基于变滞环阈值DITC 的转矩脉动抑制研究
2022-05-13宋士华
蔡 燕,宋士华
(天津工业大学 天津市电工电能新技术重点实验室,天津 300387)
开关磁阻电机(Switched Reluctance Motor,SRM)结构简单、鲁棒性好,适用于高温等恶劣环境,正逐渐替代传统电机。为了更好地实现SRM 驱动系统的良好性能,提高驱动系统的可靠性,国内外学者进行了多方面的研究,其中,电机瞬时转矩脉动较大的问题仍然是限制SRM 在更多范围内应用并发挥其优势的主要障碍。由于SRM 双凸极的结构、开关式的供电方式以及高度非线性的电磁特性,导致其转矩脉动较大。目前,专家学者们主要从优化电机结构和选用先进的控制策略等方面来抑制转矩脉动。通过对电机定转子极距设计和优化极数等方式,可在一定程度上抑制转矩脉动,但无法消除瞬时转矩脉动,而瞬时转矩脉动通常通过优化控制策略的方法来抑制。传统抑制转矩脉动的控制策略多为间接转矩控制,其主要是通过控制电流或磁链等随参考转矩变化的变量,来达到控制输出转矩的目的。由于SRM 高度非线性的电磁特性,实际中很难获得参考转矩与电流或磁链间的精确关系,并且引入电流等中间量后增加了控制的复杂度。文献[7]提出直接瞬时 转 矩 控 制(Direct Instantaneous Torque Control,DITC),该方法直接对参考转矩和瞬时转矩进行比较得到绕组所需的参考电压,简化了SRM 系统的结构,显著降低了转矩脉动。
对于SRM 来说,转矩脉动问题一直是研究的热点和重点,采取的控制策略对转矩脉动有较大的影响。文献[8]对传统DITC 控制方法进行了改进,采用双滞环控制的方法使两相绕组配合工作以抑制转矩脉动,响应迅速、鲁棒性好,然而其固定滞环阈值的滞环策略只适用于特定的工况;文献[9]提出了基于脉冲宽度调制技术的DITC 系统,通过对转矩偏差与滞环阈值进行比较得到绕组所需要的电压矢量,进一步减小了SRM 的转矩脉动,但忽略了负载及转速对控制的影响。