道路虚线与实线间过渡标线长度影响因素分析*
2022-04-26齐亚妮
齐亚妮 杨 轸
(1.同济大学道路与交通工程教育部重点实验室 上海 201804; 2.新疆大学建筑工程学院 乌鲁木齐 830046)
换道是驾驶人行车过程中最基本的驾驶行为之一,换道车辆会对平稳的交通流造成扰动,尤其对目标车道的交通流产生较大的负面作用[1],目标车道的后随车辆为避免碰撞,须制动减速,由原来较为平稳车速的行驶状态,转变为波动状态,导致道路通行能力下降,甚至交通拥堵[2]。
目前国内外关于视距受限的驾驶人获取前方道路通行权力信息的问题尚无针对性的研究。但辅助驾驶领域开展的一些研究技术可以借鉴,如道路交通标线检测识别技术[3-5],作为自动驾驶领域的基础技术,服务于车道保持、车道偏离安全预警系统,主要是基于机器视觉[6],对车辆轨迹进行采集[7],利用路侧及车载智能设备实现环境感知和信息交互,这项技术可以为视距受限的驾驶人提供前方道路标线的信息。但这需要借助于较为复杂的车载及路侧智能感知、通讯设备,以及车路协同技术。以目前道路基础设施服务水平,技术成熟度不足,实施和推广需要一个较长的周期和较高的经济成本。
为了解决驾驶人因视线受限而造成的换道过程中压实线的问题,本研究从道路交通标线着手,提出一种新的解决方法:在道路原有白色虚线与白色实线标线之间增设一段虚-实线过渡标线。将过渡标线作为信息载体,提醒驾驶人,前方道路标线即将由虚线变为实线,便于其选择合适时机进行换道操作。
过渡标线的设置,必须保证驾驶人只要在过渡标线起点前开始准备换道,即可顺利完成换道操作(不压实线),所以过渡标线的长度如何确定非常重要。故本研究将重点探索分析过渡标线长度的影响因素。
1 过渡标线长度定义
1.1 过渡标线的位置
过渡标线的具体位置见图1,设置在道路原有白色虚线与白色实线标线之间,其终点与原有道路的实线起点相接,过渡标线起点根据其长度倒推,并与道路虚线相接。

图1 过渡标线的位置
1.2 过渡标线的长度
过渡标线的长度是要保证驾驶人在看到过渡标线起点时开始换道,并在实线起点前完成换道操作的长度。多数学者根据换道轨迹将换道过程分为3个阶段:准备阶段、执行阶段、调整阶段[8],其示意见图2。

图2 换道过程与过渡标线长度示意图
准备阶段AB。驾驶人在看到分流指示标志时,根据当前交通运行条件,做出换道决策并为换道做准备。此阶段车辆的外在行为特征与跟驰阶段没有太大的变化。
执行阶段BC。驾驶人开始调整车身行驶方向,跨越车道线,直至车身边缘初次跨越车道线,视为顺利完成车道切换任务。
调整阶段CD。车辆切换至目标车道后,驾驶人调整车身方向,使其与当前车道相匹配,调整阶段结束。
为了便于理解过渡标线的长度,对照图2:其中A点即驾驶人产生换道意图时刻(看到过渡标线起点时刻)的位置。DL、DR为驾驶人的左右视距,而驾驶人视距被前方大车遮挡,受与前车车距的影响。驾驶人左右视距计算简图见图3。

图3 视距计算简图

式中:DL、DR分别为驾驶人的左、右视距,m;LL、LR分别为驾驶人视点距离左、右车道线的距离,m;HL、HR分别为视点垂直投影点距车身左右边缘的距离,m;d为前车车尾与后车车头间距,m。
考虑极限状态下,若前方大车车身宽度H接近于车道宽度W,或前导车车辆向左或者右偏,则驾驶人的视距DL或DR近似于等于车距d。
2 实验场景设计与数据采集
过渡标线的长度可能受到车道宽度、车距,以及车速的影响。相较于实车实验,驾驶模拟器具有重复性好、场景再现容易、成本低等优点,故本研究主要通过驾驶模拟实验探索过渡标线长度的影响因素。
2.1 实验场景设计
1) 道路基本场景。道路横断面为双向六车道,车道宽度为W,全长为6 km直线路段公路,道路标线由白色虚线、过渡标线和实线组成。
2) 交通环境。实验场景中侧向无环境车辆干扰,测试车辆前方设置了1辆车身宽度与车道宽度相近的前导车,前导车的横向位置一直保持在测试车所在车道正中央行驶,用以遮挡驾驶人的视线。使用驾驶模拟软件中行为模型函数锁定测试车与前导车车距d,使其始终与测试车保持固定车距d行驶。
3) 参数设置。为了研究车道宽度及车距对过渡标线长度的影响,设定车道宽度4级水平,W=3.0,3.25,3.5,3.75 m,车距7级水平,d=15,25,35,45,55,65,75 m。为了避免驾驶人在驾驶场景中,驾驶操作固化,在实验场景中,车距d根据选定数值随机变化。
4) 驾驶任务。提前告知驾驶人过渡标线的意义,将过渡标线的起点视为换道提醒信号。要求驾驶人员开始保持在当前车道行驶,一旦看到换道信号,即可准备换道操作,换道至相邻车道,后保持当前车道行驶,直至再次看到换道信号,换道至相邻车道,如此往复,驾驶人车速控制在60~120 km/h。驾驶模拟实验招募的驾驶人,男、女比例7∶3,平均年龄32岁,标准差4.9,平均驾龄7年,标准差为2.5。
2.2 数据采集
采集的数据主要有车速、车距、行驶距离、车辆偏航角、车身边缘与道路标线间的横向距离,数据采集频率为20 Hz。车辆偏航角(psi)是指车身方向与车辆前进方向的夹角。车身边缘与道路标线间的横向距离(lanegapleft , lanegapright)是指车身左(右)侧边缘与当前车道左(右)侧车道线间的距离,其参数示意见图4。

