静力水准自动化监测系统在西安地铁地裂缝设防段的监测应用研究
2022-05-11高小宁
高小宁,马 瀛
(1.中煤西安设计工程有限责任公司,陕西西安 710054;2.西安市轨道交通集团有限公司,陕西西安 710021)
1 引 言
西安地裂缝破坏的主因是地裂缝两侧存在相对沉降差,因此,西安地铁修建过程中,在隧道穿越地裂缝区域设置了地裂缝设防段。目前,西安地铁地裂缝设防段自动化监测通常以全站仪自动化监测系统为主,其费用成本较高,监测点距离较远时三角高程单向测量结果稳定性较差。基于此,本文以静力水准自动化监测系统为主要研究对象[1],并对比全站仪自动测量系统高程测量结果和人工二等水准测量结果,多方面评价静力水准自动化监测系统。
2 静力水准自动化监测系统
2.1 静力水准自动化监测系统构成
静力水准自动化监测系统主要构成部分包括数据采集模块、数据通信模块、数据处理和分析模块三大部分[2]。
数据采集模块核心选用RTDT-221型压力式水准传感器,通过一根透明的PU管串联多个传感器,最后连接到一个储液罐上。相比于管线的容量,储液罐拥有足够大的容量,能够有效减少由于温度变化所带来的影响。
数据通信模块采用无线4G通信技术,将传感器监测数据实时发送至监测系统平台,进行数据处理。通过短信、邮件等形式,根据监测数据结果和前期预设报警值自动播报监测信息至指定接收人。
2.2 静力水准自动化监测系统工作原理
静力水准测量采用图1所示的连通器原理,即连通的容器中,液体总是寻求相同势能的水平原理,测量监测点间垂直高度的差异和变化量。为消除大气压的影响,所有的传感器共用一根通气管,最后连接到储液罐,形成一个封闭的气压自平衡系统。

图1 静力水准测量原理示意图Fig.1 Schematic diagram of static leveling principle

2.3 静力水准自动监测系统安装
静力水准主要安装步骤如下:首先,用水准仪标定储液罐和传感器位置,确保传感器位置高差小于其量程;其次,安装传感器和储液罐,拼接连通管,检查系统连通性,并灌液和调平设备;最后,打开通气阀连通通信及供电设备,进行监测系统调试。
静力水准自动监测系统安装注意事项如下:
