多功能相控阵雷达自适应资源调度仿真
2022-04-27史小斌
赵 亮 史小斌
(西安电子工程研究所 西安 710100)
0 引言
相控阵雷达具备波束捷变能力可灵活分配时空资源[1],所以在对多目标跟踪时可以采用传统的边搜索边跟踪方式(TWS)和跟踪加搜索的方式(TAS)。工作在TAS方式时,相控阵雷达根据资源调度器的安排对不同类型目标采取不同的数据率进行跟踪,并在跟踪间隙插入搜索、确认任务,在对目标保持跟踪的间隙保持对指定空域的监视[2]。当不同种类任务执行时间冲突,雷达根据各种自适应调度算法[3]选出优先级最高任务执行。
本文主要对多功能相控阵雷达的自适应资源调度过程和数据处理流程进行研究并利用Matlab/Simulink搭建仿真平台建模仿真。本文通过构建包含雷达回波模拟、信号处理、数据处理、资源调度的相控阵雷达联合仿真平台用以评估雷达工作性能。
1 多功能相控阵雷达资源调度算法
多功能相控阵雷达将需要多部雷达完成的功能集中在一部雷达上,用一部雷达即可执行目标空域监视、目标确认、跟踪、制导等多种任务,雷达在工作中根据不同任务快速切换至不同波束,这也势必导致当多个任务调度时刻相同时会产生竞争关系。为了合理地分配雷达资源,资源调度模块综合考虑任务优先级、截止期,采取某种调度策略给所有任务按综合优先级排序后输出执行事件至雷达发射机,并将延时事件放至下个调度间隔处理,如图1所示[4]。
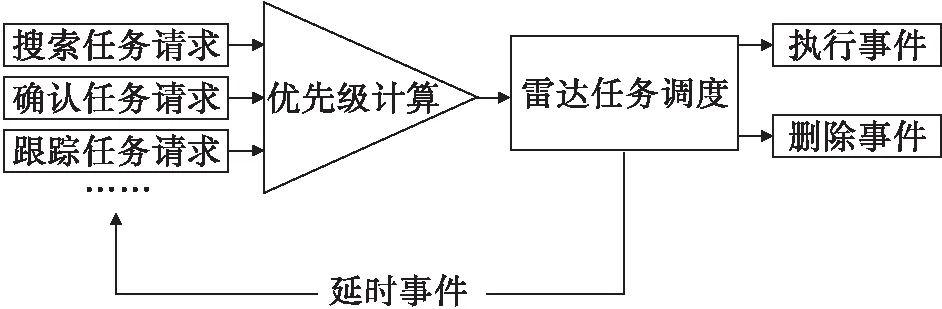
图1 雷达资源调度模型
1.1 任务综合优先级确定
目标的优先级设计一般考虑两个因素:一是任务的重要性。多功能相控阵雷达任务一般分为搜索、确认、跟踪。当搜索任务和确认、跟踪任务冲突时,雷达更倾向于对已有航迹的维护,所以跟踪任务的优先级高于确认任务,搜索任务的重要性最低。同时,对同一种任务类型细分后的优先级也不同,例如雷达对高威胁目标的跟踪优先级要高于低威胁度目标的跟踪优先级,其跟踪数据率也更高。对于搜索任务,因为飞机、舰船目标一般出现于地平线、海平线,所以雷达对地平线区域的搜索任务优先级要高于对高空空域的搜索任务优先级。第二个考虑的因素是任务的截止期。每一个调度任务有一个期望执行时间和截止时间,该任务可能在期望执行时刻未被调度,但在截止时间前该任务都有可能被执行。
若仅仅考虑任务重要性设计优先级,对于低优先级的任务可能永远不会被调度;若仅考虑任务截止期即EDF调度算法,对于快到截止期的任务会被先调度却忽略了任务的重要性。综合考虑任务重要性和任务截止期,得到修正EDF调度算法。假设任务某时刻请求任务队列为T={T0,T1,T2,…},将M个任务分别按重要性从大到小排序得到排序后的NPi,截止期从早到晚优先级排序得到排序后的序号NDi后根据式(1)计算任务的相对优先级spi[5]。
spi=(ηNPi+(M+2-η)NDi)/(M+1)
(1)
η取1时,spi=NDi+NPi/(M+1),为MEDF准则,该准则先考虑任务截止期,若截止期相同再考虑任务重要性;η取M+1时,spi=NPi+NDi/(M+1),为MHPF准则,该准则先考虑任务重要性,若任务重要性相同,再考虑任务截止期;η取M/2+1时,为HPEDF准则,该准则为上面两种准则的折中。
1.2 资源调度仿真方法
本文仿真中通过创建一个任务队列类负责任务的获取、创建、延时、清理,如图2所示。任务获取函数getCurrentJob(),在雷达回波仿真前调用,功能为从任务结构体数组中选出满足当前调度时刻的任务,并按HPEDF准则计算任务的相对优先级输出最高优先级任务给cJob,并记下需要清理的任务的下标,对当前调度间隔无法执行的任务但在下一个调度间隔未超过截止期的任务进行延时处理,在进行雷达回波仿真时,相关模块读取cJob中的波束号,生成该波束指向的模拟回波。任务创建函数createJob根据数据处理结果创建确认,跟踪任务。任务清理函数clearJob清理超过截止期的任务。任务调度流程如图3所示。

