低空无人机大比例尺测图精度分析
2022-05-11卢伟
卢 伟
(广东省地质局第六地质大队,广东江门 529000)
1 引 言
当前,无人机低空摄影测量系统已在全国范围内大力推广。无人机低空摄影测量在应急测绘保障、新农村建设用地测绘、复杂困难地区测绘、国土资源利用监测等应用方面具有特殊优势,且取得了良好的社会和经济效益[1]。相关科研单位建立了完善的无人机航测服务体系,能够提供数据处理软硬件设施、技术培训、售后服务等一整套服务,解决了生产单位的后顾之忧[2]。在像片解算方面,国内普遍采用的是经过检校的非量测型数码像机,其利用GPS/IMU定位导航系统定点曝光,通过POS辅助空三解算像片的外方位元素。而目前无人机搭载的五镜头像机,一次飞行能够获取5个方向的照片数据,可通过建模来实现三维方向立体成图[3-5]。
本文结合实际工程项目,阐述了光束法区域网平差的整体流程,对无人机低空摄影测量影像进行内业处理,实现了无人机低空摄影测量成图全流程,并且对像控点精度、地物地貌精度进行验证。精度验证结果表明,低空无人机摄影测量技术能满足大比例尺地形图测绘的精度要求。
2 低空无人机系统组成
无人机遥感系统一般由飞行平台、飞行控制系统、地面监控系统、任务设备、数据传输系统、发射与回收系统及地面保障装备等7部分组成。
飞行平台就是无人机本身,是搭载导航设备、数码像机等仪器的载体。为了满足航空摄影测量任务的需要,无人机的载荷一般要大于2 kg,飞行速度一般要达到60~160 km/h,飞行时间不低于2 h,并且能够抵御4级风的影响[6]。
飞行控制系统是飞机上导航、定位和自主飞行控制的设备,飞行控制系统的重量应小于2 kg。机载飞行控制系统主要包括飞控板、惯性导航系统、GNSS接收机、气压传感器、空速传感器、转速传感器等部件。系统除具备GNSS/INS惯性导航功能外,为适应摄影测量的需要,飞行姿态控制横滚角、俯仰角、航向角误差均应小于±3°,航迹控制精度中偏航距、航高均差应小于±20 m,直线段航迹弯曲度应小于±5°[7]。由于无人机平台普遍配备GNSS惯性导航系统,POS辅助空中摄影测量在无人机低空摄影测量中得到了广泛应用。