为抑制重叠导通区域的转矩脉动,文献[10]优化了滞环策略,即当转矩偏差低于滞环阈值时,下一相进入退磁模式以减小合成转矩,但该方法使下一相的电流建立缓慢,延长了换相时间。文献[11]利用RBF 神经网络逼近性能优越的特点,提出基于RBF 神经网络的DITC 策略。该方法通过离线训练电流得到最佳电流波形,并采用电流跟踪控制的方法来提高系统的稳定性,但计算复杂。文献[12]根据SRM 开通角和磁化曲线的关系,提出了一种基于参数识别的DITC 控制系统,通过优化开通角来抑制转矩脉动,但其控制复杂,削弱了SRM 的鲁棒性。
为了更有效地抑制转矩脉动,本文对传统DITC控制方法进行了优化,针对不同工况制定基于最小二乘法模型预测的转矩滞环阈值在线寻优方案,对1 台1.5 kW 三相12/8 极SRM 样机进行仿真,并通过实验证明所提DITC 系统可有效抑制SRM 的转矩脉动。
1 DITC 控制策略
1.1 DITC 结构
由于SRM 的双凸极结构、高度非线性的电磁特性及开关式的供电方式,导致其输出转矩与参考转矩存在较大误差,而DITC 系统可直接对参考转矩和瞬时转矩进行比较得到所需参考电压,无需将参考转矩转换为参考电流,简化了控制系统的结构,其控制系统结构如图1 所示,包括滞环控制器、开关表、转矩计算和功率电路等单元。
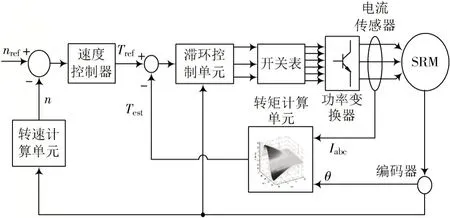
图1 DITC 系统结构框图
1.2 不对称半桥电路
在DITC 系统中,通常采用不对称半桥电路作为SRM 绕组和电源进行能量交换的桥梁,其拓扑结构如图2 所示,每相桥臂由2 个主开关器件和2 个续流二极管组成,可独立运行在不同状态,并且在直流电源的输入端并联一个用于稳定母线电压和吸收绕组回馈能量的电容。
