基于5G技术的高速公路事件智能检测现状研究
2022-05-09徐学富李珺孙振兴
徐学富 李珺 孙振兴

【摘要】 我国高速公路建设取得了瞩目的成绩,与此同时,交通安全保障面临巨大压力。5G技术的不断发展为高速公路事件智能检测的研究提供了新的思路,本文归纳总结目前已有的高速公路事件检测方法,并展望未来的发展方向,对高速公路事件检测系统建设提出建议,并为后续研究提供参考思路。
【关键词】 高速公路 5G 交通事件检测 交通安全
引言:
近些年,高速路网越来越完善,高速公路上的车辆也越来越多,随之产生的交通拥堵、交通安全等问题日益突出。高速公路上的车辆与普通公路上的车辆相比车速较快,一旦发生交通事故,后果会十分严重。
交通事件定义为经常发生的非重复性事件[1]。交通事件又分为可预测事件和不可预测事件。可预测事件主要有交通事故、行人穿越、车辆故障等异常行为、路面抛洒物、自然灾害等,不可预测事件主要有大型活动、高速公路养护等。对于可预测事件,驾驶员可以事先规避;而对于不可预测事件,驾驶员无法事先规避,极有可能造成重大事故,所以对高速公路不可预测的交通事件进行检测显得至关重要。本文主要对不可预测事件中的行人、车辆异常行为、路面抛洒物检测方法进行总结归纳,并对结合5G技术对未来发展方向提出构想,最后对检测系统建设提出建议。
一、高速公路事件检测方法
(一)高速公路行人检测方法
高速公路行人检测技术可以确保高速公路上的车辆能够安全运行,避免车辆受到行人的干扰,减少事故的发生率。然而在检测过程中容易受人体姿态、光照强度、天气变化、遮挡等问题影响,从而导致检测的精度不高。因此,在复杂的自然交通场景下,如何实现准确、实时检测识别行人是非常重要的问题。
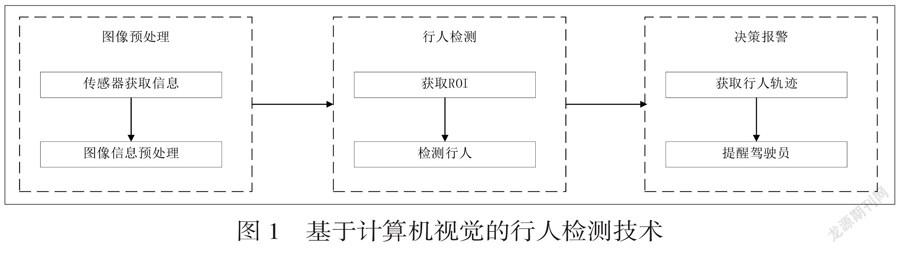
高速公路行人检测技术主要基于计算机视觉技术,基于计算机视觉的行人检测技术主要有以下三个流程:图像预处理、行人检测和决策报警,具体流程如图1所示。传感器获取信息后,首先会对图像信息进行预处理,避免在进行行人检测时受到图像亮度、噪声等因素的影响。图像预处理结束后,系统再对选取的兴趣域(ROI)里的行人进行检测,当检测到兴趣域内有行人并获取行人轨迹后,会提醒驾驶员注意周边的行人。
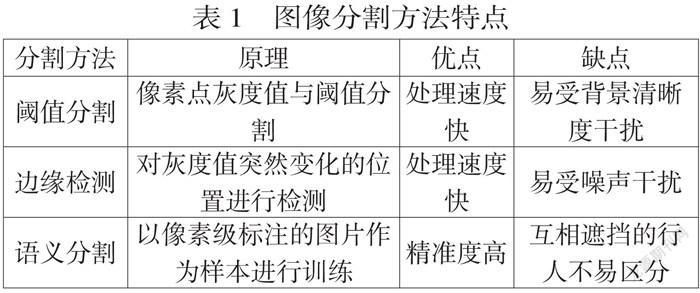
在行人的检测过程中,图像分割能够帮助提取出兴趣域(ROI),图像分割的成果决定了后期行人检测精度,合理的图像分割会使后续的行人检测工作更容易进行。[2]图像分割的发展经过了阈值分割、边缘检测和语义分割三个阶段,[3]各阶段特点如表1所示。
通过图像分割提取兴趣域后,则需目标识别技术来对行人进行检测。目标识别首先需要对行人的特征进行提取,最后通过分类器判断兴趣域内是否有行人。
Dalal[4]提出HOG特征的概念并将其用于行人检测,HOG特征目前使用最广泛,但是其维度较高,计算时速度较慢。Zhu[5]提出积分直方图的概念,提高了计算速度,并通过Adaboost算法建立分类器,相比传统HOG特征提升了检测效果。伍叙励[6]和唐世轩[7]则分别将HOG特征与Haar特征和LBP特征相结合,使用Adaboost算法建立级联分类器,检测性能进一步提高。