地面监控系统主要由无线电遥控器、RC接收机、监控计算机以及配套的相关软件等组成。虽然无人机可以在自动驾驶仪的控制线进行自动作业,但时常会出现发动机故障、飞机失速等问题,需要地面监控系统时刻监控无人机的飞行状态[8]。
任务设备是无人机进行航测作业系统所使用的数码像机以及其控制系统等相关的附设装置,主要用于获取和存储航空影像。数码像机应具备电子快门,且快门速度要快于1/1 000 s。数码像机的控制系统要具备等时差、等间距、定点曝光控制功能,并能记录数码像机曝光时刻像机投影中心的位置以及姿态信息[9]。数码像机控制系统可以单独配置,也可与飞行控制系统集成。
数据传输系统由机载部分和地面部分组成,用于地面监控系统与无人机之间的通信。在空地之间没有遮挡的情况下,通信有效距离需大于10 km。发射系统负责通过滑跑或者弹射的方式放飞无人机。采用滑跑起飞方式 ,一般要求在60~100 m距离内达到起飞速度并升空。在回收方面,如果条件允许,无人机可采用滑行回收系统。如果场地不允许,无人机可采用弹射起飞、伞降回收的方式作业。
地面保障设备包括运输保障设备和航摄作业保障设备。运输保障设备是指用于无人机航摄系统设备和部件运输保障的包装运输箱,系统主要设备和易损部件应配备专用包装运输箱。航摄作业保障设备主要是指野外装备,这是保障无人机航摄工作正常开展所需的设备器材,其种类和数量根据实际需求确定。
3 解析法空中三角测量
3.1 基本流程
目前投入使用的无人机航测系统基本上都搭载了POS系统,虽然获取的POS数据不能用于POS辅助空中三角测量,但获得的粗略POS信息可以用来识别航带,用作相对定向循环解算的初始值,这样可以加快收敛。收集现有的地形图和布设地面控制点作为控制依据和最后精度评价的检验点。由于无人机上搭载的是普通数码像机,而不是专业的量测像机,内部畸变非常大,所以在相对定向前要进行像机标定。像机标定是非常重要的步骤,关系到后面匹配的精度,进而影响空三解算的结果。无人机低空摄影测量系统解析空中三角测量的具体流程如图1所示。
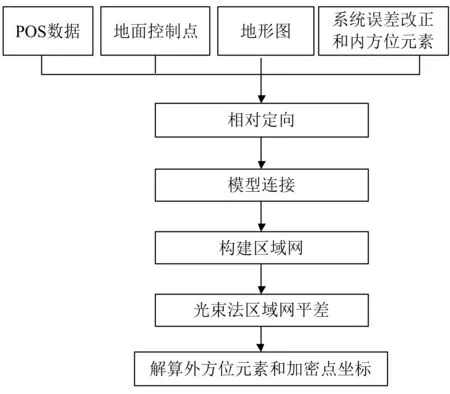
图1 解析空中三角测量流程Fig.1 Process of analytical photogrammetric aerial triangulation
