二氧化铀产品桶自动翻转卸料装置的设计
2022-04-27罗一峰
罗一峰
(中核二七二铀业有限责任公司,湖南 衡阳 421004)
二氧化铀是铀转化生产过程中必不可少的原料,二氧化铀投料是铀转化安全生产的重要组成部分。铀纯化系统生产的二氧化铀产品,其包装容器主要有2种结构,其中一种包装容器的卸料口在容器底部,可以直接拆卸底盖进行投料;另一种包装容器的卸料口在容器顶部(以下简称为上卸料容器)。在铀转化生产系统运行过程中,存在使用两种包装容器的情况。对于上卸料容器,由于二氧化铀粉末粒径较小,在室温下可能与空气中的氧气发生反应,严重时会产生自燃[1],故不能采用负压抽吸转料,须通过翻转进行投料。
在制造业中比较通用的做法是采用钢丝绳与起重机配合,通过手动控制方式实现翻转投料[2]。在核电高速发展及自动化趋势不断增强的情况下,这种手动控制投料方式很难适应发展的需要。目前自动翻转装置已成为国内外制造装备行业的一种必不可少的辅助机械,在汽车、冶金、核电等许多行业的生产、制造和加工过程都有应用[3-7]。因此,有必要设计自动翻转装置来实现对上卸料容器的高效、安全投料。
1 铀转化生产系统翻转投料现状
1.1 手动控制翻转投料操作流程
目前铀转化生产系统在接受上卸料容器时,其投料操作流程:1)1人操作行车吊装上卸料容器至流化床系统投料口;2)1人打开上卸料容器顶部桶盖,并在投料口安装橡胶圈(密封处理);3)1人操作行车吊钩挂取上卸料容器的一侧,并扶住上卸料容器对准流化床进料口,确保翻转过程中上卸料容器不发生晃动,操作行车起吊翻转上卸料容器进行投料,投料过程中操作人员需时刻关注橡胶圈的密封状态,不定时地反馈上卸料容器的翻转角度与进料速度,以便于精准操作行车完成投料过程;4)投料完成后,借助钢丝绳配合行车对上卸料容器进行翻转复位,最终完成整个投料操作。
1.2 手动控制投料操作存在的问题
