某航炮高吸能变刚度缓冲装置动力学特性研究
2022-05-09申亚琳
田 楠,李 勇,王 凯,申亚琳
(西北机电工程研究所, 陕西 咸阳 712099)
1 引言
后坐力是航炮装机的重要战术技术性能指标之一。为了适应现代化战场需求,要求航炮威力大、射击精度高的同时还必须后坐力小。航炮威力增大必然导致射击时后坐力增大,后坐力增大会增加飞机装载质量、影响飞机操纵性、降低航炮射击精度和射击稳定性。而通过合理设计缓冲装置可以有效减小航炮后坐力。传统的单刚度弹簧缓冲装置缓冲周期长,同时在抑制后坐阻力以及保持后坐力稳定性方面存在不足。
目前国内外对缓冲装置的研究较为深入。其中文献[6]阐述的是国外一种装在幻影Ⅲ飞机上与DEFA30毫米航炮配套的机械式高吸能缓冲装置,此种缓冲器采用了耗能大的摩擦装置及缓冲簧,而使后坐力有较大幅度的下降;文献[7]和文献[8]提出一种转管炮新型高效缓冲器,其采用具有高效缓冲性能的环形弹簧作为主要弹性元件,使用新型材料金属橡胶作为主要耗能阻尼材料,该装置具有较强的阻尼缓冲能力,可大幅度降低转管炮的后坐力,提高射击精度;文献[9]提出了一种刚度可变并带有阻尼的新型弹簧双向缓冲装置并对航炮后坐系统过程进行了动力学建模和仿真,并分析了刚度可变弹簧缓冲装置中的前置弹簧刚度、后置弹簧刚度、阻尼等对最大后坐力的影响规律;文献[10]以某小口径自动炮为研究对象,建立其刚柔耦合动力学模型,通过仿真对比不同射速和不同摩擦阻尼缓冲器参数时对自动炮后坐力影响。
上述工作主要围绕高吸能或变刚度弹簧开展研究,没有综合考虑高吸能和变刚度弹簧同时工作对航炮后坐力控制影响。本文以某航炮高吸能变刚度缓冲装置为例建立其动力学运动方程,以后坐力最小为目标和缓冲装置结构参数设计为约束条件对其进行优化设计,并搭建实物台架对高吸能变刚度缓冲装置抑制后坐力效果进行研究。
2 高吸能变刚度缓冲装置结构原理
环形弹簧在工作时由于其特殊的结构特性,接触表面产生很大的摩擦力,摩擦力会把较大部分后坐能量转换为热能释放到空气中耗散掉,因此其缓冲减震能力很高。液压缓冲装置与弹簧缓冲装置比较,能承受较大的载荷,吸收更多的能量,并将吸收航炮射击时的大部分后坐能量转化为热能散失到空气中。因此本文高吸能变刚度缓冲装置主要以液压和环形弹簧作为航炮缓冲装置耗能介质,以环形弹簧和矩形弹簧串联作为航炮缓冲装置储能介质。高吸能变刚度缓冲装置主要由液压筒、活塞杆、环形缓冲弹簧、矩形缓冲弹簧、单向活门、复位簧、前连接头、后连接头和挡板组成。具体结构如图1所示。