3.2 解析空中三角测量原理
解析空中三角测量是指用计算的方法,根据遥感像片上量测的像点坐标和少量地面控制点,采用较严密的数学公式,依据最小二乘法原理,用计算机解算待定点的平面坐标和高程。解析空中三角测量目前常用的方法是区域网平差。区域网平差是指在由多条航线连接成的区域内进行控制点加密,并对加密点的平面坐标和高程进行整体平差。将构网的方法和平差单元作为划分依据,区域网平差的基本方法包括航带法、独立模型法和光束法[10]。
在上述三种方法中,航带法所求解的未知数少,计算方便快速,但是不如光束法和独立模型法严密,因此主要用于为光束法提供初始值和低精度的坐标加密;独立模型法理论较严密,精度较高,未知数、计算量和计算速度介于光束法和航带法之间;光束法理论最为严密,加密成果的精度较高,但需要解求的未知数多,计算量大,计算速度较慢。当前高精度空中三角测量加密普遍采用光束法区域网平差。由于本次数据处理采用的是光束法区域网平差,故对此方法进行着重介绍。
3.3 光束法区域网平差
光束法区域网平差以一张像片组成的一束光线作为平差的基本单元,以中心投影的共线方程作为平差的数学模型,以相邻像片公共交会点坐标相等、控制点的内业坐标与已知的外业坐标相等为条件,列出控制点和加密点的误差方程式,进行全区域统一平差计算,解求出每张像片的外方位元素和加密点的地面坐标。
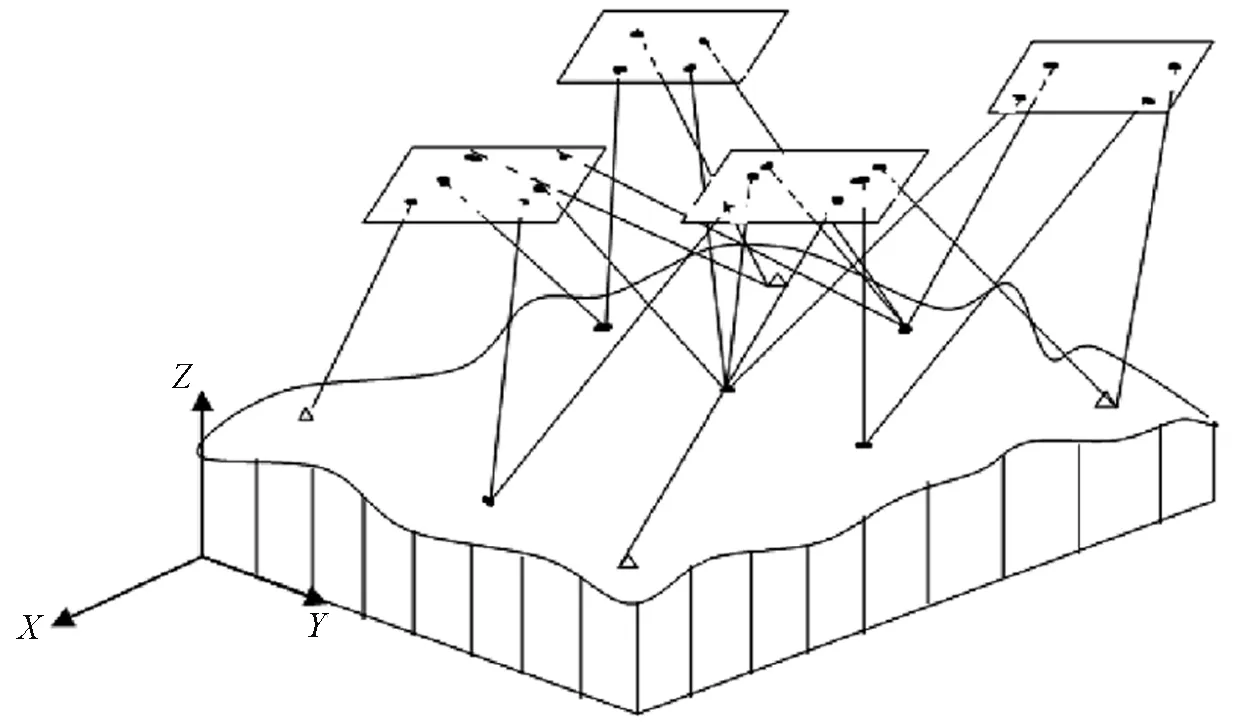
图2 光束法区域网平差示意图Fig.2 Diagram of area adjustment with bundle method
光束法区域网平差的主要步骤如下:
1)确定像片外方位元素和地面点坐标近似值。
如果初始值不能确定,可以采用地形图获取,也可采用交替进行后方交会和前方交会建立航带模型,但通常采用航带法加密成果作为光束法区域网平差的初值。
2)逐点建立误差方程式和改化法方程式。
3)利用边法化边消元循环分块法解求改化法方程式。
4)求出每张像片的外方位元素。
5)根据空间前方交会求得待定点的地面坐标,取像片公共连接点的均值作为最后成果。
