expected values quickly, and realize the rapid formation adjustment and stable formation keeping.
Key words: unmanned target drone aircraft; formation control; coordinated control; consensus theory; formation keeping; formation switching