随着深度学习的发展,行人检测算法得到了突破,主要分成两类,一类基于候选框,一类基于候选框。基于候选框的方法主要有R-CNN、Fast R-CNN和Faster R-CNN等。基于回归的方法主要有YOLO、SSD等。
Girshick[8]提出了R-CNN,其核心思想是使用分类网络来得到部分图像区域,再将这部分区域输入进CNN当中,以获得区域的一些特性,然后进行分类判断区域内是否有行人。R-CNN具有计算重复的缺点,后续Girshick[9]又将其改进提出了Fast R-CNN,Ren[10]则又继续改进,提出了Faster R-CNN。
为了提升检测速度,避免Faster R-CNN等方法中的提取多个目标候选框特征的过程,Liu[11]提出了SSD,其核心思想是在多尺度特征图上直接进行分类和回归。YOLO网络模型适合于运动目标检测,所以其适用于行人检测。Redmon[12]提出了YOLOv3,其运算速度提升了三倍以上。
王云鹏[13]则提出了基于计算机视觉以外的检测方法,使用微波雷达传感器和地磁传感器对行人进行检测。虽然微波雷达传感器和地磁传感器成本较低,但在设置地磁传感器时,需中断高速公路的交通,对交通造成较大的影响,所以目前的主流方法依旧是基于计算机视觉来对行人进行检测。
(二)高速公路车辆异常行为检测技术
高速公路场景中的车辆异常行为包括异常停车、低速行驶、占用应急车道、倒车、未放置警示标牌等危险行为,检测并及时处理车辆异常行为能及时规避交通事故的发生。
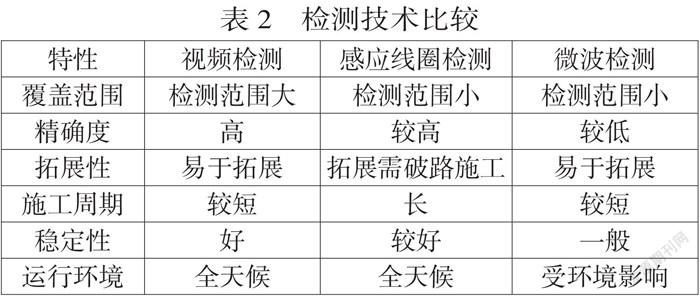
随着视频监控系统的普及以及计算机视觉技术的发展,基于计算机视觉的交通车辆异常行为检测占据了主导地位,逐步取代了早期的基于感应线圈、微波传感器的检测方式。各种检测方式的优缺点如表2所示。
Housni[14]提出了新的检测方法,对传统的光流法进行了改进,算法实现相对较为简单,但缺点是检测精度不高,跟踪效果不够稳定。朱宪飞[15]对车辆的位置进行检测,然后通过车辆位置点采样、聚类等方法处理车辆的轨迹并对当前车辆的行为模式进行识别,但是该方法而且对于密集场景中的车辆轨迹分析容易出现误判。隋靓[16]使用目标追踪技术来还原车辆的轨迹信息,从而判断逆行、超速等车輛异常行为,该方法采用基于GHOST帧差算法的目标检测器,无法在车辆密集场合中使用。为避免交通事故带来的干扰,梁帅[17]借助全局交通流量描述和局部运动方向图从一定程度上提高了系统识别的准确率。姚兰[18]提出的追踪算法减少了轨迹提取过程对背景环境变化的依赖,使得准确率进一步提高。
(三)路面抛洒物检测技术
高速公路抛洒物掉落容易引起高速公路事故,大范围的抛洒物,容易导致车辆绕道,通行速度减缓。而小目标的抛洒物不易被驾驶员发现,导致车辆无法及时避让,从而引发交通事故。抛洒物检测方法主要有基于前景提取、基于深度学习两种方法[19]。
基于前景提取的方法优点在于检测速度比较快,能够找出非路面的目标,再通过对抛洒物在运动轨迹和图像特征方面对前景目标进行筛选,最后检测出路面上的抛洒物。而在高速公路视频中,仍然存在大量的环境噪声,导致抛洒物检测精度不高。基于前景提取的抛洒物检测方法主要有帧间差分法、背景差分法、块像素统计等,[20]其各种优缺点如表3所示。