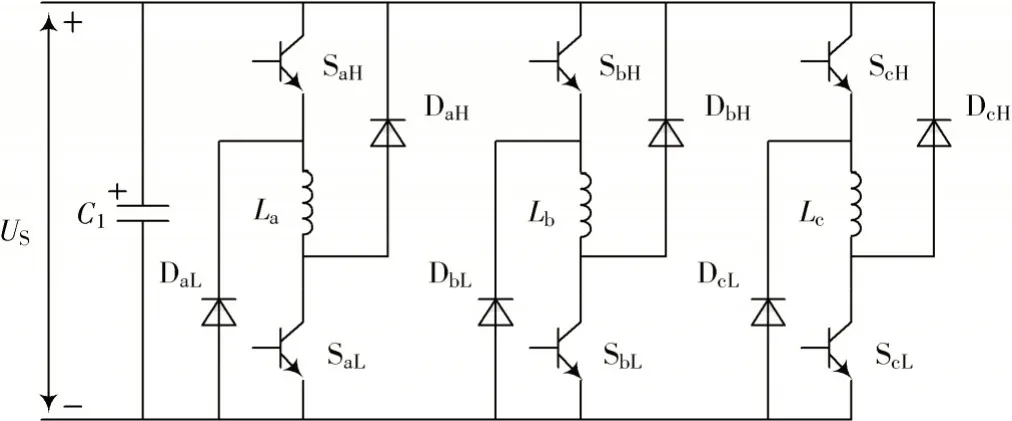
图2 不对称半桥电路拓扑结构
使用不对称半桥电路可以方便地实现电流斩波控制、电压斩波控制、单脉冲电压控制等方式。以a 相为例,在不同的开关状态下,可以灵活地将正、零或负压施加到SRM 相绕组两端,使其工作在励磁、续流和退磁三种不同的模式,如图3 所示。
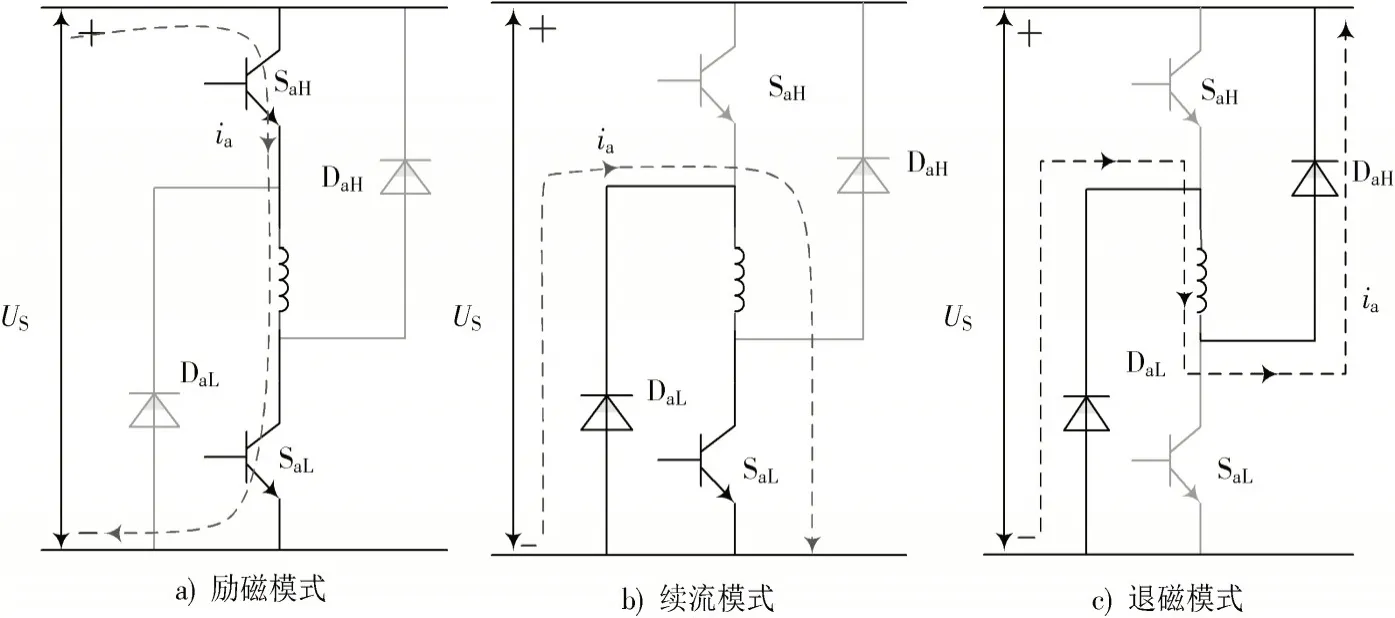
图3 不对称半桥电路的三种工作模式
1.3 DITC 滞环策略
DITC 将瞬时转矩作为被控对象,具有良好的转矩跟踪能力。在SRM 运行期间,为了维持输出转矩的稳定,根据相邻两相瞬时输出转矩的不同,把转子位置产生正转矩的部分划分为3 个区域,如图4 所示。在图4中,区域1 和2 是换相区间,此时a,b 相邻两相都导通;区域3 是b 相单相导通区间。和分别是b 相和c 相的开通角,其值取决于负载和转速;是定子与转子相遇的起点;是定转子对齐位置。
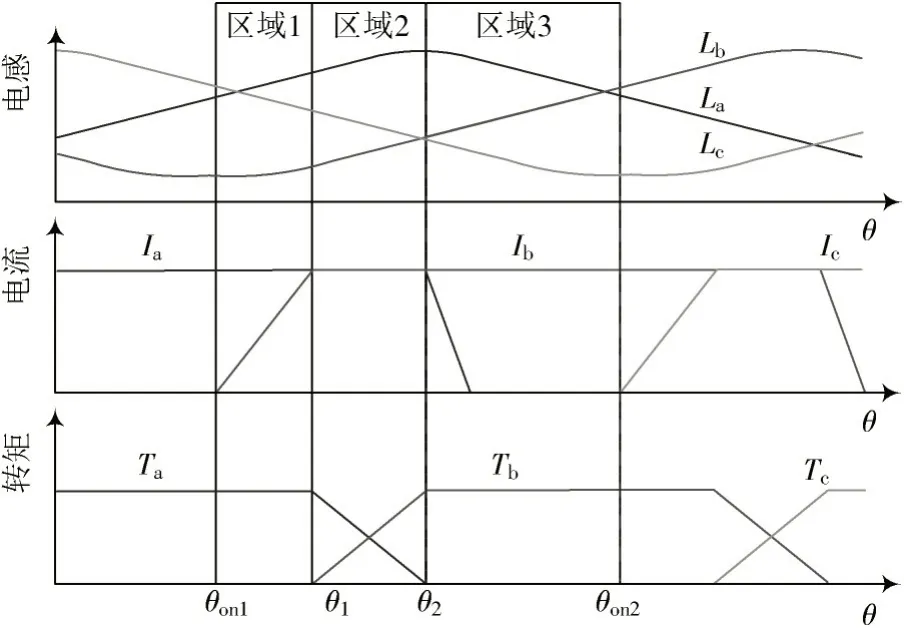
图4 DITC 的电感⁃电流⁃转矩分区示意图
基于不对称半桥电路的DITC 滞环策略如图5 所示,其中瞬时转矩偏差Δ定义为:

式中和分别是参考转矩和实际转矩。
在图5 中,和分别为外、内滞环阈值,实线和虚线对应实际瞬时转矩的上升和下降过程。下面以单相导通过程来说明控制方案,如图5 所示,在b 相单相导通区域内,a 相绕组工作在-1 状态,其电流迅速减小到0;b 相处于电感上升期间,电感变化率较大,也已建立起电流,由b 相单独输出转矩。