光束法区域网平差以像点坐标作为观测值,理论严密,但对原始数据的系统误差十分敏感,只有预先消除像点坐标的系统误差后,才能得到理想的加密成果。因此,为降低影像上的系统误差,必须消除影像畸变差的影响。在获得每张像片的外方位元素和加密点地面坐标的近似值后,利用共线条件方程式列出每张像片上控制点和加密点的误差方程式。求得每张像片的外方位元素后,可利用双像空间前方交会或多像空间前方交会法解求全部加密点的地面坐标。其中,多像空间前方交会法是根据共线方程,由待定点在不同像片上的所有像点列误差方程式进行解算。
4 工程实例与精度分析
4.1 项目基本情况
该测区位于某地,测区内平原地区约占33%,丘陵地区约占38%,其余为山地地区。测区北部多为林地,中部地区为草地,南部地区为沙漠地,测区内有条宽约240 m的河流流过。该测区1∶2 000高分辨率数据生产项目主要是利用无人机低空摄影技术进行航测作业,获取测区11.49 km2内优于0.2 m地面分辨率的数码影像后,在布设地面控制点的基础上,利用DPGrid软件进行自动空三加密,随后利用Virtuozo软件进行航测数据的内业采集并最终生成测区范围内1∶2 000比例尺的数字线划图(DLG),具体技术流程如图3所示。
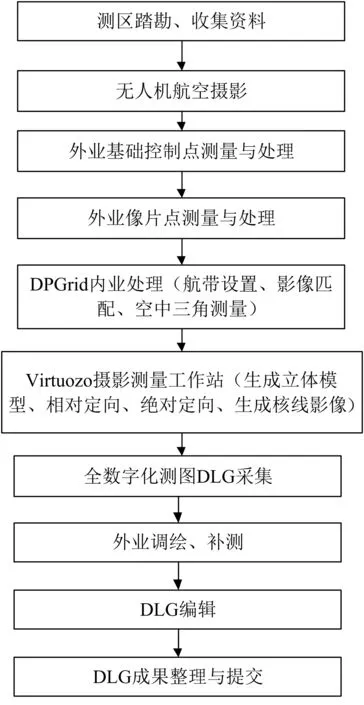
图3 1∶2 000 DLG生产技术流程Fig.3 1∶ 2 000 DLG production flow chart of the surveying area
1)航带设置
本测区航摄飞行预定的飞行航带设置如图4所示。航向重叠度一般设置为60%~65%,旁向重叠度设置为30%~40%。当测区建筑较密集时,可适当增大航向重叠度与旁向重叠度,以减弱因航向重叠度不足而造成的建筑物几何结构粘连。
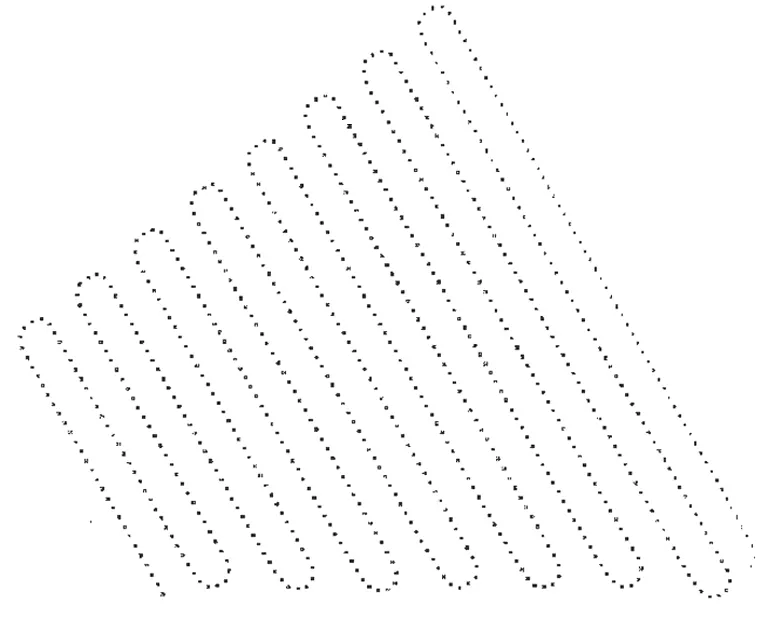
图4 航带设置Fig.4 Chart of flight belt setting
2)地面像控点的布设
本测区共布设173个外业像控点,有效点位141个。其中选取125个点作为地面控制点,16个点作为检核点。像控点的点位分布如图5所示,其中黑色为地面控制点,红色为检核点,162号点的数字刺点如图6所示。
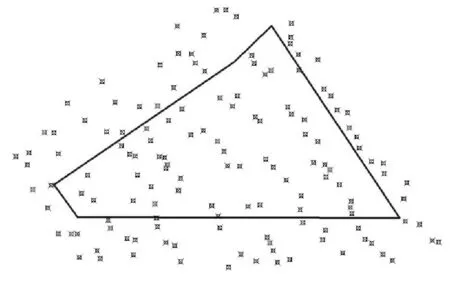