在上卸料容器投料过程中,上卸料容器重心不断变化,存在一定安全风险。手动控制投料操作存在如下问题:1)在使用行车倾倒投料过程中,桶易出现滑动,易发生设备及人身事故(其中扶住上卸料容器的操作人员安全风险最大);2)橡胶密封圈容易老化失去弹性,无法形成有效密封,投料过程中易出现物料泄漏喷溅的风险,对操作人员及生产环境造成伤害;3)在对接接口处未设置隔离装置,在操作过程中遇到生产系统设备故障时,无法及时停止投料操作,易造成投料口堵塞,形成不可控状态;4)流化床生产系统的物料进料口与上卸料容器的出口存在尺寸偏差,在倾倒投料过程中,由于二氧化铀物料颗粒小、易扬尘的特性,极易引起喷料飘撒,对厂房环境、职业健康安全、核材料回收率都有影响;5)投料过程劳动强度大、效率低,生产成本较高。
2 翻转卸料装置整体设计方案
目前,铀转化生产线的二氧化铀物料是由转运区吊装至投料区,转运区和投料区高度差约12 m,须使用行车进行吊装转运。投料区是钢结构设计,无法增设自重太大的大型投料设备。结合中核二七二铀业有限责任公司铀转化生产厂房结构和生产现场实际情况,设计全新的、适用于上卸料容器的翻转卸料装置。
2.1 待翻转容器的特征和基本参数
上卸料容器的基本特征形状如图1所示,侧面呈圆弧状;容器除上部端盖外,其中下部均同一尺寸,容器直径φ670;容器带料整体质量500 kg以上。此模型是在保持上卸料容器的基本特征的前提下做了一定的简化,既能保证翻转装置的准确可靠性,也能简化设计过程。

图1 上卸料容器
2.1.1 翻转装置功能要求
翻转卸料装置的作用是改变传统的手动控制翻转投料,对上卸料容器进行机械式自动翻转180°投料,对于此翻转装置的具体要求有:1)翻转装置为“开放”型,即待翻转的上卸料容器能直接进入翻转装置内,翻转完成后可直接由行车吊装运离,也就是翻转前后均不需要传送装置进行转运;2)翻转装置需增设驱动系统翻转180°,且具有反转的功能,占地面积尽可能小;3)操作简便,带自动化系统;4)具有夹紧装置和防脱落功能,消除容器翻转操作过程中因本体较重出现滑落;5)解决投料过程中因密封性差造成物料泄漏的问题,并具有控制投料量的功能;6)能准确有效地对上卸料容器进行自动翻转,操作过程效率高、安全性能高。