假设b 相初始状态为1,实际转矩将继续增加,当Δ到0 时,说明此时与相等,开关状态变为0,施加到绕组两端的电压也为0,以使转矩缓慢变化;当Δ到-时,代表已远大于,采用-1 状态,施加到绕组两端电压为-,以使转矩迅速下降,此过程可将b 相瞬时输出转矩稳定在一定范围内。瞬时转矩上升过程与此类似。当电机处于重叠导通区域1 和区域2 时,转矩是由两相同时提供的,在不同转子位置处每相的瞬时输出转矩也不同,需要即时调节两相绕组工作状态,以使两相合成转矩稳定在一定范围内,其滞环策略如图6 所示。
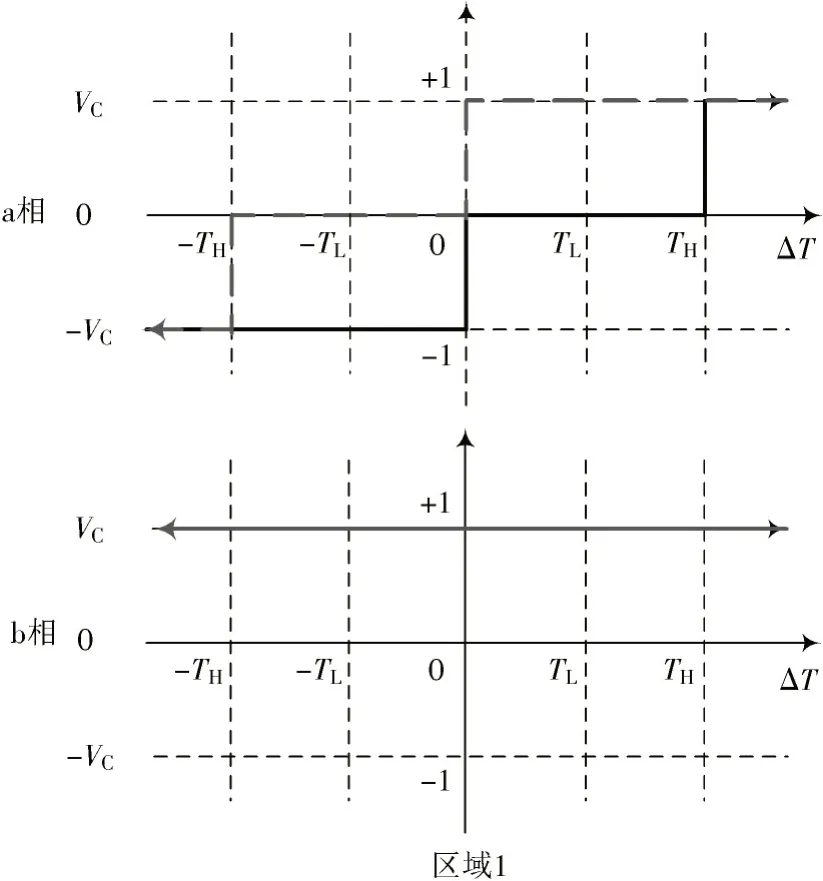
图5 单相导通区域滞环策略
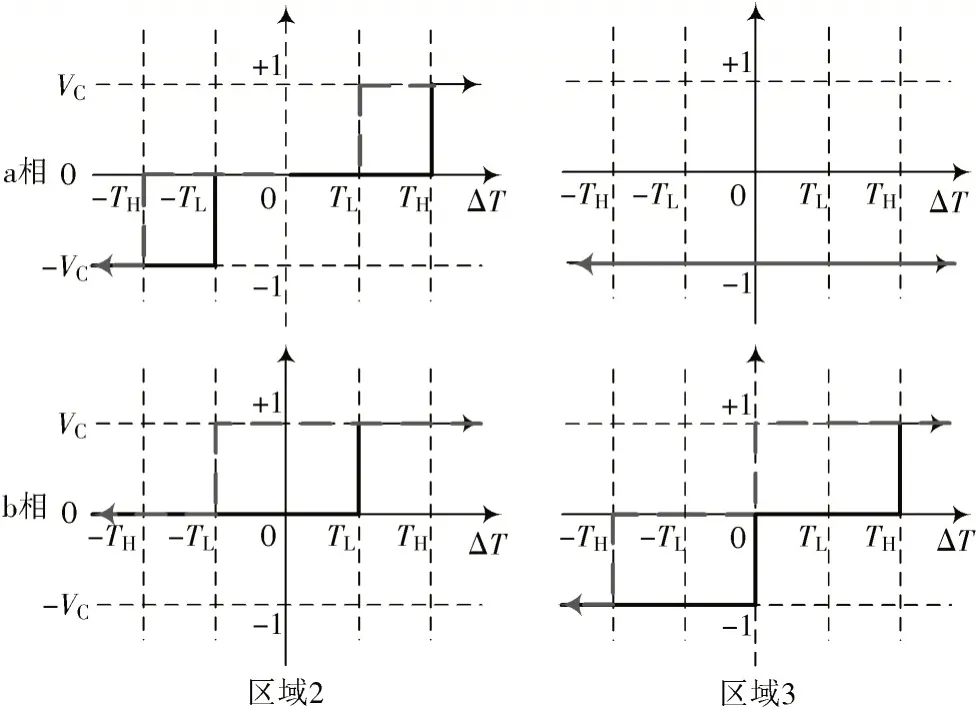
图6 重叠导通区域滞环策略
2 变滞环阈值研究
对于SRM 的DITC 控制系统而言,转矩滞环为其核心控制器,很大程度上影响着DITC 驱动系统的控制效果。DITC 的滞环阈值一般为针对额定工况离线计算的,在额定工况附近对转矩脉动有较好的抑制效果,偏离额定工况后转矩脉动的抑制效果会变差,具有一定局限性。转矩滞环控制器根据滞环阈值将转矩偏差限制在一定范围内,理论上来讲,滞环阈值越小,相应的转矩偏差越小,也就意味着转矩脉动越小。但实际上,滞环阈值并不是越小越好。本节对其影响因素进行详细研究,并提出一种基于最小二乘法模型预测的滞环阈值在线寻优方案。
2.1 控制参数的选取
控制参数的选取决定着SRM 各种控制方法的运行性能和效率,比如开关角的选取对于角度位置控制方法来说极为重要。本文采用遍历法找到各个工况下的最优角度,并应用到实际中。滞环阈值的选取对转矩脉动的影响较大,转矩脉动程度可由转矩脉动系数表示为:

式中:为一个周期内最大输出转矩;为该周期内最小输出转矩;为该周期内平均转矩。