1)基准点须安装在变形影响区域以外,根据《西安地裂缝场地勘察与工程设计规程》[3],地裂缝影响区范围为上盘0~20 m,下盘0~12 m,本试验将基准点安装在地裂缝下盘60 m处的隧道侧墙上。
2)本试验所采用的RTDT-221型压力式水准传感器量程为1 000 mm,因此,在传感器位置标定时应选用水准仪量测初步标定点位置,上下调整安装点,使传感器处于同一水平面上。西安地区安装时,应在系统液中加入一定量的防冻液和0.1%的硫酸铜溶液,防止冬季隧道内外循环通风时冰冻和夏季液体连通管内滋生水藻。
3 项目试验
本次项目试验位于西安地铁某号线某地裂缝设防段,在已有全站仪自动监测系统基础上增设静力水准自动化监测系统。本试验共布设13处型号为RTDT-221的压力式静力水准传感器(量程0~1 000 mm,最小读数0.1 mm)。
3.1 静力水准监测数据内符合精度分析
本试验共布设13个监测静力水准传感器,编号为1~13,距离基准点由远及近分布,如图2所示。

图2 静力水准传感器布设示意图Fig.2 Schematic diagram of static leveling sensor layout
3.1.1 停车时监测数据分析
统计分析停车时间段(1:00—4:50)的监测数据,传感器读数频率为5分钟/次,每个传感器在同一时间段共读数45次。选取4号、10号、13号静力水准传感器监测数据,绘制曲线图(见图3),数据曲线平稳波动,无明显发展趋势,波动范围为±0.04 mm。
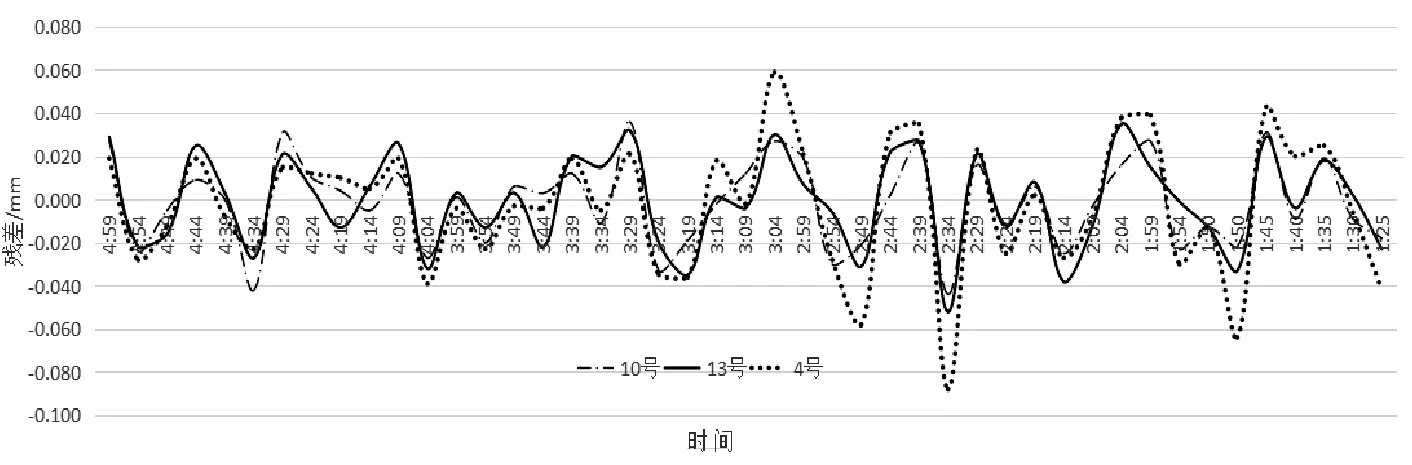
图3 停车后4号、10号、13号传感器监测数据曲线Fig.3 No.4,No.10 and No.13 sensors monitoring data curves after parking

表1 停车后静力水准传感器测量误差统计Tab.1 Thestaticlevelsensormeasurementerrorafterparking1号2号3号4号5号6号7号8号9号10号11号12号13号测量中误差/mm0.0350.0330.0310.0290.0260.0270.0270.0220.0280.0250.0230.0180.015