2.1.2 自动翻转装置设计概述
设计制作的自动翻转卸料装置如图2所示。自动翻转卸料装置由翻转支架及吊耳、驱动系统、夹具及锁紧装置、配重块等构成。

1—保险吊环;2—夹具(开口式抱箍装置);3—锁紧装置;4—气动马达、减速机;5—翻转支架;6—支架吊耳;7—配重块。
翻转支架及吊耳能够实现运输和翻转等功能,结构简单,为敞开式,便于上卸料容器的对位安装。驱动系统以压缩空气为传递动力,实现气压驱动,其优点是结构简单、成本较低,易实现无级调速,阻力损失小,动作反应快,能在高温下工作,符合铀转化生产现场的环境条件。开口式抱箍夹具能够将上卸料容器平稳固定,结合锁紧装置可以消除其翻转过程中的安全隐患。配重块能够消除翻转过程中因重心不稳而产生的晃动。
2.2 翻转支架的研制
针对生产现场空间较小、不便于借助大型设备辅助投料的情况,要求设计的翻转卸料装置轻便灵活、结构简单。因在上卸料容器投料过程中,翻转动作为定点旋转,要求自由度较少;同时考虑单桶(含物料)质量在500 kg以上,为保证上卸料容器翻转过程中的安全及整体支架的强度,装置采用龙门框架式支承结构,如图3所示。该支承结构的刚度大、结构稳定、造价低廉,举起同等质量物体所受应力小,能满足实际需求。考虑其支架在使用过程中的稳定性,底部两端增加配重块,保证使用过程中不出现晃动现象。
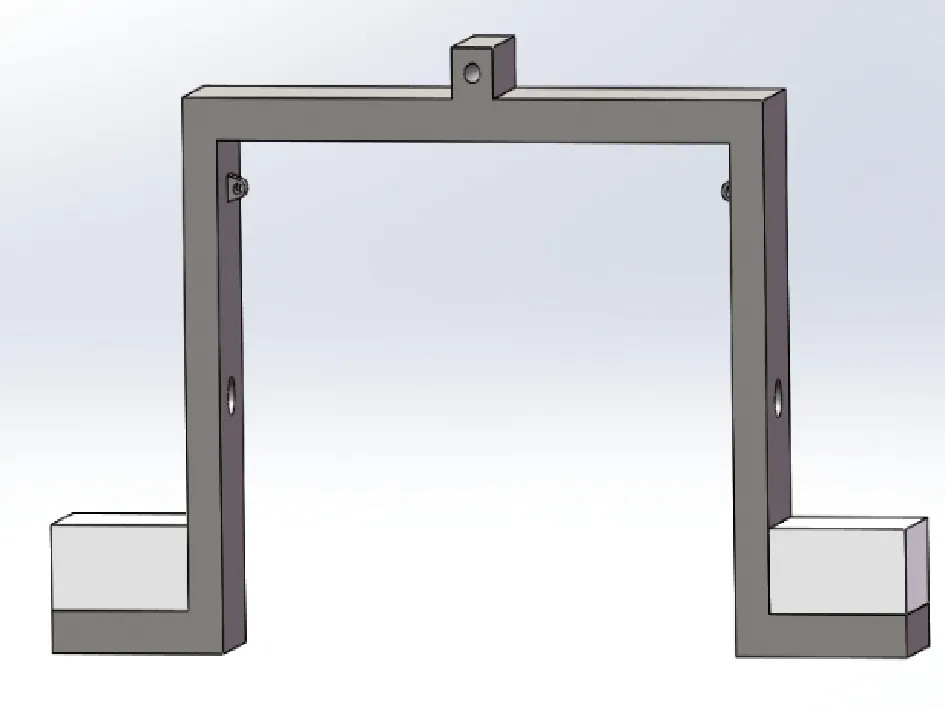
图3 翻转支架示意图
2.3 上卸料容器夹具的研制
要实现上卸料容器整体自动翻转,必须保证上卸料容器固定装置的强度。在制造行业中,夹具按使用范围可分为通用夹具和专用夹具,夹具的主要形式有爪式和抱箍式[8]。爪式夹具的优点是适用范围广,能抓取各种尺寸的工件;但因其接触面小,不能抓取过重的物体,不适用翻转卸料装置的应用。抱箍式夹具使用范围小,仅能夹取某一特定形状的物体;但其接触面大,能抓取重物。