图5 外业像控点分布Fig.5 Distribution of field image control points

图6 刺点图示例Fig.6 Example of prick chart
4.2 空三加密结果精度评定
4.2.1 总体结果
本次项目共布设像控点173个,其中个别点位判读困难,为保证精度进行了剔除,实际利用像控点为141个。其中,用作地面控制点125个,检核点16个。按步骤及要求处理各项数据后,得到地面控制点与检核点平差的残差值。
在125个地面控制点中,有2个控制点的高程误差过大不能使用。最终使用123个点进行平差计算,得到平差残差的统计结果如表1所示。

表1 点平差的计算结果Tab.1 Adjustmentresultsoftheparticipatingpoints方向中误差/m最小中误差/m最大中误差/mX0.23380.04440.8158Y0.24440.00270.7724XY0.33820.28830.8815Z0.32560.00790.8408
剔除2个高程出现粗差的控制点后,利用123个平面坐标值和123个高程值进行平差计算,得到平差残差的统计结果如表2所示。16个检核点平差的结果如表3所示。
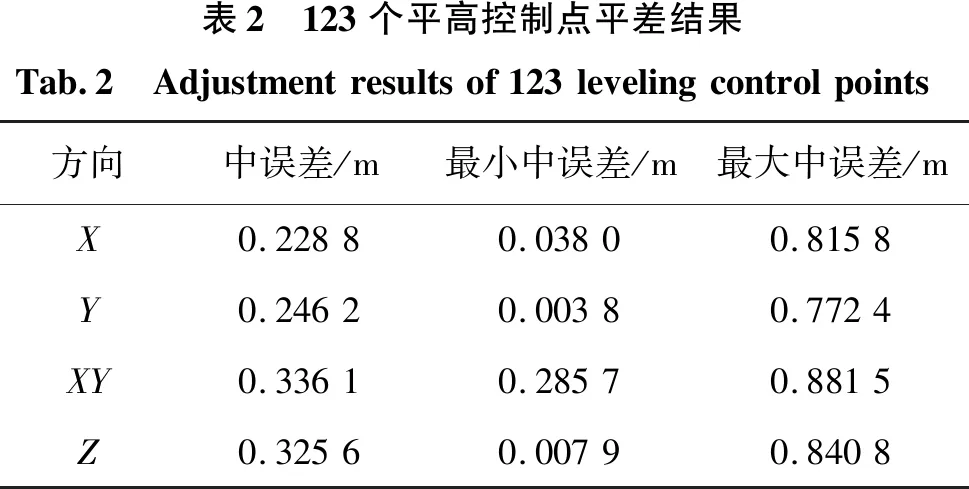
表2 123个平高控制点平差结果Tab.2 Adjustmentresultsof123levelingcontrolpoints方向中误差/m最小中误差/m最大中误差/mX0.22880.03800.8158Y0.24620.00380.7724XY0.33610.28570.8815Z0.32560.00790.8408
结合控制点残差、检查点误差最大限值的规定,从表3可以看出,地面控制点和检查点的各项平差结果均满足相应要求中的最高精度要求,即对于平地区域的要求。由此可见,无人机低空摄影测量的航测数据在处理后进行空三加密,其精度可以满足1∶2 000地形图测绘的要求。
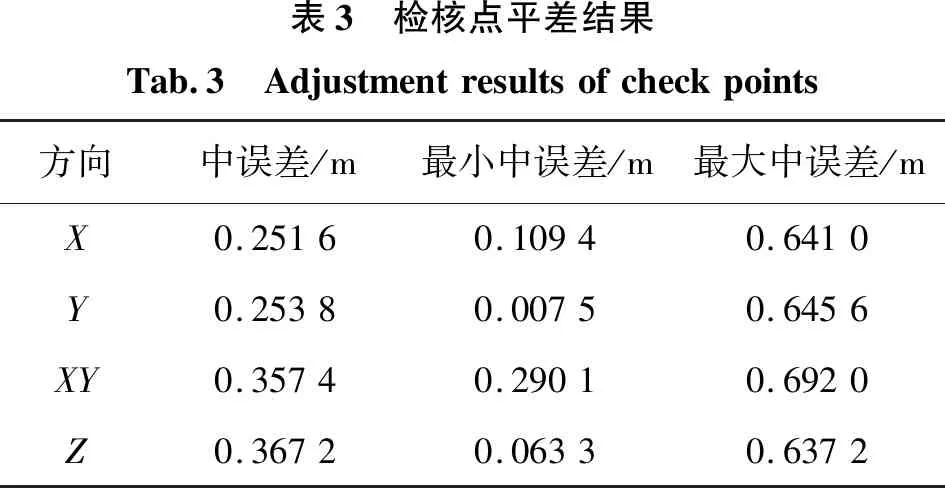