图1 高吸能变刚度缓冲装置结构组成示意图
前连接头和身管通过圆柱销连接,后连接头通过圆柱销与摇架连接。航炮击发时,在火药燃气作用下,航炮后坐,固定其上的液压筒向后运动,推动活塞前腔的液体流向活塞后腔,总共有两股液体流:一股推开单向活门,经单向活门流向后腔;另外一股经活塞杆内腔流液孔流向活塞后腔。液压工作同时压缩环形弹簧,后置矩形缓冲弹簧设置了较为合理的预压力,且大于前置环形缓冲弹簧的预压力,环形缓冲弹簧首先被压缩,此时缓冲装置表现为单刚度缓冲。当前置环形缓冲弹簧所受压力大于后置矩形缓冲弹簧预压力时,挡板开始向右运动,后置矩形缓冲弹簧受压缩,此时两级弹簧构成串联关系,缓冲装置刚度发生改变,从前置环形缓冲弹簧单刚度变为串联缓冲弹簧的刚度。航炮后坐能量由液压阻力耗散和缓冲弹簧吸收,缓冲弹簧的弹簧力是航炮后坐时的主要阻力。后坐过程结束,航炮在缓冲弹簧作用下复进,推动液压筒向前运动。此时,单向活门在复位簧和液体压力作用下关闭,后腔液体经活塞杆内腔流液孔流向前腔。复进时,液压机构产生较大的液压阻力,用来减少航炮阻振时间。复进开始时,2根缓冲弹簧同时作用,当后置矩形缓冲弹簧恢复预压位置时,只有前置环形缓冲弹簧作用。复进到到平衡位置后,由于惯性作用继续前冲,此时前置弹簧恢复预压缩位置,前置弹簧长度不再变化,只有后置弹簧压缩,当前冲的惯性运动停止后,后置弹簧由最大压缩状态开始伸长,在簧力作用下又返回平衡位置,如此反复形成震荡。但由于摩擦力的阻振作用和能量的消耗,航炮会迅速的停止下来进行下一发射击。
3 高吸能变刚度缓冲装置动力学建模
根据当前缓冲装置结构的特点和工作过程,建立其动力学模型,主要假设如下:
1) 中间挡板运动过程中质量忽略不计;
2) 弹簧阻尼忽略不计;
3) 不考虑航炮内部机构运动对缓冲性能影响;
4) 假设航炮质心在身管轴线上;
5) 不考虑垂直航炮垂直于后坐方向的运动对缓冲装置性能影响。
根据以上假设,将航炮缓冲装置简化成为一个非线性振动的弹簧-阻尼-质量系统,其所建立的物理模型如图2所示。

图2 航炮缓冲装置物理模型示意图
航炮缓冲装置在其连续发射过程振动响应问题最终归结为非线性有阻尼受迫振动方程。振动微分方程可表示为:

(1)

以航炮初始的质心位置为起始点建立坐标系,规定力的方向向前为负方向;位移离开平衡位置向后为正,向前为负。变刚度瞬间位移和速度连续。
对于非线性受迫振动系统,航炮运动的的微分方程为:
当前置弹簧力小于后置弹簧预压力时,前置弹簧单独作用,此时微分方程为:

(2)
当前置弹簧力达到后置弹簧预压力时,2根弹簧同时作用,此时微分方程为:

(3)

当速度降为零时,两根弹簧同时作用,由最大压缩状态逐渐伸长,此时微分方程为:

(4)
当后置弹簧恢复预压缩位置,只有前置弹簧作用,此时微分方程为:

(5)

当前置弹簧恢复预压缩位置,前置弹簧长度不再变化,此时只有后置弹簧压缩,进行前冲过程,此时微分方程为:

(6)

当速度为零,后置弹簧由最大压缩状态开始伸长,此时微分方程为:

(7)


(8)
式中:为炮膛截面面积,为装药量,为阻力系数,为弹丸质量,为平均压力,由经典内弹道模型可以求解不同时刻内平均压力,为炮口平均压力(内弹道终点),为后效期压力衰减的时间常数。
运动方程(2)~(8)可简写为:

(9)
式中:

4 高吸能变刚度缓冲装置优化模型

4.1 高吸能变刚度缓冲装置约束条件建立
航炮缓冲装置参数设计需满足以下要求:
1) 预压力除能减小后坐力外,还能保证航炮恢复并保持在平衡位置,故在设计时应使预压力大于摩擦力及全炮在使用过程中承受的过载与本身质量乘积之和。全炮在使用过程中承受的过载一般取(3~4)。