铀转化系统中上卸料容器规格统一,所以选用专用夹具。针对上卸料容器的外壁均为圆弧状,且桶的质量较大,采用抱箍式夹具。另外,考虑到投料操作属重复性操作,为使操作过程简单方便,夹具(抱箍装置)形式采用开口式活动门,附加机械式反扣锁,上卸料容器夹具如图4所示。

图4 抱箍式锁紧机构示意图
抱箍式夹具要使料桶夹紧且不滑落,则它的最大静摩擦力(f静)应大于料桶的自重(G),即f静≥G
f静=μFn≥G。
(1)
正压力Fn是抱箍对料筒的夹紧力,夹紧力越大,对料筒的正压力就越大。为增加装置的抗滑落能力,在抱爪内表面处附着一层橡胶垫。橡胶与碳钢的静摩擦系数μ为0.6~0.8,取0.6,则使抱箍装置能夹紧料筒且不发生滑落的理论压力Fn=500×9.8/0.6=8 167 N。为方便计算,取夹具对料桶的压力为8 200 N。
2.4 动力推动方式的选择
工业上常用的推动方式有气动式、液压传动式和机械传动式,气动式的气动缸体积较大,本体泄漏点多,维护维修较复杂;液压式的优点是传动稳定,传动精度高;但液压元件造价高,维修成本高[9]。基于现场的操作空间及翻转卸料装置的外观设计要求,不宜考虑气动式和液压传动式,设计采用机械传动式,该种传动具有结构简单、设备本体质量较轻、维护保养方便的特点。
翻转卸料装置机械传动方式的工作原理如图5所示。通过气动马达(4VA双向减速气动马达)带动蜗轮减速机,减速机依靠齿轮带动联轴器旋转,上卸料容器夹具(抱箍装置)通过联轴器的牵引进行转动,实现对上卸料容器的翻转。

图5 动力推动工作原理示意图
2.5 对接接口的尺寸偏差及密封性
二氧化铀具有放射性,泄漏至环境中会对人体造成一定的伤害。另外,流化床生产系统会因生产条件变化使得系统运行参数不断变化,为保证其系统的运行稳定,需对二氧化铀进料量进行控制。
在二氧化铀投料过程中,投料口与上卸料容器出口有一定的尺寸偏差,原设计安装O形胶圈,依靠上卸料容器自身质量对其进行压缩式密封;但在使用过程中因生产设备温度高,造成胶圈老化、弹性降低,连接点无法形成有效密封。
