倾斜摄影测量的隧道断面变形监测方法研究
2022-05-11张永虎
张永虎
(青海省自然资源遥感中心,青海西宁 810001)
1 引 言
隧道建设和运营器件,受地质条件、施工技术、气候条件以及车辆行驶振动等因素的影响。一般来讲,隧道施工和运营过程中,在规定范围内允许一定的变形情况,但若隧道建筑的变形量超出设计变形限度,就会影响隧道建筑的正常使用,严重的还会危及安全。因此隧道建筑在施工和运营过程中,必须对其进行监测来了解具体的变形情况、变形趋势以及变形与引起变形因素之间的关系,从而对隧道建筑进行调整与修护,进而保证隧道建筑的运营安全[1]。
通常,隧道的变形情况选择隧道断面作为监测界面,隧道变形是直接表示隧道稳定状态的宏观物理量,是隧道与周围环境等各种因素综合作用的结果,断面变形信息是隧道工程稳定性的真实反映。
通常选择隧道断面作为监测界面,通过采集不同观测时期的隧道点位信息并进行位移量的对比分析,以反映隧道局部或某一区段内的收敛变形情况。目前国外隧道断面监测的研究方法主要采用最小二乘法来确定模型参数,构建位移方程,分析变形资料,监控隧道断面的运行。随着监测设备的升级、测量精度的提高[2],国内隧道断面变形监测方面得出的研究成果包括基于MDP算法的隧道断面变形监测、基于全站仪的变形监测等多种方法,但监测方法仍存在精度较低、误差较大的问题。
基于此,将倾斜摄影测量技术应用到隧道断面变形监测中,利用倾斜摄影测量技术测量隧道断面位置信息,将测量获得的数据通过拼接构建隧道断面三维模型,在此基础上分析隧道断面变形阶段与影响因素,实现隧道断面的变形监测。通过试验证明,倾斜摄影测量的隧道断面变形监测方法的精准性更高,有较高的实用性。
2 隧道断面变形监测方法设计
隧道断面变形监测主要是监测断面的沉降和水平位移,因此将监测隧道的变形划分成垂直和水平两个方向上的变形位移变化[3]。利用倾斜摄影测量技术,通过无人机飞行器采集隧道断面的初始信息,以机载像机的位移点作为监测点,计算对应隧道断面上的各个像素点坐标,对各监测点的位移矢量进行分析,判断隧道断面上的像素点是否存在位移变化,并得出位移的大小和方向。最终结合倾斜摄影测量数据结果,输出隧道断面上各个监测点的垂直沉降和水平位移,即为隧道断面变形的监测结果。
2.1 隧道断面位置信息测量
采用倾斜摄影测量技术,利用无人机设备,测量隧道断面的相关数据。无人机倾斜摄影测量主要是利用摄像设备的主光轴明显偏离铅垂线或水平方向,并按照一定的倾斜角度进行摄影的技术,在无人机设备上安装多台高分辨率拍摄装置,设置一定的角度将其安装在无人机稳定平台上[4]。倾斜摄影测量的理论基础是共线方程理论,将实时采集的倾斜图像与实际地物坐标联系在一起,并创建对应的变换关系。