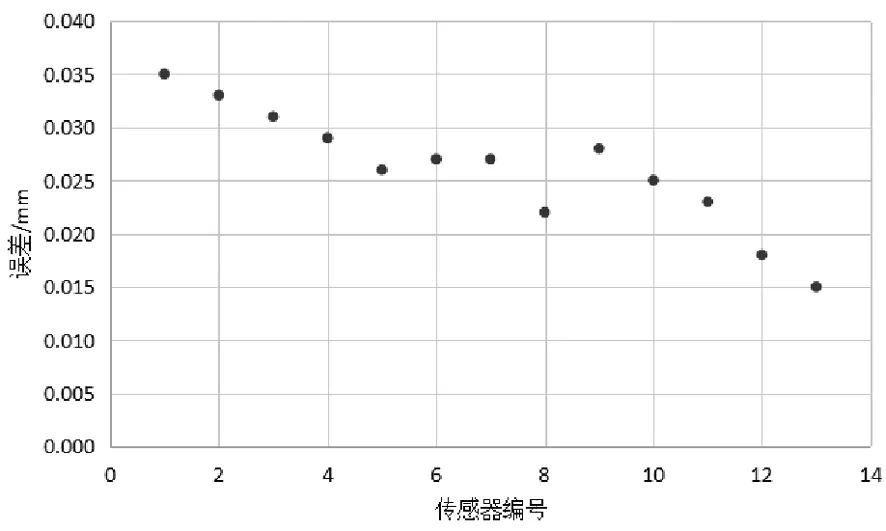
图4 停车后静力水准传感器测量误差分布Fig.4 The measurement error distribution of static leveling sensor after parking
3.1.2 行车时监测数据分析
统计分析行车时间段(9:00—23:50)的监测数据,传感器读数频率为20分钟/次,每个传感器在同一时间段共读数45次。根据同一时间段内13个传感器的监测数据计算测量中误差(含粗差和剔除粗差两项,见表2),并绘制曲线图(见图5)。粗差判定原则为短时间内出现数据跳跃大于1 mm,且下一监测周期内快速反弹。
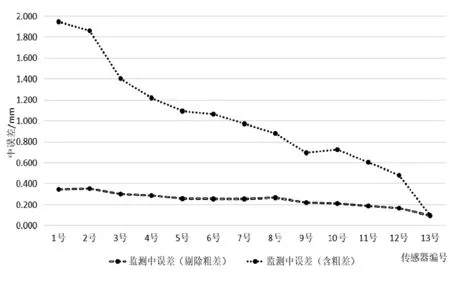
图5 行车时传感器监测数据曲线Fig.5 Traffic sensor monitoring data curve when driving
选取6号静力水准传感器监测数据,绘制数据分布图(见图6),在行车时间段残差值整体较停车时间段离散。
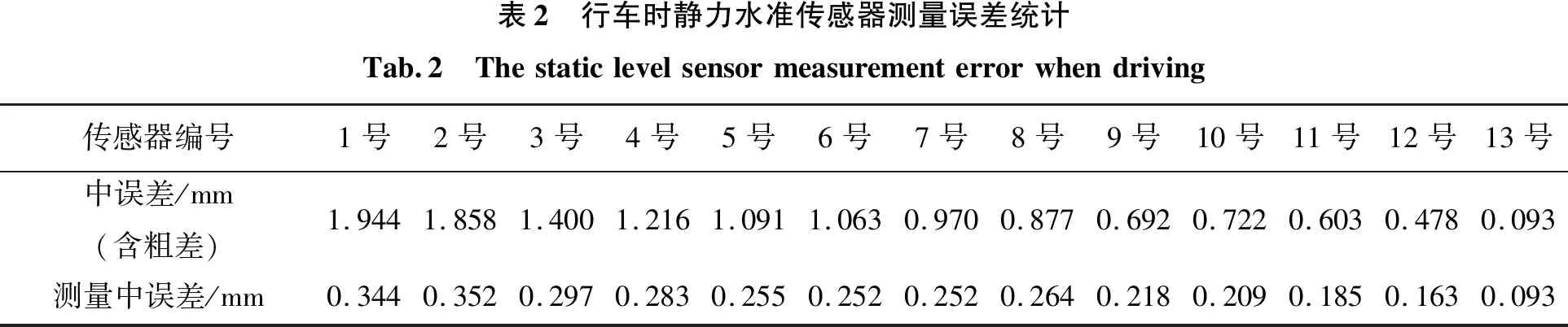
表2 行车时静力水准传感器测量误差统计Tab.2 Thestaticlevelsensormeasurementerrorwhendriving传感器编号1号2号3号4号5号6号7号8号9号10号11号12号13号中误差/mm(含粗差)1.9441.8581.4001.2161.0911.0630.9700.8770.6920.7220.6030.4780.093测量中误差/mm0.3440.3520.2970.2830.2550.2520.2520.2640.2180.2090.1850.1630.093
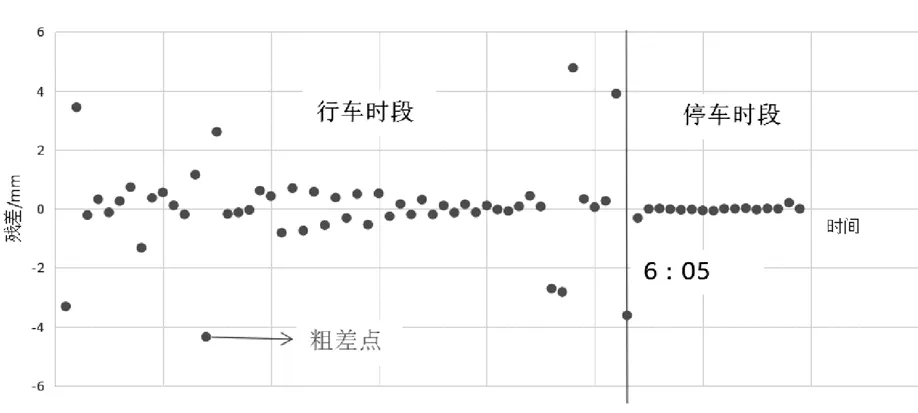
图6 行车时 6号传感器监测数据分布Fig.6 No.6 sensor monitoring data distribution when driving