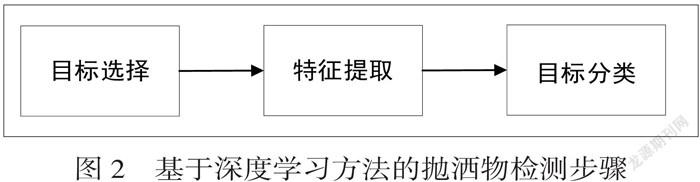
基于深度学习的方法则可以较好地提高精度,其进行抛洒物检测的步骤如图2所示。
阮雅端[21]將抛洒物的检测可以转化为路面、非路面的二分类问题,首先判断图像中是否包含车辆,如果不包含且该区域属于路面的置信度低于非路面的类别,则将其判断为抛洒物。金瑶[22]则基于YOLOv3利用小像素目标更依赖于浅层特征的特点,有效地检测出纸屑、石块等小目标抛洒物。
二、5G技术在高速公路事件检测中的应用分析
(一)5G技术的应用场景
5G技术带来的是能够实现对高速公路情况全面的感知,每个路段、每个机动车的情况都可以实时掌握,并且可以与大数据和人工智能等新技术相结合,增强预警的能力。5G技术的接入改变了监控视频系统本地缓存的模式,还能改变交通管控系统部署方式。
交管部门可以通过5G实时检测交通状况,当遇到突发事件,通过5G将情况下发给相关部门,便于对现场进行及时、高效的指挥。
5G技术的发展可以实现OBU和RSU采集的数据在车辆、行人、路侧和云平台之间的共享,从而扩展车辆传感器探测范围,事件检测范围更加广泛、准确、及时,降低驾驶风险。
(二)高速公路事件检测系统的应用建议
检测系统需建设基础平台和算法平台。基础平台负责云监控管理、智能巡检、应用模型接口开发、数据分析等工作;算法平台则针对高速公路上的各类异常事件,采用深度学习等人工智能算法进行核心算法研究。基础平台基于高速公路视频监控资源安全管理需要,仅在内网部署。其中应用服务器用于提供系统的应用服务;GPU服务器用于接口服务开发部署,为深度学习人工智能模型服务提供图形处理支持。算法平台可以自动采集各类交通异常事件图像与视频,分类组织标注图片,形成高速场景下的深度学习标准数据集。标注的类型包括道路分割标注与目标检测标注。总标注份数达到100万份以上,并根据需要适时拓展数据资源。系统经过建设,需达到以下目标:
1.能够实现高速公路上各类交通异常事件的自动检测,包括:车辆停驶、行人穿越、抛洒物、烟雾、火灾、拥堵等情况;
2.正常天气条件下,各类事件准确预报率达到90%以上;非正常天气条件下,各类事件准确预报率达到80%以上;
3.各类高速公路交通突发事件自动上报,应急处置及反馈时间控制在1-5分钟以内。
三、结束语
基于5G技术的高速公路通过全面的前端感知网络与后台数据分析研判,全面实时掌握道路通行状况。提高高速公路综合交通管理水平,提升服务质量,为行业管理单位提供了一种高速交通智能监测与管理思路,以本系统的建设带动智慧交通产业化发展。
通过监控设备的视频分析,及时发现高速公路异常情况,减少报警反应时间;通过加强与交警、高速业主之间的动态联动,加强相关部门之间的协作,减少部署联络时间;有效疏导高速公路客流,减少高速公路车流疏散时间;诱导驾驶员降低行驶速度,避免二次事故的发生。系统的建设将推动新一代人工智能技术在智慧高速领域的研发与技术积累,抓住当前算力、算能、带宽升级换代的科技机遇,实现产业科技创新发展。同时有效填补了因科技发展而导致的相关行业创新软件研发落后的状态。
参 考 文 献
[1]姜桂艳, 温慧敏, 杨兆升. 高速公路交通事件自动检测系统与算法设计[J]. 交通运输工程学报, 2001(01): 77-81.