隧道断面的图像空间和实际空间的统一坐标如图1所示。

图1 倾斜摄影测量共线条件坐标系Fig.1 Collinear coordinate system of inclined photogrammetry
图1中,S为倾斜摄影的拍摄中心,对应的坐标为(XS,YS,ZS),A为拍摄环境中隧道断面上的任意一点,为A在倾斜摄影图像中对应的位置构像[5]。x、y、z为倾斜摄影图像空间辅助坐标,X、Y、Z为隧道断面的实际空间坐标,由于在倾斜摄影过程中S、A和a处于相同的直线上,因此得出倾斜摄影测量图像与隧道断面实物之间的坐标关系为:
(1)
式中:f为倾斜摄影像机的焦距,ai、bi和ci分别为像片的角元素组成的9个方向的余弦[6]。倾斜摄影测量的图像数据通过地面近似水平时的中心投影构像方程,形成隧道断面和倾斜摄影图像上两个对应点之间的变换关系[7]。基于此,设置无人机飞行路线、摄影角度以及拍摄参数,得出对应的倾斜摄影测量图像,转换图像中的隧道断面坐标后得出隧道断面的实际位置测量结果。
2.2 构建隧道断面三维模型
通过多个单张隧道断面的倾斜影像的拼接和构建,实现对隧道断面的三维模型。通过对单张倾斜摄影影像中隧道高度、水平距离、面积等几何信息的量测,计算隧道断面的任一高度、水平距离、隧道顶部和侧面积[8]。通过内插计算出来的点是地面上几何信息计算的基础,结合图像坐标以及图像与实物的关系,得出隧道断面上任意两点之间的距离为:
(2)
式中:(X1,Y1,Z1)和(X2,Y2,Z2)分别为图像中隧道断面上的任意两点的坐标。假设已知倾斜摄影测量图像中的任意一个空间多面性的n个顶点坐标为K1(xk1,yk1),…,Kn(xkn,ykn),那么该部分的面积为:
(3)
结合选取像机中心和侧面中心的连线与侧面法向量之间的夹角,得出隧道断面的面积以及各点之间的距离。通过对倾斜摄影数据的处理,提取隧道断面中轴线[9]。综合点集的提取结果拟合出隧道断面投影在XOY面上的中轴线,将中轴线、断面点集等按照一定的结构拼接和组装,实现隧道断面三维模型的构建,如图2所示。
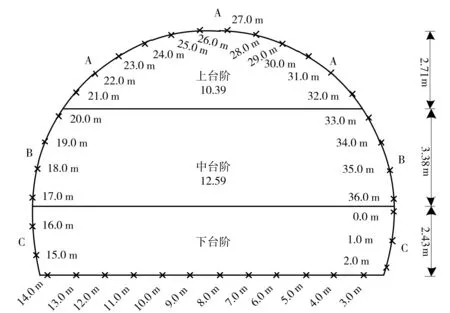
图2 隧道断面三维模型Fig.2 3D model of tunnel section
2.3 分析隧道断面变形阶段与影响因素
基于隧道断面三维模型,分析隧道断面变形的作用因素和演变阶段[10]。隧道断面的初始应力状态受到自身重力因素和构造性因素的影响[11]。通过对影响因素的分析,将隧道断面的变形分为急剧变形阶段、缓慢变形阶段以及基本稳定阶段3个阶段,在急剧变形阶段,隧道断面的初始变形速率最快,然后逐渐降低,隧道断面的变形量与时间之间的关系曲线呈下弯型[12]。缓慢变形阶段断面的实际变形量逐渐减小,而由于基本稳定阶段隧道断面的主要作用力为隧道断面的自身重力,因此在此阶段不存在明显的断面形变。