根据监测数据统计分析得到如下结论:第一,传感器测量误差大小分布特点与距离基准点高度相关,距离越远误差越大;第二,原始监测数据统计结果显示粗差点通常位于7:30、21:05、23:45这3个时间点附近,是由数据采集时受列车振动所致;第三,剔除粗差后的行车时测量数据中误差显著高于停车时中误差。综上所述,压力式静力水准传感器测量精度受列车振动影响显著。
3.1.3 传感器测量精度随时间的损失情况分析
选择2019年9月3日至2020年11月3日时间段内,位于监测区域中间的6号传感器每月第3天的数据进行测量中误差计算(剔除粗差的监测数据)和数据分析(见图7),结果表明,中误差在0.1~0.4 mm区间波动,监测期内传感器测量数据符合性良好。
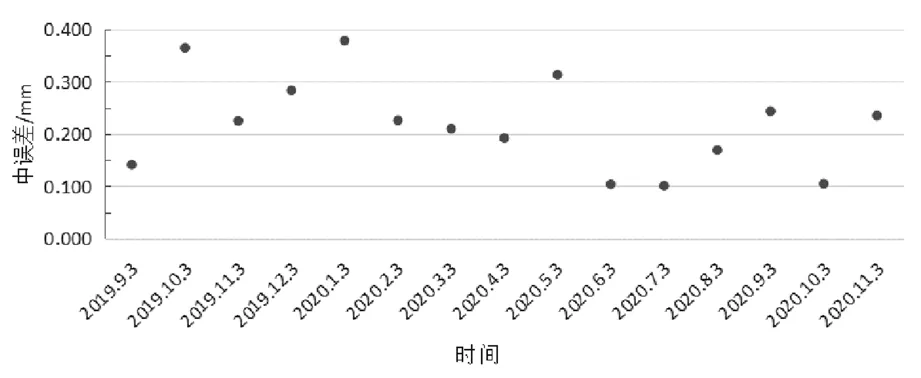
图7 全天候6号传感器各时间段测量误差分布Fig.7 The measurement error distribution of the all time of No.6 sensor in each time period
3.2 静力水准传感器与全站仪三角高程、人工二等水准监测数据对比
本次试验对比2019年11月2日至2020年11月3日时间段内全站仪三角高程、人工二等水准数据和静力水准传感器测量数据的累计变形值(见表3),绘制变形值曲线(见图8)。利用现有成熟的测量成果验证相同环境下静力水准传感器监测结果的可靠性。
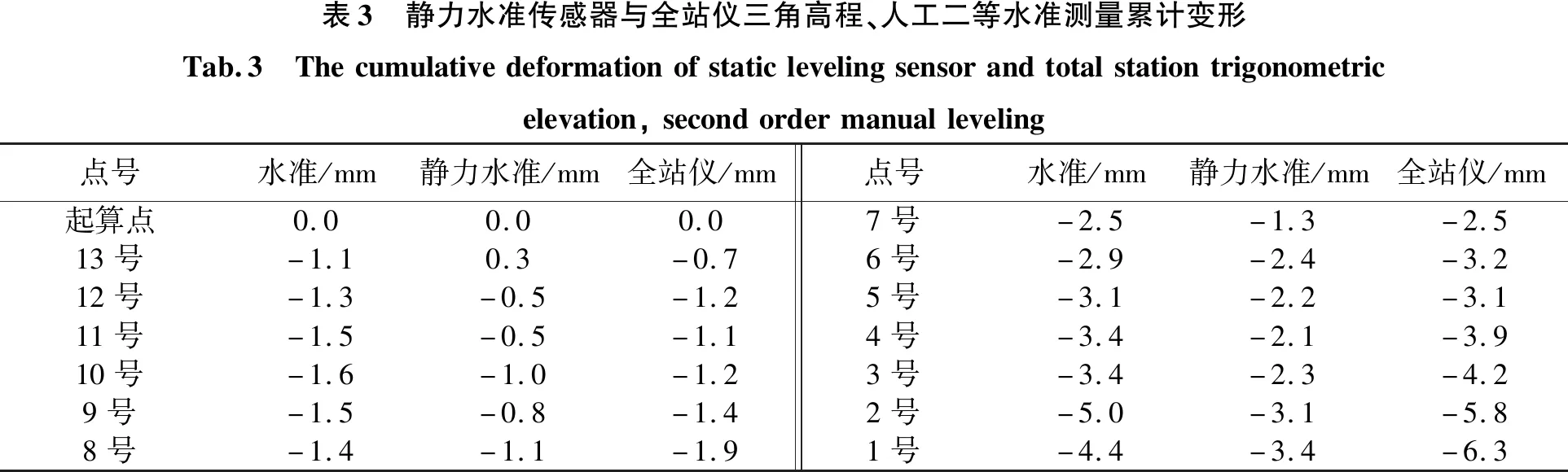
表3 静力水准传感器与全站仪三角高程、人工二等水准测量累计变形Tab.3 Thecumulativedeformationofstaticlevelingsensorandtotalstationtrigonometricelevation,secondordermanualleveling点号水准/mm静力水准/mm全站仪/mm点号水准/mm静力水准/mm全站仪/mm起算点0.00.00.07号-2.5-1.3-2.513号-1.10.3-0.76号-2.9-2.4-3.212号-1.3-0.5-1.25号-3.1-2.2-3.111号-1.5-0.5-1.14号-3.4-2.1-3.910号-1.6-1.0-1.23号-3.4-2.3-4.29号-1.5-0.8-1.42号-5.0-3.1-5.88号-1.4-1.1-1.91号-4.4-3.4-6.3