图2 任务队列类

图3 任务调度流程图
2 数据处理流程
数据处理主要对信号处理检测数据进行点迹凝聚、坐标转换、航迹起始、点航关联、滤波、航迹删除等操作。
2.1 点迹凝聚
同一目标回波可能分裂在多个距离、速度单元,点迹凝聚作用就是将分裂的点凝聚成一个点。二维点迹凝聚一般分为距离凝聚和方位凝聚。从信号处理输出的点迹信息包括目标距离、方位、俯仰、速度、幅度,在本文仿真中首先对输入点迹进行距离向凝聚,再进行方位向凝聚,凝聚方法采用质心法[6],如式(2)所示。
(2)
其中,Ai为第i个点迹的幅度,Xi为第i个点迹的距离或方位。图4为凝聚点和一次点对比图。

图4 一次点和凝聚点对比
2.2 跟踪滤波

(3)


(4)

Pxz=P(k+1|k)H′(k+1)
(5)
Pzz=H(k+1)P(k+1|k)H′(k+1)+R(k+1)
(6)
式(6)中R(k+1)为k+1时刻量测误差协方差,P(k+1|k)为一步预测误差协方差,如式(7)所示。
P(k+1|k)=F(k)P(k|k)F′(k|k)+Q(k)
(7)
式(7)中F(k)为状态转移矩阵,Q(k)为过程噪声协方差。
2.3 航迹管理
航迹管理包括航迹起始、点航关联、航迹补点、航迹删除等。航迹起始方法有直观法、逻辑法、Hough变换法等[7]。
本文仿真中,点航关联算法采用最近邻域法,使用椭球波门,对落入关联波门内的点按式计算信息加权范数,选最小值关联。

(8)
本文仿真中采用逻辑法起始航迹,首先对未被关联点迹建立航迹头,设定球形波门参数。第二次扫描时,若有点迹关联航迹头则建立临时航迹,并预测第三次扫描波门中心,否则删除航迹头。若第三次扫描有点迹关联则建立确认航迹,航迹起始成功,否则删除临时航迹。航迹管理具体流程如图5所示。