2.4 实现隧道断面的变形监测
在隧道断面变形监测中,首先收集不同阶段的倾斜摄影测量数据。一般来讲,未发生变形的隧道断面为平滑曲线,结合这一特点可以确定收集的测量数据中的初始断面信息,并以此作为对比标准,提取隧道变形信息,从而计算出当前隧道断面的变形量[13]。
结合拟合的中轴线,得出中轴线与各个坐标轴的夹角,将原坐标系下的坐标旋转到新坐标系下,得到新坐标系下的坐标值。经过转换的隧道断面中轴线和X轴是平行的,此时每一个X值和隧道断面是一一对应关系,将X值与断面的里程相对应,确定任意里程对应的隧道断面,提取隧道断面变形信息[14]。将提取出的隧道断面变形信息与初始隧道断面的坐标信息做比对,若对应坐标的值不相同,即可通过计算两点之间的距离得出该点的变形量,综合隧道断面中所有坐标点的变形量即为输出的监测结果[15]。在监测方法中设置隧道断面变形的临界值为η,若实时监测结果大于η,需要启动危险报警程序,并停止隧道的运营工作。
3 监测性能对比试验分析
以测试基于倾斜摄影测量的隧道断面变形监测方法的监测误差为实验目的,针对设计的监测方法设计性能对比试验。在试验中分别设置传统的变形监测方法和文献[7]提出的利用三维激光扫描技术结合MDP算法的隧道断面变形监测方法作为试验的对比方法。其中,传统的监测方法主要应用了全站仪或机器人等单点测量方法,在隧道内部中心位置上安装一个全局扫描装置,并通过对隧道内断面数据的扫描得出隧道的三维数据,并根据实时三维数据的采集结果,得出最终的监测结果。而文献[7]提出的变形监测方法主要应用了MDP算法,即动态最优规划算法,在实际的监测过程中主要结合当前的隧道断面三维数据进行动态最优规划和布局,观察当前结构是否为最优结构,若判断结果为否定,则证明该隧道断面存在变形情况。分别将上述三种监测方法应用到相同的隧道环境中,设置隧道的初始数据和变形数据,将三种监测方法的变形量监测结果与设置的变形数据做比对,得到关于监测误差的测试对比结果。
3.1 选择隧道断面试验环境
此次隧道断面试验的实现环境主要分为两个部分,一个是隧道环境,另一个是试验环境。此次选择的监测隧道对象为某高速公路隧道,隧道全长63.8 m,隧道的内部直径为8 m。配置监测方法的试验环境,在隧道周围5 km的范围内铺设局域网,并在局域网内安装主测计算机。在主测计算机中安装监测方法的实现开发软件,并将试验中的测试监测方法和两个对比监测方法以相同的编码形式导入主测计算机中,经过调试得出可以直接操作的隧道断面监测界面。