图4 参数示意图
车辆在跟驰阶段,3个参数psi,lanegapleft,lanegapright会小幅波动,而在换道过程中会有较大的变化。
图5展示了1次向右换道过程中psi的变化。偏航角psi负值表示向左偏,正值表示向右偏。车辆在跟驰时,psi较为稳定或小幅波动,在换道执行阶段开始时,psi开始连续增大,增大到极值,psi回调,完成换道后再小幅波动跟驰行驶。图6展示了1次向右换道过程中2个参数lanegapleft、lanegapright的变化。车辆在跟驰阶段,2个参数lanegapleft、lanegapright较为稳定或小幅波动。车辆向右换道过程中,如图6中极值点所示,是车辆重心跨越车道线时刻,而后lanegapleft开始增大,当lanegapleft增大为0时,表示车身左侧边缘与左车道线的间距为0,表示车身已完全切换到目标车道,视为向右换道执行阶段结束,如图6中零点所示。根据提取的换道执行阶段结束点的位置与换道信号位置之差,即为过渡标线的长度。

图5 换道过程中psi的变化

图6 换道过程中参数lanegapright/lanegapleft的变化
3 过渡标线长度的影响分析
3.1 模型自变量筛选
采用逐步回归法探索各自变量对过渡标线长度的影响,此法选择变量是以赤池信息准则(Akaike’s information criterion, AIC)为选择标准,AIC值越小,表示拟合的模型精度越高越简洁[9]。
为了减少试验工作量,采用控制变量法,进行实验。首先探索车道宽度W和车速V对过渡标线长度的影响。限定车距d为75 m,车道宽度W为3.0,3.25,3.5,3.75 m。逐步回归,结果见表1。由表1逐步回归结果来看,选择全部自变量W和V时AIC=965.2。剔除变量W后,模型的AIC会减小,AIC=960.7,去掉变量V后,模型的AIC会增大,AIC=1 054.1。说明剔除变量车道宽度W后的模型是最优模型。

表1 过渡标线长度L0~车道宽度W+车速V逐步回归结果(AIC=965.2)
由上述结果已知,车道宽度W不是影响过渡标线长度的关键变量,限定车道宽度W为3.5 m,车距d为15,25,35,45,55,65,75 m,探究车距d和车速V对过渡标线长度的影响。逐步回归结果见表2。

表2 过渡标线长度L0~车距d+车速V逐步回归结果(AIC=2 893.5)
由表2可见,采用全部自变量V和d回归时,AIC=2 893.5,无论剔除V或d,均会使AIC增大,所以2个自变量V和d对因变量L0都有显著影响。
3.2 回归模型评价
对上述结果进一步拟合得到回归模型,见表3。
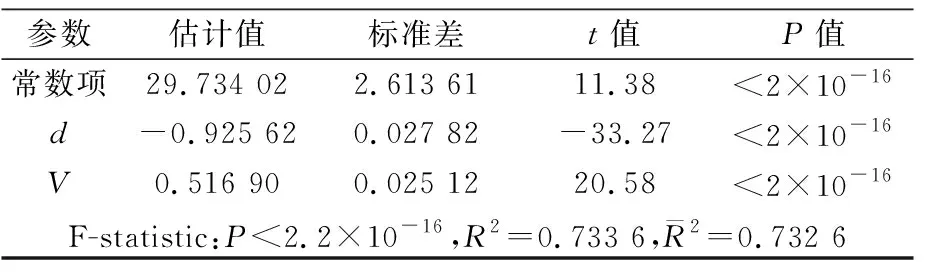
表3 过渡标线长度L0 ~车距d+车速V回归方程及显著性检验结果