在不同负载下,输出转矩分布特征也有区别,如图7a)所示。采用转矩滞环控制时,转矩偏差处于滞环阈值外会迅速动作,进行转矩控制,当滞环阈值较大,负载较小时,转矩控制不灵敏,不能有效抑制转矩脉动。
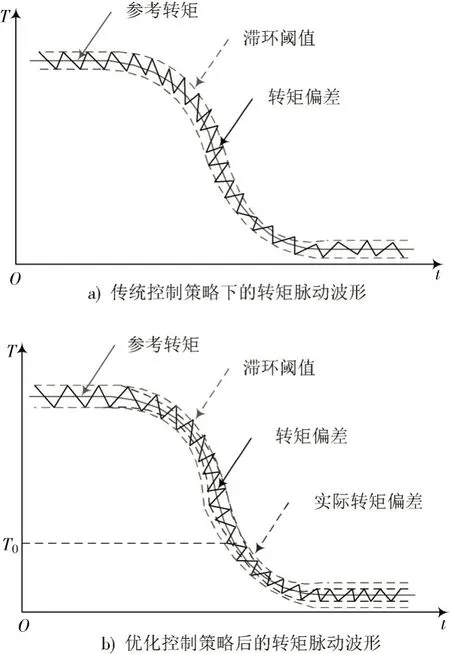
图7 不同负载下的转矩脉动
为了克服在滞环阈值内不动作、滞环阈值外强制动作导致不可避免的转矩脉动,滞环阈值应随负载的变化做出相应的调节,如图7b)所示。在图7b)中,当负载低于后,滞环阈值不能再继续减小,这是由于功率开关器件的开关频率及系统采样频率的约束。因此,设计基于最小二乘法模型预测的滞环阈值在线寻优方案。
2.2 在线寻优方案
本文通过改变内滞环阈值和外滞环阈值,找到最小的转矩脉动系数,此时的内外滞环阈值即为最优值,。在线寻优的基本思想是:系统按照给定的初始滞环阈值运行,当系统达到稳定状态后,在滞环阈值所设定的范围内对其进行调整,进行滞环阈值的在线寻优工作,当对某一滞环阈值进行增加或减小后,相应的转矩脉动系数都大于当前值,则该值为最优滞环阈值,此时停止寻优并输出当前滞环阈值。
为了提高寻优速度,没有同时进行寻找最优内滞环阈值和最优外滞环阈值的工作,而是先固定内滞环阈值为外滞环阈值的1 2 后,再寻找最优外滞环阈值,然后在最优外滞环阈值确定的条件下寻找最优内滞环阈值。下面以外滞环阈值为例进行寻优过程的说明。
首先使系统达到稳定运行状态,在离线计算的外滞环阈值附近采样,得到包含此外滞环阈值在内的3 组采样点,利用最小二乘法拟合出一条曲线:

同时对3 组值进行计算,找到最小的转矩脉动系数,然后预测增大使外滞环阈值到′时转矩脉动系数的变化情况,其中为任意整数,为每次滞环阈值可变化的最小值。如果预测转矩脉动系数变小,则将外滞环阈值调整为′并采样计算转矩脉动系数,否则预测外滞环阈值增大(-1)后的转矩脉动系数。