3.2 设置隧道断面变形数据
在隧道的断面结构上选择4个测点,分别表示为上、中1、中2和下,按照隧道断面与隧道一侧出口的里程对隧道断面进行编号划分。试验对象的多个断面变形设置情况如表1所示。
表1中,L为断面的水平距离,H为断面的垂直高度。将设置的隧道断面数据与隧道断面的初始数据做相减计算,确定试验中隧道断面的总变形量为36.44 m。
3.3 设置无人机倾斜摄影像机参数
由于设计的隧道断面变形监测方法中利用无人机及其机载像机设备实现倾斜摄影测量,因此设置无人机以及像机的参数如表2所示。相关参数设置完成后,进入航测准备阶段,开启数据采集程序,并输入倾斜摄影航线,一切准备就绪后控制无人机起飞拍摄,并传输实时摄影数据。
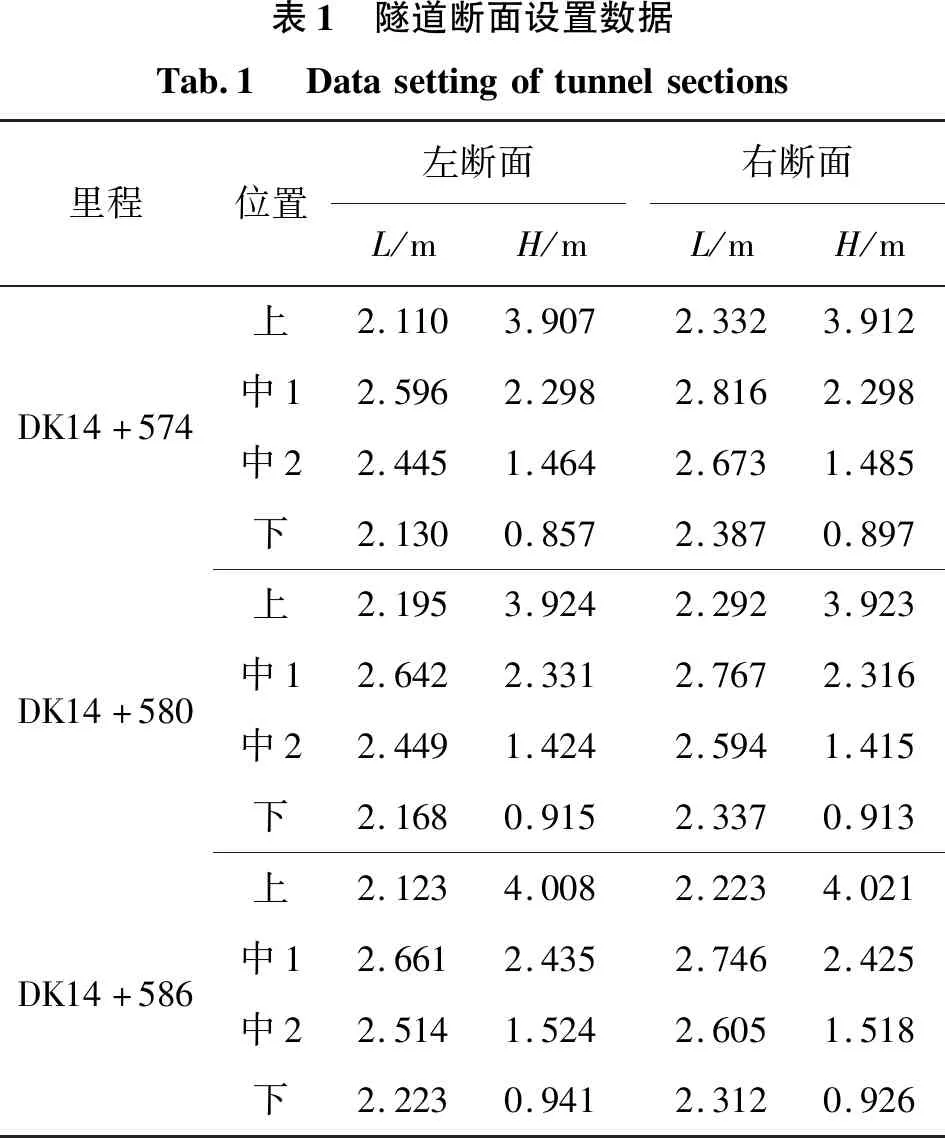
表1 隧道断面设置数据Tab.1 Datasettingoftunnelsections里程位置左断面L/mH/m右断面L/mH/mDK14+574上2.1103.9072.3323.912中12.5962.2982.8162.298中22.4451.4642.6731.485下2.1300.8572.3870.897DK14+580上2.1953.9242.2923.923中12.6422.3312.7672.316中22.4491.4242.5941.415下2.1680.9152.3370.913DK14+586上2.1234.0082.2234.021中12.6612.4352.7462.425中22.5141.5242.6051.518下2.2230.9412.3120.926

表2 倾斜摄影像机参数设置Tab.2 ParameterSettingofTiltCamera类型参数参数取值飞行器自重1280g最大上升速度5m/s最大下降速度3m/s最大水平飞行速度16m/s最大飞行高度6000m续航时间23min相机摄像传感器1/2.3英寸CMOS,1240万个有效像素镜头FOV94,20mm,光圈f/2.8电子快门速度8~1/8000s视频最大码流60Mbps视频格式MP4/MOV云台稳定系统3-轴(仰俯,横滚,偏航)可控转动范围俯仰:-90°~+30°最大控制转速俯仰:90(°)/s角度控制精度±0.01°
3.4 试验过程
在监测方法中输入隧道断面的初始数据,再利用各自的监测技术输出实时监测结果,其中设计监测方法输出的变形曲面如图3所示。将断面的变形监测结果与设置的变形数据相对比,分别计算隧道变形监测结果在水平和垂直两个方向上的误差,从而得出有关变形量监测误差的对比结果。