(10)
2) 航炮最大后坐长越大,在其他条件不变时,后坐力较小;但最大后坐长过大会影响供弹机构工作可靠性,一般最大后坐长控制在30 mm以内。
≤30 mm
(11)
3) 航炮射击全阻振时间应小于其一个工作循环的时间,否则会导致后坐力叠加,缓冲器因过载而损坏。
≤
(12)
式中,为航炮一个工作循环的时间,为0.2 s。

(13)
4.2 高吸能变刚度缓冲装置优化模型建立
基于构建的优化数学模型,本文选用第二代带有精英保留策略的非支配排序的遗传算法(NSGA-Ⅱ)对航炮缓冲装置参数进行优化。首先对航炮高吸能变刚度缓冲装置结构设计参数的初始种群进行非支配排序,通过遗传算法生成第一代缓冲装置设计参数种群,然后对第一代种群进行交叉变异等操作,得到下一代种群,并将子代和父代种群进行合并,对新生成的种群进行快速非支配排序,选择生成新的父代种群,最后重复上述操作算流程,直到计算停止。
取航炮后坐力最小为目标函数,优化的数学模型描述如式(14)所示。

(14)
通过遗传算法,利用Matlab软件编程得到缓冲装置结构参数的最优解,如表1所示。
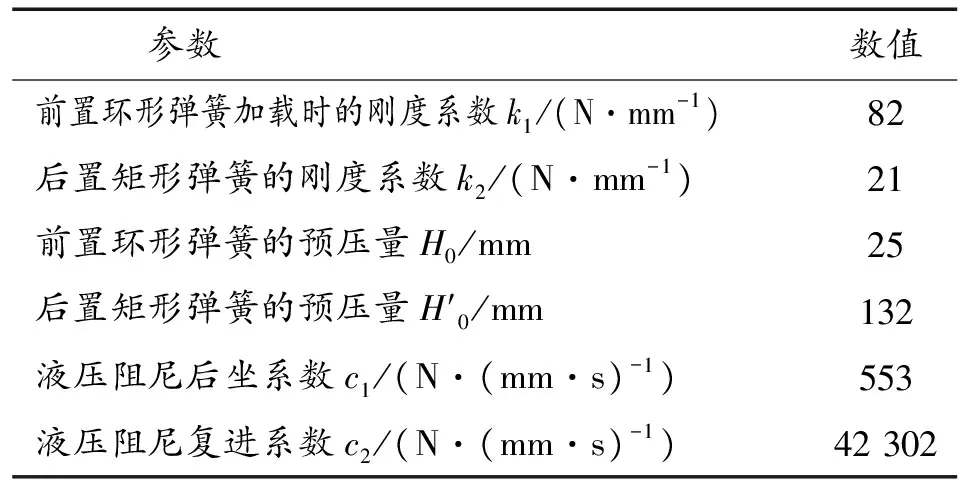
表1 航炮缓冲装置结构参数优化结果Table 1 Results of structural parameters of buffer device for aircraft gun
5 数值计算与试验验证
采用优化后的结构参数进行航炮缓冲装置的设计,设计的航炮缓冲装置实物照片如图3所示。

图3 航炮缓冲装置实物照片
搭建试验台架,对航炮高吸能变刚度缓冲装置工作特性进行试验验证,将激光位移传感器直接安装在刚性支座上,激光点照射在航炮后坐复进零件上,测量航炮后坐位移。将压电力传感器直接安装在缓冲装置与试验台架之间,通过被测件后坐过程中对力传感器的作用力,测量航炮后坐力。航炮后坐位移和后坐力测试原理如图4所示。
后坐位移测试现场布置图如图5。
后坐力测试现场布置图如图6。

图4 航炮后坐位移和后坐力测试原理框图

图5 航炮后坐位移测试验现场布置图

图6 航炮后坐力测试现场布置图
试验测试航炮3连发射击时的后坐位移和后坐力曲线。试验测试和仿真得到的航炮高吸能变刚度缓冲装置后坐位移曲线如图7,后坐力曲线如图8。在本文后续介绍中航炮高吸能变刚度缓冲装置简称缓冲装置1,航炮原单刚度普通弹簧液压缓冲装置简称缓冲装置2。