如果以最小单位调整外滞环阈值预测的转矩脉动系数仍比当前大,则预测减小时′的转矩脉动系数。重复上述过程,当增加新的采样点时,要用其替换旧采样点,然后再拟合、预测、比较,直到在某一滞环阈值以最小单位增加或减小滞环阈值时转矩脉动系数都大于当前最小值,则认为此时的外滞环阈值为最优值,然后固定在处,再以同样的方法寻找。最优化内、外滞环阈值控制流程如图8 所示,图中可代表,。
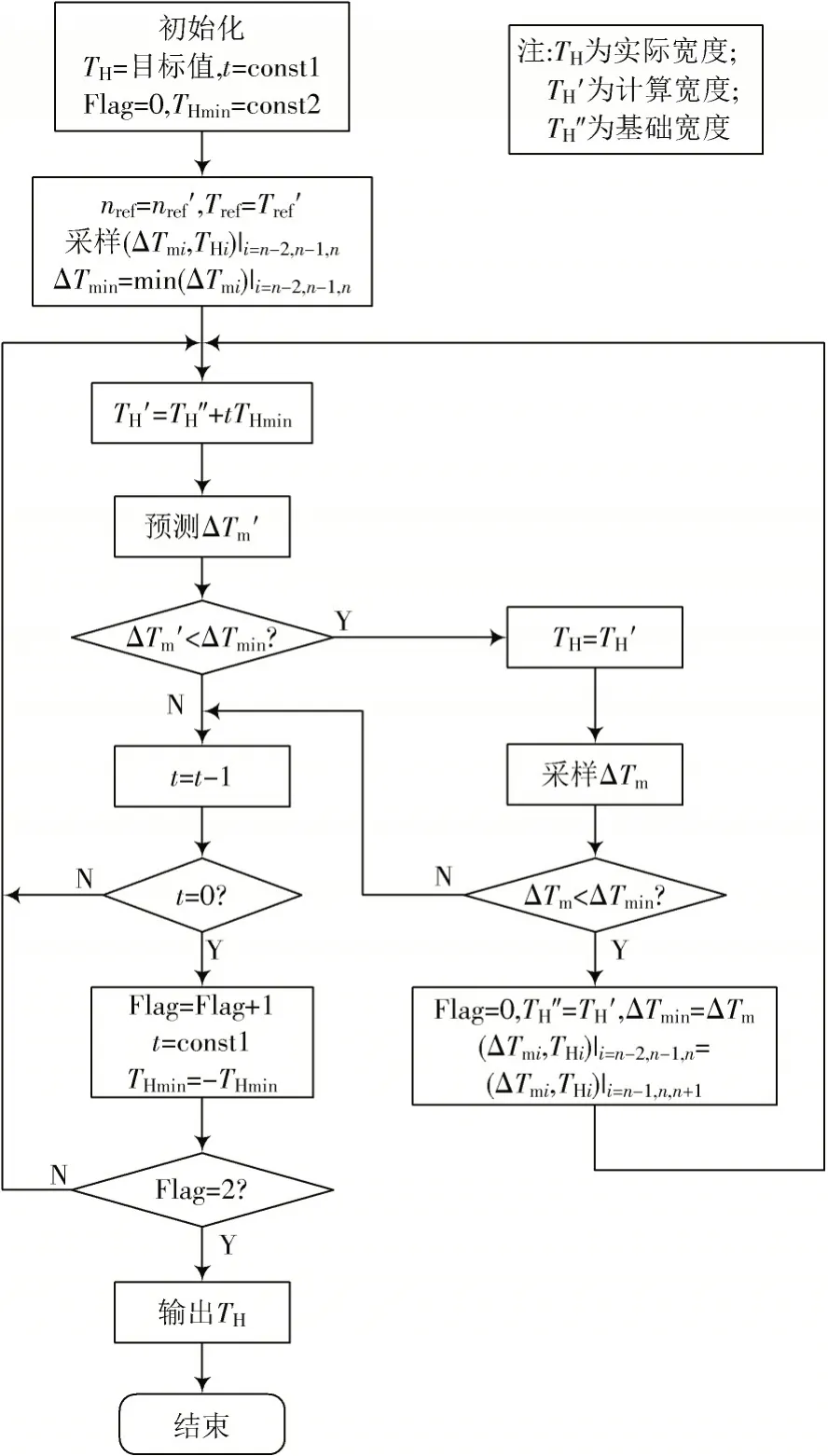
图8 最优化内、外滞环阈值控制流程
3 仿真与实验
3.1 仿真分析
为了验证所提出的控制策略对抑制转矩脉动的优越性,本文利用Matlab/Simulink 平台对1 台1.5 kW,额定速度1 500 r/min,额定负载9.55 N·m 的样机进行仿真。由于SRM 具有高度的非线性,难以用公式计算出电机的瞬时转矩,而瞬时转矩是直接控制的变量,其精确度直接影响功率变换器的控制效果,因此本文通过建立神经网络数学模型,对实验测量的电机特性数据样本进行训练,得到如图9 所示的⁃⁃特性图,然后利用查表法获取SRM 的瞬时转矩。
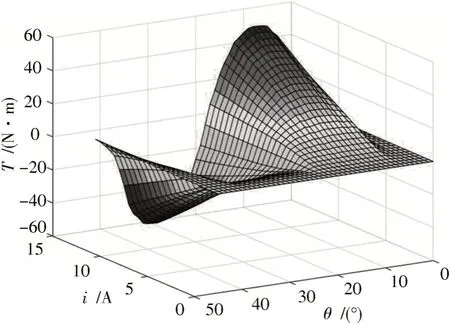
图9 SRM 的T⁃i⁃θ 特性图
仿真时,设置开关器件的最大开关频率为10 kHz。经过大量仿真实验得知,当外滞环阈值为内滞环阈值2 倍时,转矩脉动的抑制效果较优,故以此为基础进行滞环阈值对转矩脉动影响的研究,额定速度为900 r/min,负载为4 N·m 时,不同滞环阈值对转矩脉动影响的结果如表1 所示。从表1 可以看出,不同的滞环阈值对转矩脉动系数的影响也不同,所以应根据实际控制条件来设定滞环阈值。
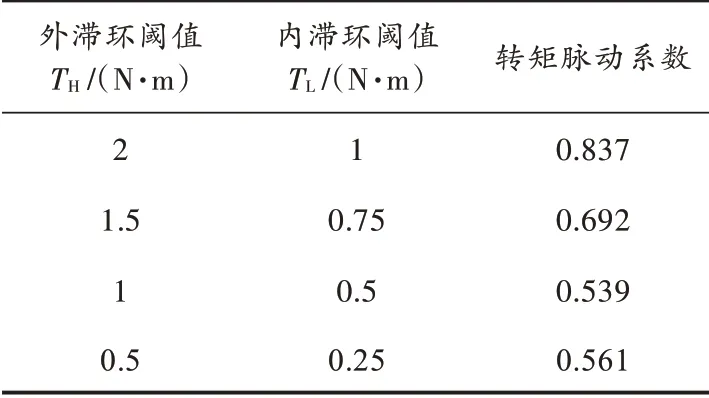