表3 检核点平差结果Tab.3 Adjustmentresultsofcheckpoints方向中误差/m最小中误差/m最大中误差/mX0.25160.10940.6410Y0.25380.00750.6456XY0.35740.29010.6920Z0.36720.06330.6372
4.2.2 地形、地物对控制点精度的影响分析
通过对不同地形特征、不同地物覆盖的控制点平差进行精度分析可知,不同的地形特征、地物对控制点的精度均存在一定的影响。
4.2.2.1 不同地形对像控点精度的影响
平地点数为41、丘陵点数为47、山地地区点数为35,得到空三加密不同地形地面控制点中误差和最大误差统计,如表4所示。

表4 空三加密不同地形地面控制点中误差和最大误差Tab.4 Themeansquareerrorandthemaximumerrorofthedensificationfordifferentterraincontrolpoints中误差DX/mDY/mDXY/mDZ/m最大误差DX/mDY/mDXY/mDZ/m平地0.14460.17290.22540.32480.30130.48560.49460.7281丘陵0.23310.23350.32990.36480.62240.72700.75441.9375山地0.31690.34820.47090.45350.81580.77240.88150.8408
通过对比不同区域控制点空三加密的中误差可以看出,地形对控制点的精度存在一定的影响,布设在平地、丘陵、山地地区的控制点精度依次降低。另外,其影响不仅体现在整体的中误差方面,也体现在最大中误差方面。除丘陵地区的67号点出现粗差外,布设在平地、丘陵、山地地区的控制点量测所出现的最大误差依次增大,导致这类现象的原因主要有以下两点:
一是在布设像控点过程中,采用RTK方式量测其坐标,由于像控点位置关系导致GNSS信号遮挡等原因造成了精度差异;
二是由于丘陵、山地区域像控点布设困难,其周围区域像控点布设较少且不均匀,导致该区域定位精度较低。
此外,除由于67号点导致丘陵地区最大高程误差出现粗差外,在丘陵、山地布设的控制点中存在较多点位误差偏大的点,对整体中误差的影响也较大。
这主要是因为丘陵与山地地区地表植被覆盖而导致的GNSS信号遮挡,同时导致这类地区植被判别出现差错。