本次设计制作了专用桶盖(异径接头),解决投料口与上卸料容器出口的尺寸偏差问题;并在专用桶盖上增加插板阀,保证投料操作过程中物料的进料量处于可控状态,如图6所示。为保证对接接口的密封性,在接口两端安装橡胶密封圈,使专用桶盖接口与投料口完全契合而形成线密封,提高密封效果。

图6 专用桶盖示意图
2.6 翻转卸料装置自动控制设计
为实现翻转卸料装置自动化操作,利用气动马达作为主动力源,采用马达带动蜗轮减速机(能自锁)作为翻转动力源,通过减速机带动活动抱箍门进行180°旋转,完成整个翻转卸料动作。用高压软管加控制阀控制进气量,控制阀可对马达进行关停操作;增加三位四通手转阀,翻转投料完成对其进行自动复位操作。
2.7 翻转卸料装置安全性设计
由于上卸料容器(含物料)直径φ670,质量在500 kg以上,在投料操作中整个产品桶需要翻转倒料,易出现滑桶、脱落的现象;因此产品桶的抱箍装置除了设置用手动机械锁紧装置外,加装1套以钢链条作为保险吊环的防止产品桶滑落的保护装置,确保安全。
3 抱箍式锁紧机构的力学仿真分析
有限元分析技术计算精度高,适应于各种形状复杂的零件,是工程分析的常用手段[10]3,笔者运用SolidWorks Simulation对翻转卸料装置的关键零部件——抱箍式锁紧机构进行力学分析,结合静态分析的结果为失效判断提供参考,验证设计方案的合理性。
3.1 锁紧机构材料选择
打开抱箍式锁紧机构的三维模型,在SolidWorks Simulation中建立静态算例,选择锁紧机构材料为普通碳钢。普通碳钢的弹性模量为2.1×105N/mm2,泊松比为0.28,屈服强度为220.594 N/mm2,张力强度为399.826 N/mm2。
3.2 装置结构分析
通过分析抱箍式锁紧机构的链接与运动原理,可以看出夹具受力的主要部分在锁紧机构和抱箍部分,桶抱箍和翻转支架及气缸连杆为转动副链接。
3.3 施加载荷