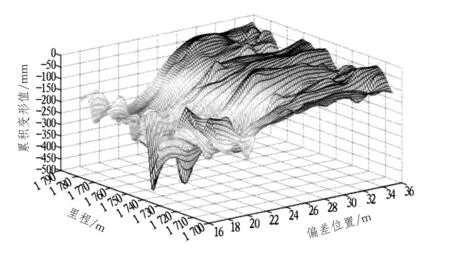
图3 隧道断面整体变形监测输出曲面图Fig.3 Overall deformation monitoring output surface of tunnel section
3.5 监测误差分析
在隧道断面变形监测结果中分别提取水平方向、垂直方向的监测数据,并与设置的变形数据做比对,得出水平方向、垂直方向监测误差的测试结果,水平方向和垂直方向的部分监测数据分别如表3、表4所示。
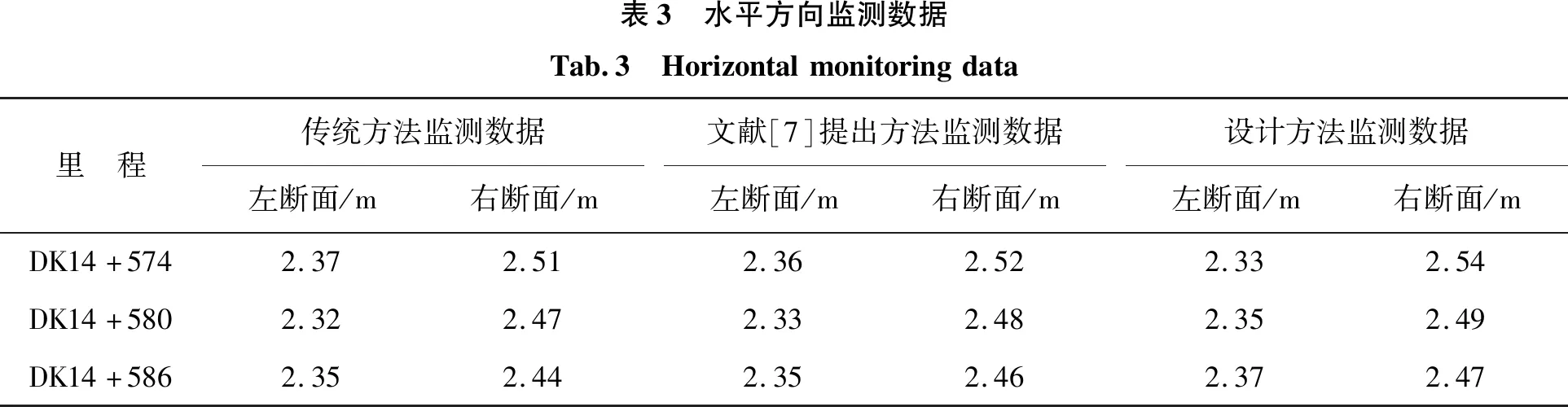
表3 水平方向监测数据Tab.3 Horizontalmonitoringdata里 程传统方法监测数据左断面/m右断面/m文献[7]提出方法监测数据左断面/m右断面/m设计方法监测数据左断面/m右断面/mDK14+5742.372.512.362.522.332.54DK14+5802.322.472.332.482.352.49DK14+5862.352.442.352.462.372.47
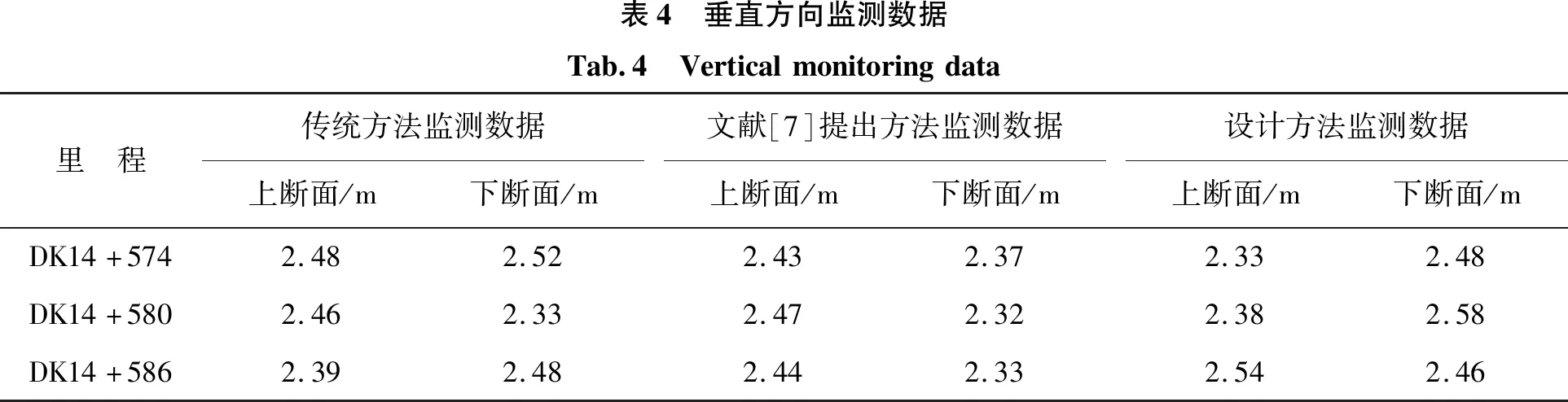
表4 垂直方向监测数据Tab.4 Verticalmonitoringdata里 程传统方法监测数据上断面/m下断面/m文献[7]提出方法监测数据上断面/m下断面/m设计方法监测数据上断面/m下断面/mDK14+5742.482.522.432.372.332.48DK14+5802.462.332.472.322.382.58DK14+5862.392.482.442.332.542.46
表3中的隧道断面监测数据为综合上、中1、中2和下4个水平方向数据的平均值,传统监测方法和文献[7]提出监测方法的监测误差分别为0.11 m和0.07 m,而设计监测方法的误差值为0.02 m,相比之下,基于倾斜摄影测量的隧道断面变形监测方法在水平方向上的监测误差更低。
由表4可知,传统监测方法和文献[7]提出监测方法的监测误差分别为0.08 m和0.06 m,而设计监测方法的误差值为0.03 m。综上所述,本文设计方法的监测误差显著低于传统监测方法和文献[7]监测方法的误差。
4 结束语
目前,隧道断面变形监测的方法可以分为接触式和非接触式两种类型。其中,接触式监测方法已经相当成熟,而非接触式方法正在研究发展阶段,也是当前研究的主要方向之一。在此次研究中以无人机的倾斜摄影测量技术为基础,设计了对隧道断面变形的监测方法,依托实际的隧道工程实例,对变形断面进行监测分析,最终得到了精度较高的监测结果。