图5 航迹管理流程
3 仿真分析
3.1 仿真流程
本文仿真雷达为一个10×20阵元矩形分布的S波段相控阵雷达,阵元间距为半波长,带宽5MHz,功率1000W,脉冲积累数为32。本文将任务类型分为搜索、确认、普通跟踪、精密跟踪四类,对距离小于10km的目标采用精密跟踪。各任务的采样间隔,时间窗如表1所示。仿真流程如图6所示,式(1)中的η=M/2+1。仿真时序如图7所示,仿真时间间隔设置为100ms,即图7中T0-T1间隔为100ms,在T0间隔执行的任务产生的回波需在T1间隔进行信号处理和数据处理,并调度产生T2间隔的任务指令。在仿真中,将波束号相同但期望执行时间不同的任务同时执行。
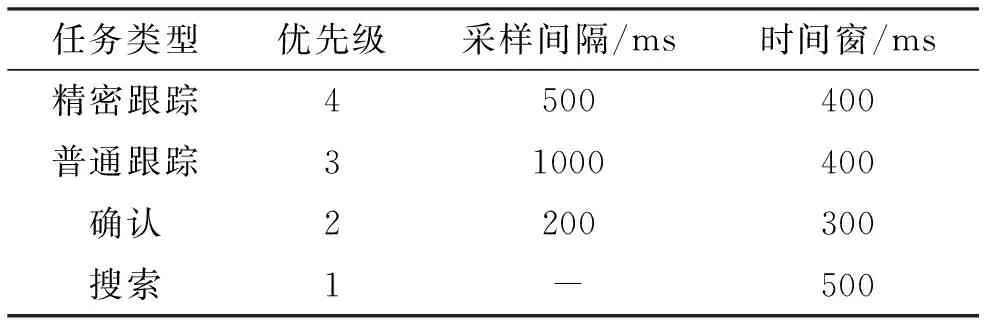
表1 任务参数设置

图6 仿真流程图

图7 仿真时序图
3.2 仿真一
本次仿真设置5个目标,目标初始位置(方位°,俯仰°,距离m)分别为位于(10,0,16380),(0,0,7500),(10,0,17640),(20,0,15630),(0,10,16920)。设置300个仿真间隔。仿真结果如图8至图11所示,图8为对5个目标跟踪所建立的航迹;图9显示了目标1的航迹,真实轨迹和检测点;从图8可以看出雷达成功对5个目标跟踪建航。目标检测和滤波RMS如表所示。仿真数据显示共创建309个任务,成功执行309个任务,任务调度成功率为100%。任务执行类型随仿真时间变化如图10所示,图11为搜索任务与跟踪任务占比随仿真时间变化关系,从图11中可看出,当稳定对这5个目标跟踪时,雷达将40%的资源用于搜索任务,将60%的资源用于跟踪任务。

图8 目标航迹

图9 目标1航迹、真实轨迹、检测点对比

图10 任务执行类型随仿真时间变化

图11 任务占比随仿真时间变化

表2 仿真一数据
3.3 仿真二
本次仿真设置100个目标,设置300个仿真间隔。仿真结果如图12至图16所示,图12为中显示了100个目标的运动轨迹;图13为16个成功跟踪建航目标的航迹;图14位任务执行类型随仿真时间变化图;图15任务占比随仿真时间变化。本次仿真雷达成功对100个目标中的16个目标成功跟踪建航,16个目标检测与跟踪均方根误差数据如图16所示。在整个仿真过程共创建574个任务,成功执行492个任务,丢失任务82个,任务调度成功率为85.7%。从图14和图15可以看出,雷达资源几乎全被跟踪任务占据。
图12 100个目标轨迹图

图13 目标航迹图

图14 任务执行类型随仿真时间变化
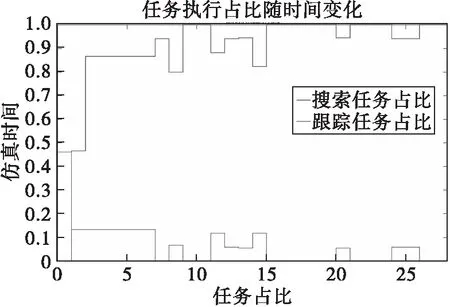
图15 任务占比随仿真时间变化

图16 仿真二数据
4 结束语
本文介绍了雷达自适应资源调度算法和雷达数据处理算法,包括任务综合优先级计算、点迹凝聚、航迹起始、航迹管理等方面内容。本文通过Matlab/Simulink搭建仿真平台将雷达回波模拟、信号处理与介绍的调度算法和数据处理算法联合仿真分析,并详细介绍了仿真流程。最后通过设立两种仿真场景分别仿真分析,仿真结果表明本文仿真方法可对雷达资源调度成功率等性能、跟踪滤波算法性能、检测性能进行评估,帮助雷达论证。