为了研究抱箍式锁紧机构在工作时所受的载荷大小,对抱箍进行受力分析并施加载荷。抱箍对料筒的压力约为8 200 N;根据牛顿第三定律,可得夹具表面所受的压力也约为8 200 N。夹具内表面同时还受到切线上的摩擦力;但该摩擦力在竖直方向,只对机架有影响,对抱箍式锁紧机构的影响可忽略不计。所以,对抱箍内表面施加8 200 N垂直表面向外的压力。
3.4 网格划分
在给实体对象划分网格时不仅要考虑网格数量、类型、几何形状,还需要考虑有限元网格的精度和计算效率等问题[10]2。根据实际,将本算例的网格单元大小设置为15 mm,公差为0.75 mm,雅可比为4,其他参数选择默认值,抱箍式锁紧机构的网格划分如图7所示。
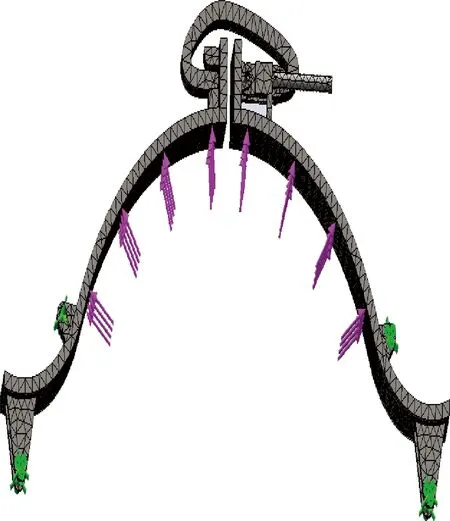
图7 抱箍式锁紧机构网格划分图
3.5 仿真结果分析
抱箍式锁紧机构的应力分析如图8所示,位移如图9所示。可以看出,加载应力后抱箍式锁紧机构的最大应力为78.04 N/mm2,最大位移为0.687 mm。最大应力远低于材料的屈服强度(220.594 N/mm2),满足实际使用要求。
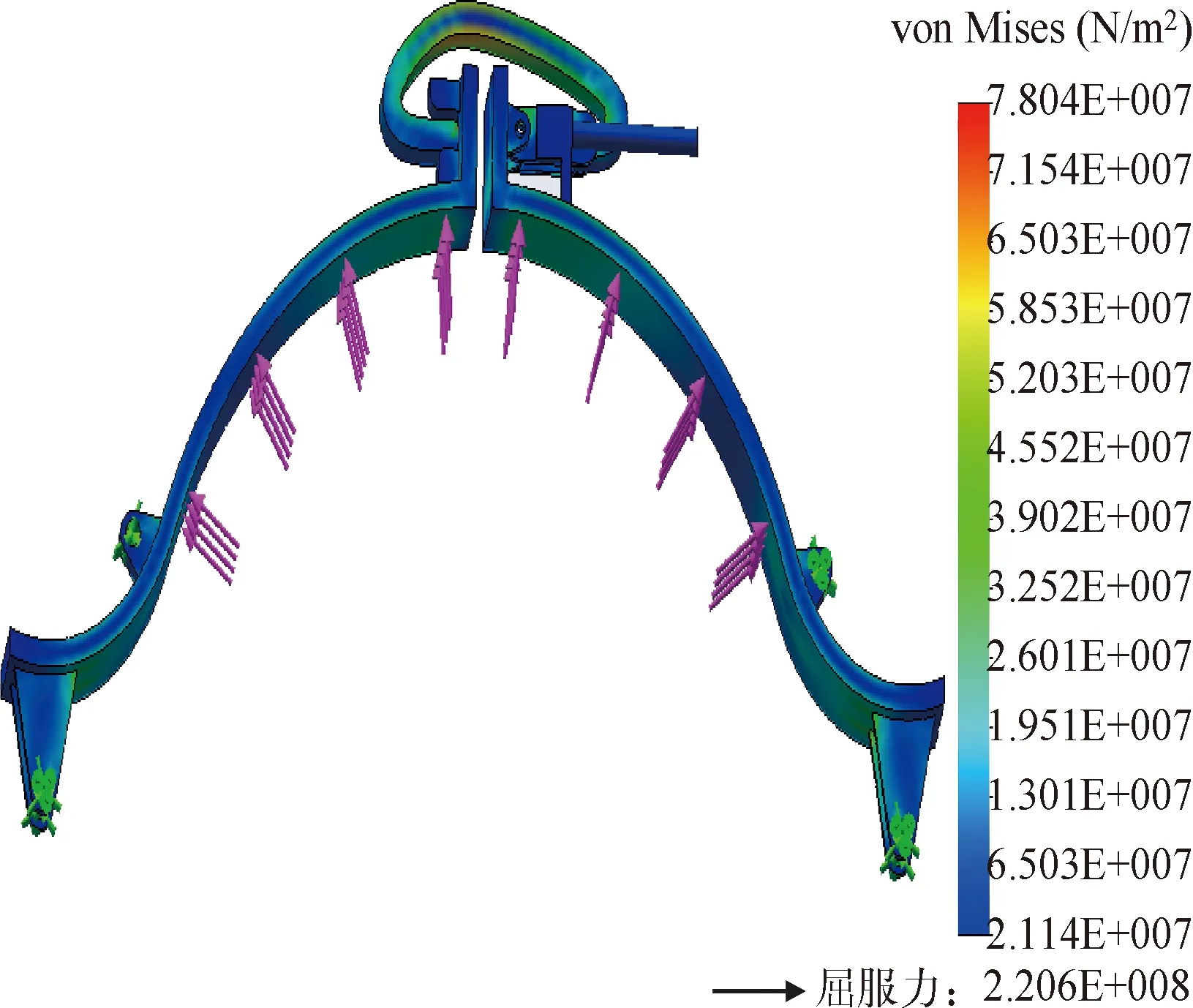
图8 抱箍式锁紧机构应力分析图
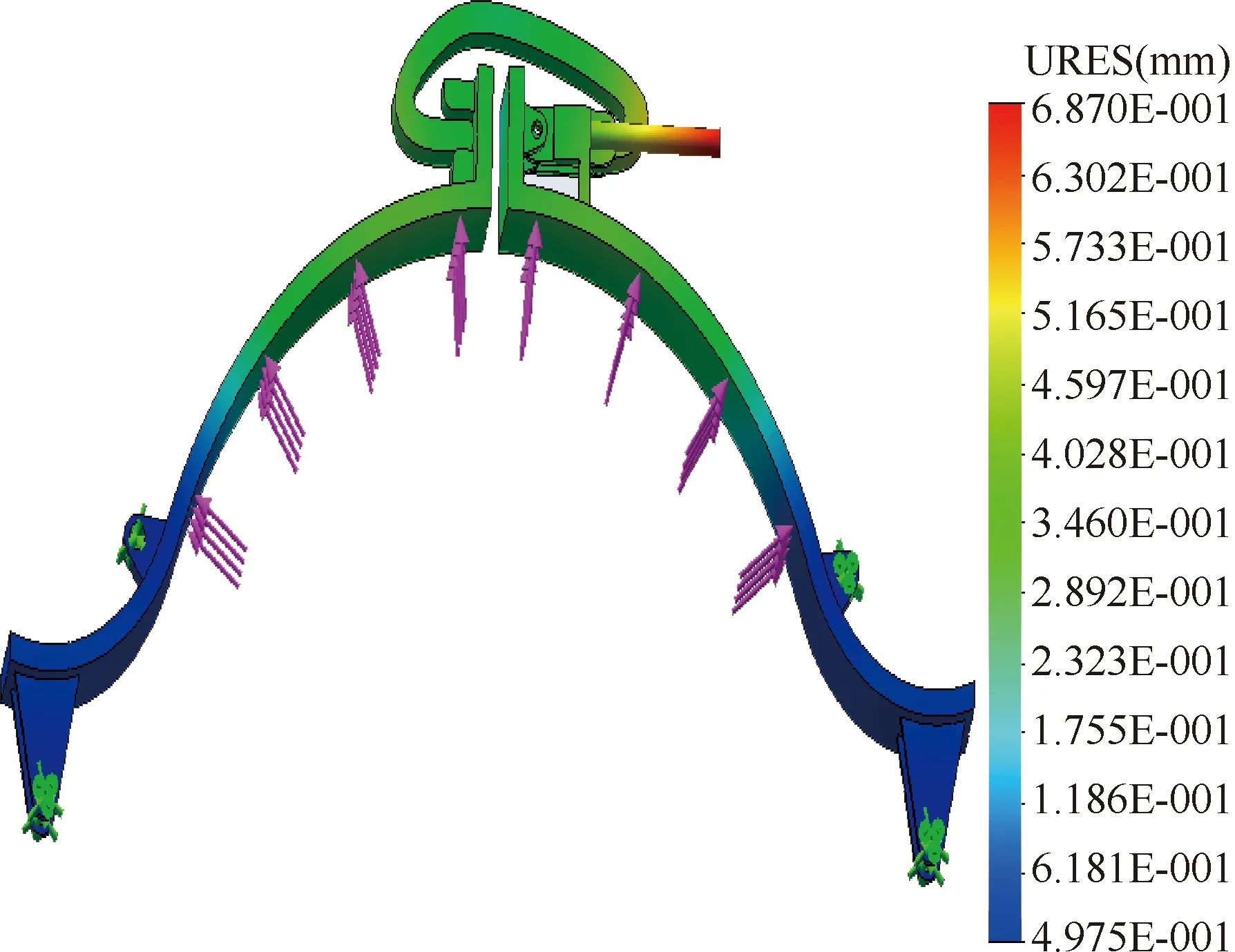
图9 抱箍式锁紧机构位移图
4 翻转卸料装置使用效果
设计的翻转卸料装置已经在现有铀转化生产线上得以应用。该翻转卸料装置操作只需2人配合即可完成整个投料动作,1人拆除容器端盖并安装专用桶盖;另1人操作行车吊取翻转装置,使其与上卸料容器进行对位,并安装锁紧装置、防脱落装置。行车操作人员将上卸料容器吊装至流化床生产系统投料口后,打开气动控制阀门使翻转装置自动翻转180°;并操作行车吊取翻转装置对准对接接口,打开插板阀进行投料。待投料完成后,操作翻转装置进行反转复位,拆除专用桶盖,容器端盖进行复位,完成整个投料操作。
4.1 翻转卸料装置可靠性验证