表1 不同滞环阈值时转矩脉动系数对比
图10 和图11 分别为传统DITC 系统与所提出DITC系统在速度为900 r/min、负载为4 N·m 时的仿真结果,其外滞环阈值分别为1.1 N·m 和0.6 N·m。分析图10可以发现,运行过程中功率器件开关次数较少,相电流变化范围较大,相转矩输出不稳定,这是因为滞环阈值选取不合理,使得转矩控制器不灵敏,导致转矩偏差较大,转矩脉动较大。
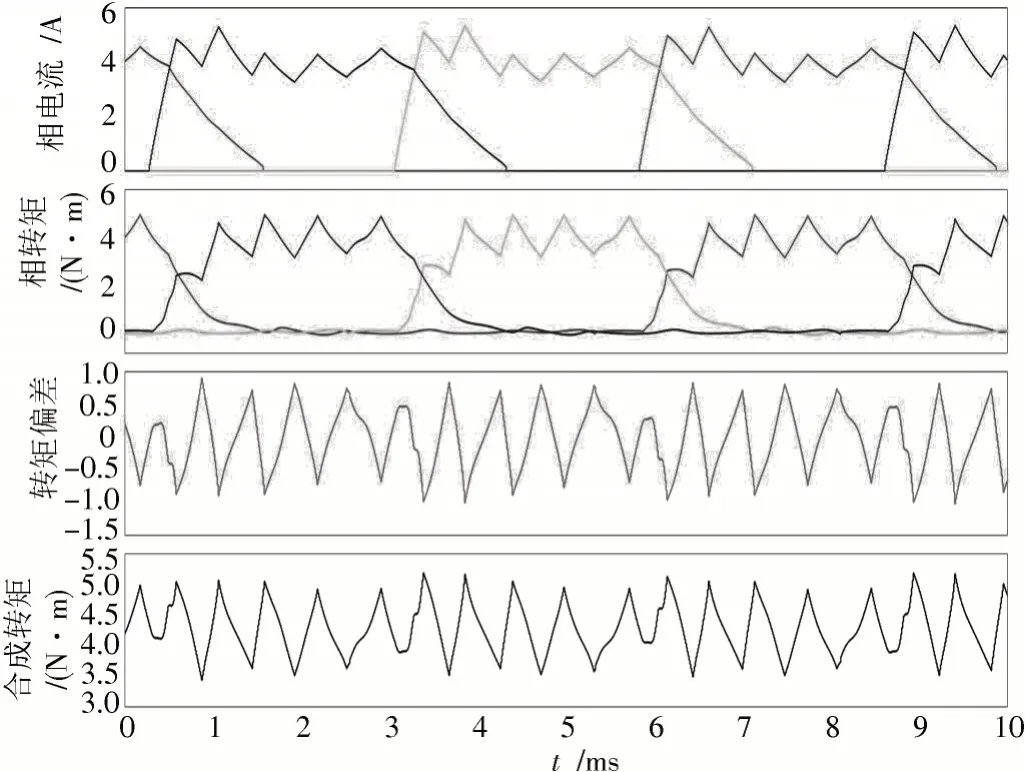
图10 传统DITC 系统仿真结果(900 r/min,4 N·m)
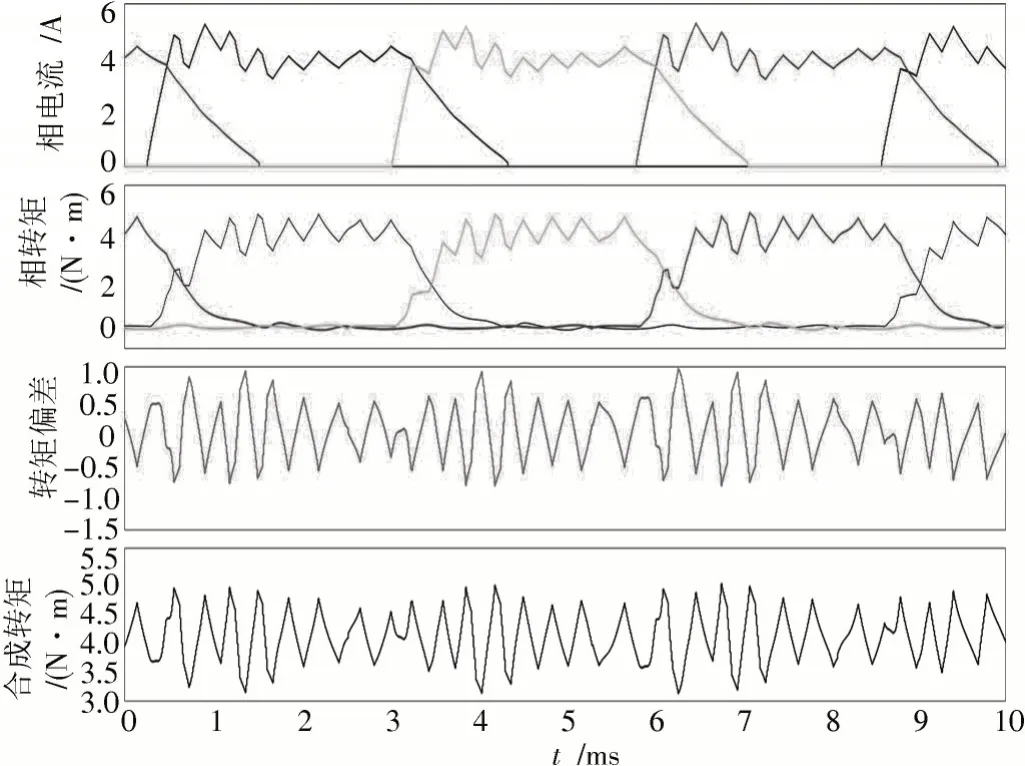
图11 所提出DITC 系统仿真结果(900 r/min,4 N·m)
从图11 中可以看出,由于滞环阈值较小,增加了斩波频率,相电流能够维持在期望值附近,从而瞬时输出转矩更稳定。同时,由于滞环阈值较小,提高了控制的灵敏度,限制了开通相电流上升的幅值,提高了系统的效率。
图12 和图13 分别为传统DITC 系统与所提出DITC系统在速度为1 600 r/min、负载为8 N·m 时的仿真结果,其外滞环阈值分别为1.1 N·m 和1.2 N·m。分析图12 可知,由于滞环阈值较小,转矩偏差处于滞环阈值之外,加上主开关器件开关频率的约束,导致转矩控制的震荡,使电流变化范围较大,转矩脉动增大。而图13中,相电流变化较为平稳,瞬时输出转矩更平滑。同时,由于滞环阈值较大,降低了主开关器件的开关频率和开关损耗。
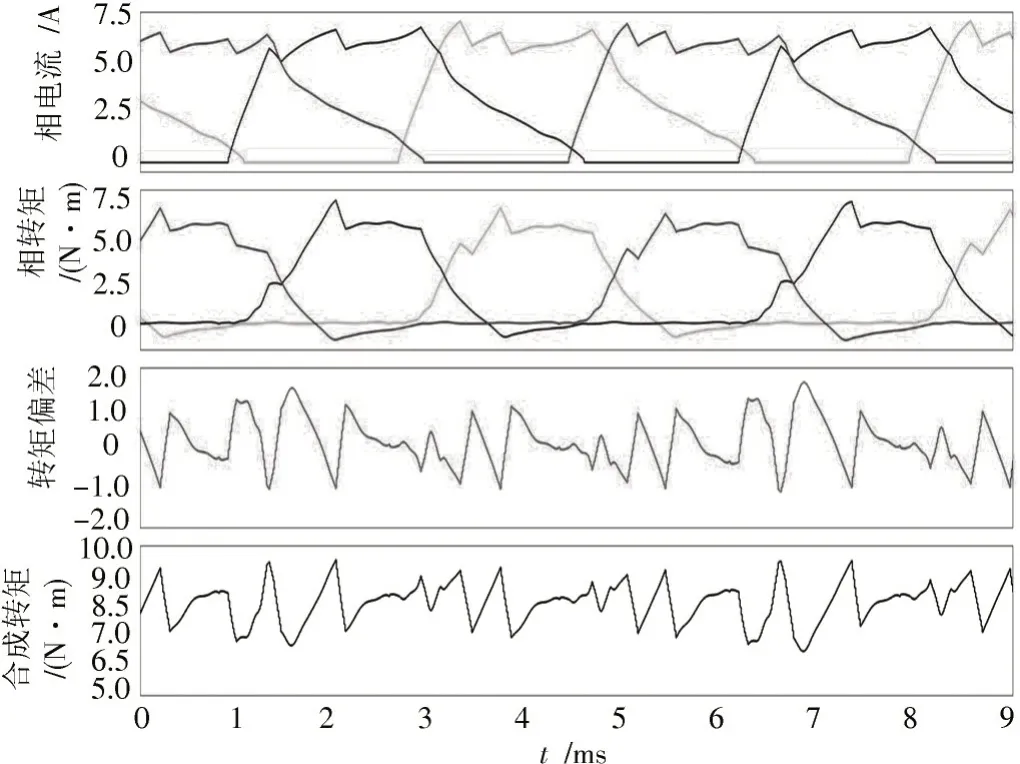
图12 传统DITC 系统仿真结果(1 600 r/min,8 N·m)