[2]杨红亚, 赵景秀, 徐冠华, 等. 彩色图像分割方法综述[J]. 软件导刊, 2018,17(04): 1-5.
[3]耿艺宁, 刘帅师, 刘泰廷, 等. 基于计算机视觉的行人检测技术综述[J]. 计算机应用, 2021,41(S1): 43-50.
[4] DALAL N, TRIGGS B. Histograms of Oriented Gradients for Human Detection: IEEE Computer Society Conference on Computer Vision & Pattern Recognition[C], 2005.
[5] ZHU Q. Fast Human Detection Using a Cascade of Histograms of Oriented Gradients: CVPR ‘06 : Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Washington, DC, USA[C], 2006.
[6]伍叙励. 基于HOG和Haar联合特征的行人检测及跟踪算法研究[D]. 电子科技大学, 2017.
[7]唐世轩. 基于HOG与LBP联合特征的行人检测算法研究[D]. 中国矿业大学, 2019.
[8] GIRSHICK R, DONAHUE J, DARRELL T, et al. Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation[J]. IEEE Computer Society, 2013.
[9] GIRSHICK R. Fast R-CNN[J]. arXiv e-prints, 2015.
[10] REN S, HE K, GIRSHICK R, et al. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 2017,39(6): 1137-1149.
[11] LIU W, ANGUELOV D, ERHAN D, et al. SSD: Single Shot MultiBox Detector[J]. Springer, Cham, 2016.
[12] REDMON J, FARHADI A. YOLOv3: An Incremental Improvement[J]. arXiv e-prints, 2018.
[13]王云鹏, 罗渠元, 李长乐, 等. 基于智慧公路的行人检测技术研究与实现[J]. 物联网学报, 2019,3(03): 84-89.
[14]HOUSNI K, MAMMASS D, CHAHIR Y, et al. Moving Objects Tracking in Video by Graph Cuts and Parameter Motion Model[J]. International Journal of Computer Applications, 2012,40(10): 20-27.
[15]朱宪飞. 交通系统监控环境下车辆异常行为识别算法研究[D]. 山东大学, 2018.
[16]隋靓. 高速公路交通异常事件检测算法研究[D]. 兰州交通大学, 2017.
[17]梁帅. 基于機器视觉的交通异常事件检测算法研究[D]. 电子科技大学, 2017.
[18]姚兰, 赵永恒, 施雨晴, 等. 一种基于视频分析的高速公路交通异常事件检测算法[J]. 计算机科学, 2020,47(08): 208-212.
[19]欧阳聪宇. 基于背景分离混合高斯模型的高速公路小目标抛洒物检测[D]. 浙江大学, 2020.
[20]汪贵平, 马力旺, 郭璐, 等. 高速公路抛洒物事件图像检测算法[J]. 长安大学学报(自然科学版), 2017,37(05): 81-88.
[21]阮雅端, 高妍, 张宇杭, 等. 基于深度卷积网络的路面遗留物检测方法:
[22]金瑶, 张锐, 尹东. 城市道路视频中小像素目标检测[J]. 光电工程, 2019,46(09): 76-83.