该翻转装置安全有效地完成1 000余桶物料的投料工作,相比手动控制翻转投方式,避免了翻转过程中人员近距离接触容器,实现远距离操作,提高了操作安全性;同时翻转卸料装置更快捷、方便。2种翻转方式操作时间和操作人员安全性对比见表1、表2。

表1 自动翻转卸料装置投料
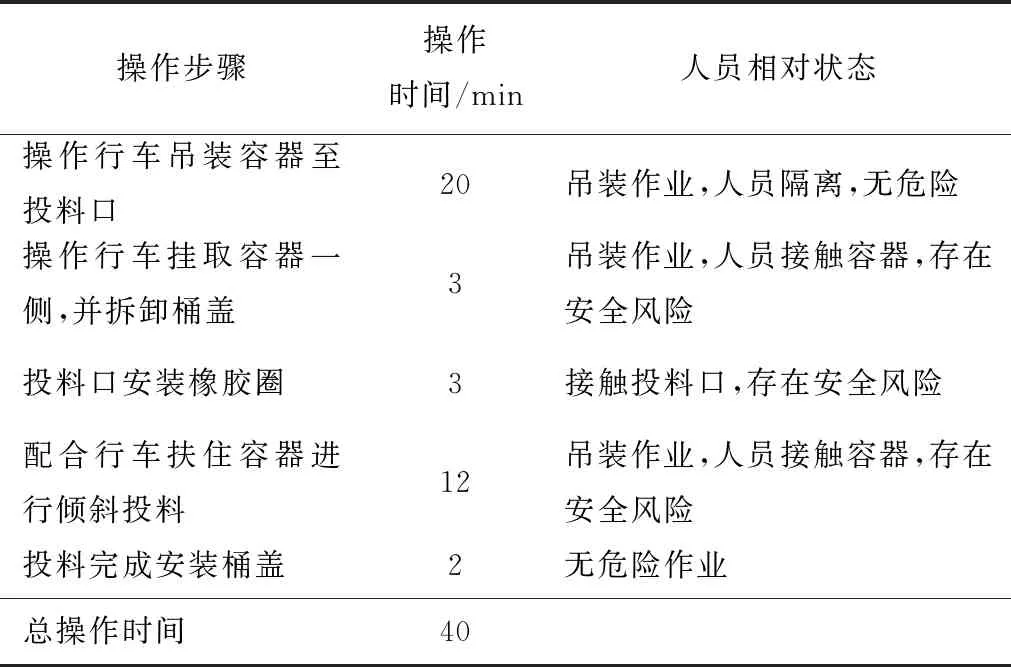
表2 手动控制翻转投料
手动控制翻转投料操作复杂,操作过程中需3人协调配合,才能完成投料操作,投料操作时间20~25 min;而且在投料过程中大量物料粉尘会随排空气体喷洒到设备、管道及厂房等部位,每次至少需要20~30 min进行物料收集。使用翻转卸料装置后,只需2人操作,投料操作时间仅为15 min。
4.2 翻转卸料装置的常见问题及解决措施
4.2.1 运动构件磨损
在使用过程中,该装置翻转支架两端的轴承会因一些外部因素导致出现磨损。检修安装时,检修人员操作不当,会造成轴承游隙过大或过小,内外圈不同心,致使该装置在使用中出现故障。另外,轴承润滑不良、轴承污染、轴承疲劳等问题都会造成轴承损坏。对此要求检修人员按检修规程认真检修安装,定期对轴承进行润滑或定期更换轴承。
4.2.2 锁紧装置拉手强度
翻转卸料装置与上卸料容器对位后,抱箍锁紧装置安装位置在桶450 mm高度;但其锁紧装置的安装会因现场操作人员的变化而影响其安装位置尺寸,造成锁紧装置需要操作的力度不同,致使拉手材质强度不够出现断裂的情况。为解决这一情况,需增加拉手加工尺寸,确保其锁紧装置拉手强度。
5 结论
设计的自动翻转卸料装置利用气动马达带动蜗轮减速机(能自锁)作为翻转动力源,抱箍式锁紧机构作为夹具,配合翻转支架、控制系统等其他部件,实现了二氧化铀卸料过程的自动化。设计的专用桶盖能确保投料过程中物料无泄漏,桶盖上的插板阀能够控制二氧化铀投料量。
该装置在铀转化生产线上的应用表明,操作过程运行稳定,能够安全可靠地完成投料动作,明显降低了二氧化铀投料操作难度及劳动强度,降低了操作过程的安全风险,提高了现场设备安全管理水平,能满足铀转化生产系统“上卸料容器”的投料需求,能够满足生产及职业安全职业卫生的需求。