图7 缓冲装置1测试和仿真后坐位移曲线
由图7可以看出缓冲装置1仿真位移曲线和测试位移曲线走势基本一致,航炮射击后,首先由平衡位置进行后坐,后坐到位后进行复进,复进到到平衡位置后,由于惯性作用继续前冲,此时前置弹簧恢复预压缩位置,前置弹簧长度不再变化,只有后置弹簧压缩,当前冲的惯性运动停止后,后置弹簧由最大压缩状态开始伸长,在簧力作用下又返回平衡位置,如此反复形成振荡。但由于摩擦力的阻振作用和能量的消耗,航炮会迅速的停止下来进行下一发射击,一般航炮缓冲器动力学运动基本服从上述规律,只是特征值数值不同。
由图8可以看出缓冲装置1测试后坐力曲线和仿真后坐力曲线走势基本一致。

图8 缓冲装置1测试和仿真后坐力曲线
由图7和图8得到缓冲装置1测试和仿真后坐位移和后坐力结果如表2所示。
由表2可以看出仿真后坐位移和测试后坐位移最大误差为4.4%,仿真后坐力和测试后坐力最大误差为4.1%。由缓冲装置1仿真和测试结果可知:所建立的高吸能变刚度缓冲装置动力学数学模型能够对其动力学特性进行准确预测。

表2 缓冲装置1测试和仿真后坐位移和后坐力结果Table 2 Comparison between test and simulation results of recoil force and recoil displacement for buffer device 1
缓冲装置1和缓冲装置2测试的后坐位移曲线如图9,其曲线走势相差较大。

图9 缓冲装置1和缓冲装置2测试后坐位移曲线
由图9得到缓冲装置1和缓冲装置2试验测试的后坐位移曲线结果如表3所示。

表3 缓冲装置1和缓冲装置2测试后坐位移结果Table 3 Comparison between test results of recoil displacement for buffer device 1 and buffer device 2
由表3可以看出缓冲装置1测试后坐位移平均值比缓冲装置2测试后坐位移平均值小4.9%,同时缓冲装置1测试前冲位移平均值较缓冲装置2测试前冲位移平均值小60.6%。这是因为缓冲装置1通过高耗能的液压和环形弹簧介质把航炮射击产生的大部分后坐能量吸收,使前冲能量大幅度减少。后坐位移较小有利于提高供弹系统工作可靠性,前冲位移较小有利于提高射击稳定性。
缓冲装置1和缓冲装置2测试的后坐力曲线如图10。

图10 缓冲装置1和缓冲装置2测试后坐力曲线
由图10可以看出缓冲装置1和缓冲装置2试验测试后坐力曲线走势相差较大,其后坐力如表4所示。

表4 缓冲装置1和缓冲装置2测试后坐力结果Table 4 Comparison between test results of recoil force for buffer device 1 and buffer device 2
由表4可以看出缓冲装置1测试后坐力平均值比缓冲装置2测试后坐力平均值小12.9%,同时缓冲装置1前冲力平均值较缓冲装置2测试前冲力平均值小72.3%。这是由于缓冲装置1把航炮在射击时的产生的大部分后坐能量被高耗能的液压和环形弹簧介质吸收,转换为热能,使得前冲力大幅度降低。后坐力和前冲力小有利于提高射击精度。
6 结论
1) 缓冲装置1测试后坐位移和仿真后坐位移最大误差为4.4%,测试后坐力和仿真后坐力最大误差为4.1%,说明所建立的高吸能变刚度缓冲装置动力学数学模型预测动力学特性准确。
2) 高吸能变刚度缓冲装置在后坐位移和前冲位移小的条件下比原单刚度普通弹簧液压缓冲装置后坐力平均值降低12.9%,前冲力平均值降低72.3%。由于后坐力和前冲力大幅度减小,航炮的连发射击时的后坐力较为稳定,射击精度提高。