4.2.2.2 不同地物对像控点精度的影响
在不同的地形与地貌条件下,分别采取像控点进行较差比较,结果如表5所示。
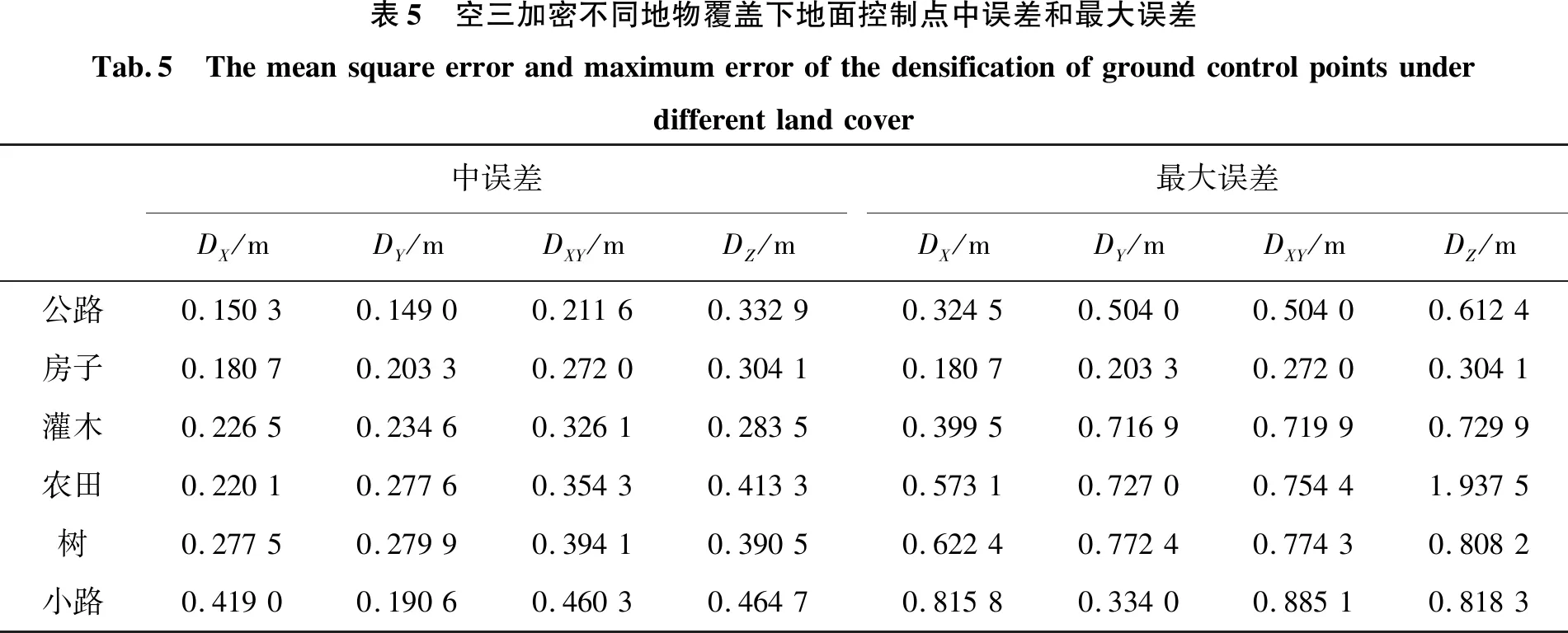
表5 空三加密不同地物覆盖下地面控制点中误差和最大误差Tab.5 Themeansquareerrorandmaximumerrorofthedensificationofgroundcontrolpointsunderdifferentlandcover中误差DX/mDY/mDXY/mDZ/m最大误差DX/mDY/mDXY/mDZ/m公路0.15030.14900.21160.33290.32450.50400.50400.6124房子0.18070.20330.27200.30410.18070.20330.27200.3041灌木0.22650.23460.32610.28350.39950.71690.71990.7299农田0.22010.27760.35430.41330.57310.72700.75441.9375树0.27750.27990.39410.39050.62240.77240.77430.8082小路0.41900.19060.46030.46470.81580.33400.88510.8183
地物对像控点精度的影响有两方面:一是不同的植被覆盖对GNSS信号的遮挡导致部分地区点位测量出现偏差;二是不同特征点的地物在航空影像上刺点位置的判读出现偏差。布设在公路上的控制点由于在刺点图、航空影像上判读精准,其精度较高。布设在小路等的控制点,由于条件限制,精度较低。
5 结束语
本文通过对无人机低空摄影测量系统的分析以及无人机航测数据的处理分析,得到以下结论:
1)结合POS数据通过光束网区域平差,得到的空三加密成果满足项目所需的1∶2 000地形图测绘的要求。说明低空无人机摄影测量可应用于测绘大比例尺地形图,为测绘大比例尺地形图提供参考借鉴。
2)地面控制点的选取对空三加密的精度影响较大,控制点布设区域的地形、植被覆盖以及控制点所处的位置都对控制点的精度有直接影响,因此在选择控制点过程中应充分考虑上述因素。