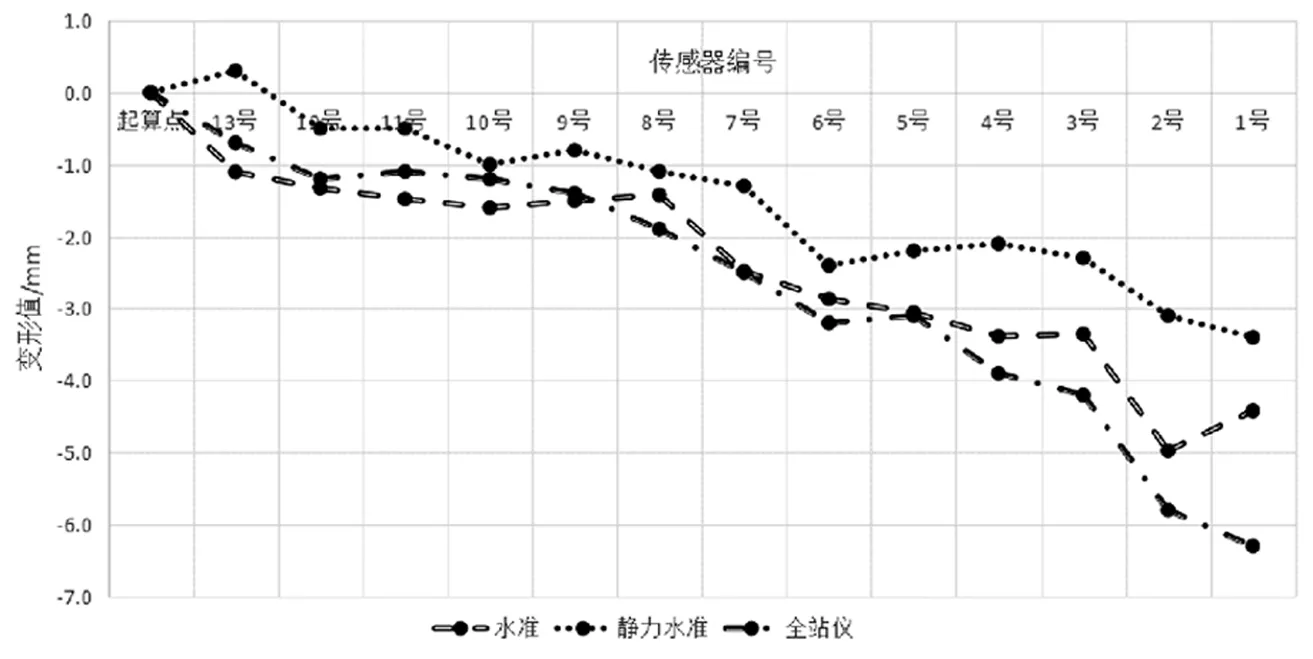
图8 静力水准传感器与全站仪三角高程、人工二等水准测量累计变形曲线Fig.8 Static leveling sensor and total station tigonometric elevation,manual leveling second class cumulative deformation curves
监测结果表明,7号至13号传感器监测数据与人工二等水准测量数据符合性优于1 mm,1号至6号传感器监测数据相对偏差较大,2号点差值最大为1.9 mm。全站仪监测数据在远离基准点位置偏差较大的原因是全站仪测量系统起算基准点位于监测区域两端,与水准测量系统有差异。
4 结束语
1)静力水准自动化监测系统传感器数据采集精度受行车振动影响显著,但具有测量内符合精度高、测量频率高的特点,其测量精度和可靠性均可以满足西安地铁地裂缝设防段自动化监测工作需求。此外,静力水准自动化监测系统具有成本优势和最高2分钟/次的高频读数优势,较适用于穿越工程影响区建/构筑物沉降变形监测,配合动态施工管理。
2)静力水准测量方法的测量误差与距离基准点长度正相关,不同的监测项目应根据需求选择合理的测线长度,可通过分段设置测线或在测线两端设置基准点的方式进行成果校正。
3)压力式静力水准传感器监测系统因采用相对密封的内循环空间,储液损失量极少,拉长了维保周期,同时在漫长的监测周期内,数据采集内符合精度无明显损失。该数据与人工二等水准测量数据有一定差值,可能是由于压力式传感器计算模型存在不足。
4)本次试验存在以下不足:第一,研究环境较为单一,缺少温差、日照方面的影响研究;第二,研究面较狭窄,缺乏多条测线基准传递问题和外界碰撞干扰问题的研究。以上不足需要结合后期工作,继续探索总结。