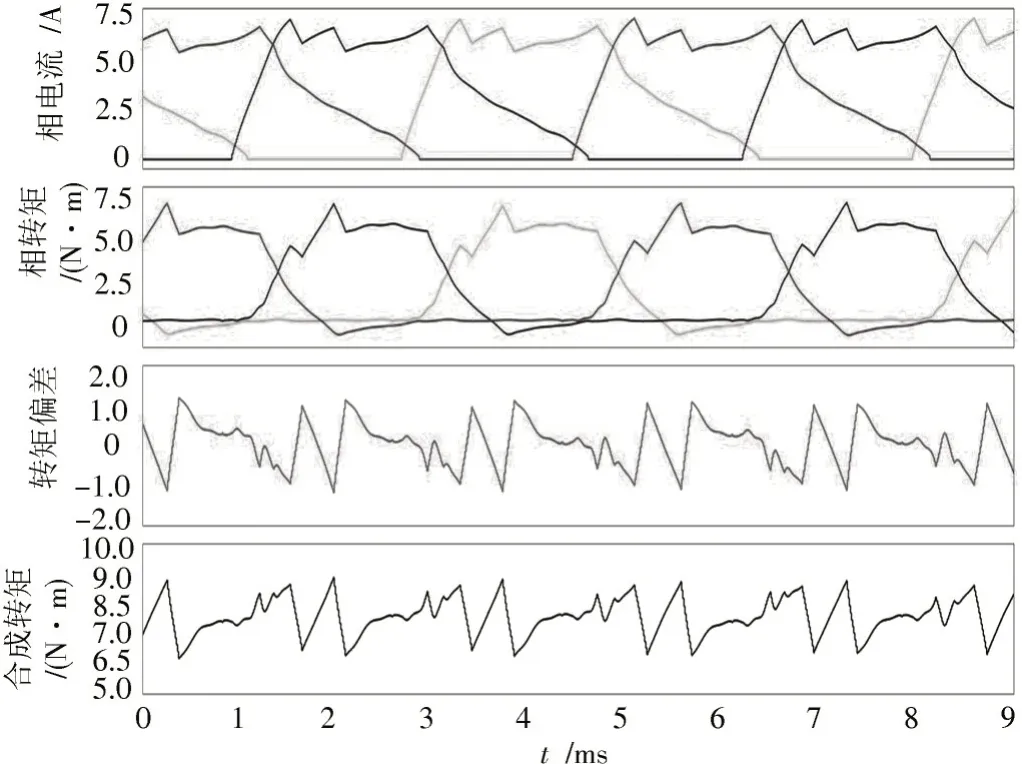
图13 所提出DITC 系统仿真结果(1 600 r/min,8 N·m)
3.2 实验验证
本文所设计的SRM 实验平台如图14 所示,包括控制器、上位机、SRM 样机及多通道录波仪等部分。其中,SRM 样机的额定转速为1 500 r/min,额定电压为514 V,额定功率为1.5 kW。
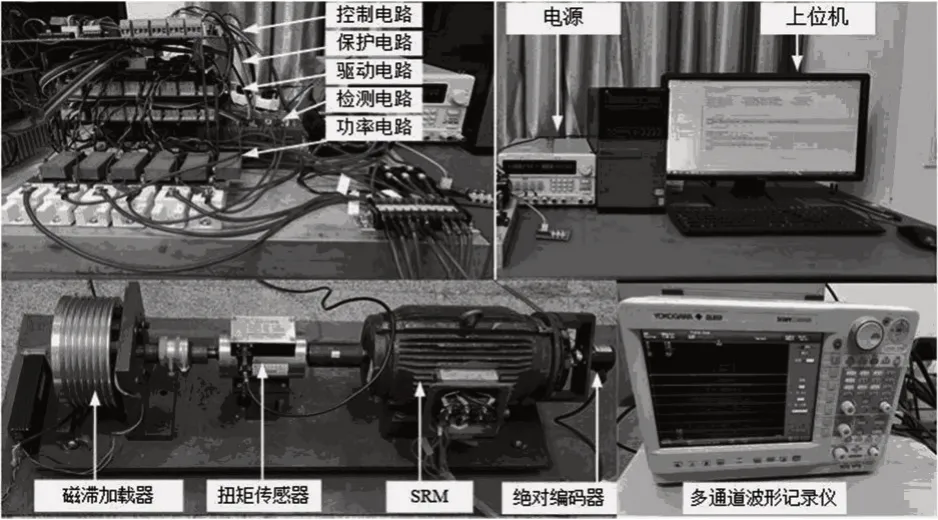
图14 SRM 实验平台
图15 和图16 分别为传统DITC 系统与所提出DITC系统在速度为900 r/min、负载为4 N·m 时的实验结果。对比两图可知,所提出的DITC 系统可以根据实际工况对滞环阈值进行调整,有效地将转矩偏差约束在一定范围内,提高了转矩跟踪性能,达到了减小转矩脉动的目的。
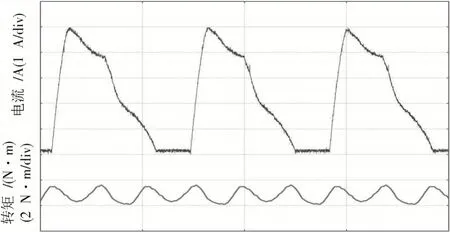
图15 传统DITC 系统实验结果(900 r/min,4 N·m)
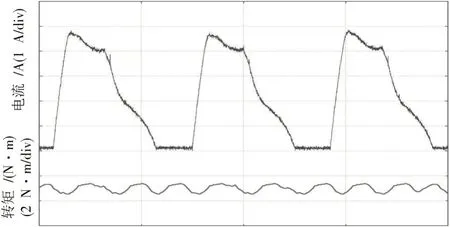
图16 所提出DITC 系统实验结果(900 r/min,4 N·m)
4 结论
针对SRM 转矩脉动较大的问题,本文提出一种基于最小二乘法模型预测的滞环阈值在线寻优的DITC 方案,基于Matlab/Simulink 平台搭建电机控制模型,并与传统DITC 进行比较分析。仿真结果表明,滞环阈值受到负载转矩、开关器件的开关频率和系统采样频率等的影响,该方法可使电流变化更平缓,有效减小转矩偏差,实现合成转矩的平滑过渡;滞环阈值的预测使SRM 系统具有良好的转矩跟踪特性,实现了转矩脉动的抑制。此外,该方法还可以避免导通相刚导通时电流峰值过大的问题,在抑制SRM 转矩脉动的同时提高了效率。