3.3 自变量的相对重要程度


表4 标准化回归系数及标准化回归方程
3.4 回归模型的诊断
由于线性回归模型有若干的前提假设条件,如残差正态性、线性关系、同方差、非共线性等。对回归模型的诊断,主要是对上述各项假定的检验。绘制模型诊断图,见图7~图10。
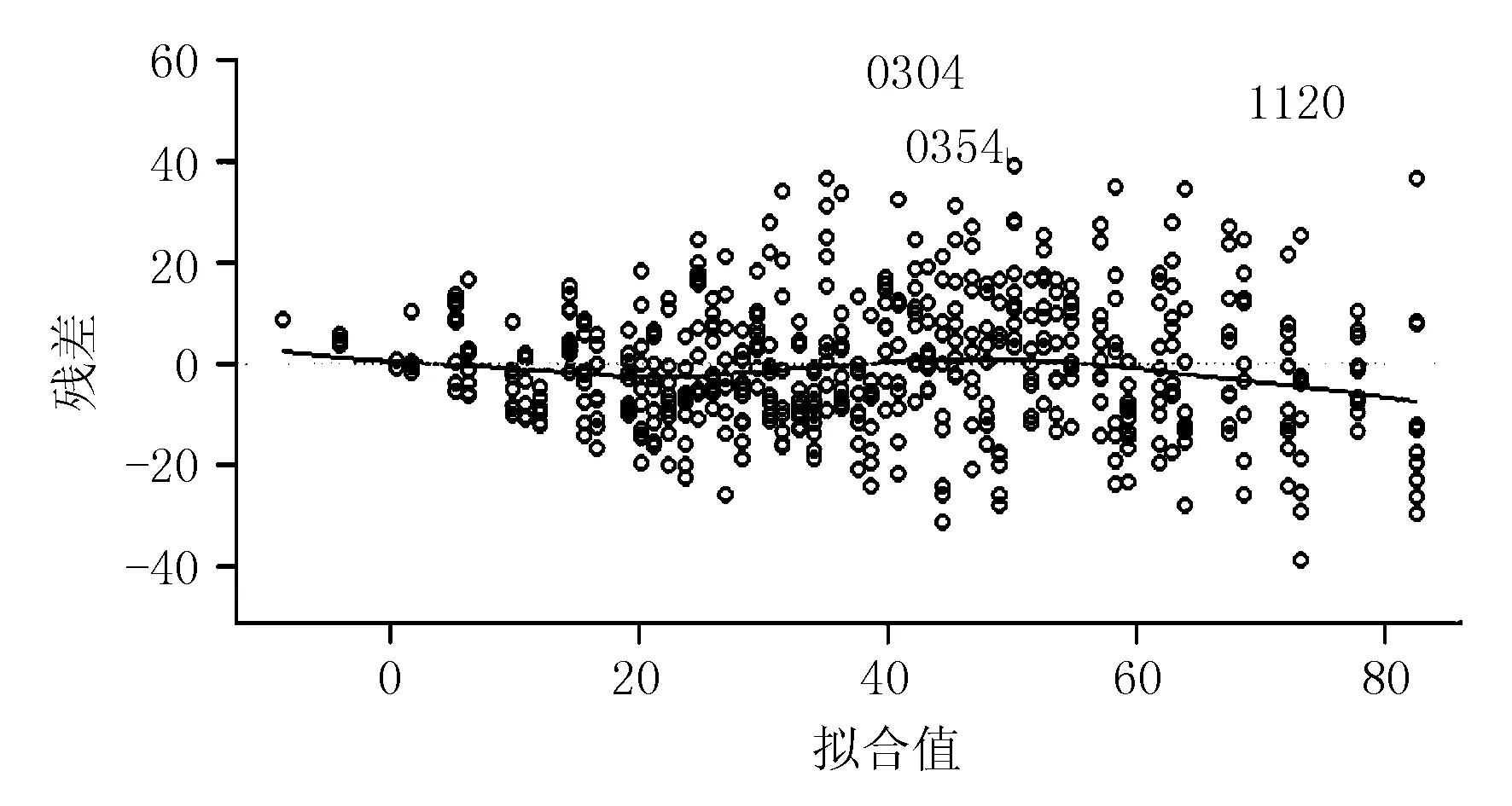
图7 线性关系检验——残差图

图8 残差正态性检验——标准化残差正态Q-Q图

图9 同方差检验——标准化残差图

图10 强影响点检验——Cook距离
1) 线性关系检验。由图7可见,图中横坐标是模型的拟合值,纵坐标是预测残差,可以看出,拟合值和残差的散点随机分布,而且其离散程度基本一样,表示其满足方差齐性的假定,并且拟合值与残差值的观测点在一条水平线附近波动,红线与水平线比较接近,且没有明显的趋势,说明自变量与因变量之间的线性关系假定成立。
2) 残差正态性检验,图8为标准化残差的正态Q-Q图,各个点基本在直线周边分布,没有显著趋势,可以认为正态性假定基本成立。
3) 同方差假设检验。图9为标准化残差图,由图9可见,x轴是回归模型的预测值,y轴是标准化残差绝对值开方,散点图中实线没有特别明显的趋势,可以认为是满足同方差假设。
4) 强影响点检验。图10中标注了Cook距离最大的3个点,但其最大的Cook距离也小于0.5,可以认为没有强影响点。
过渡标线长度等于换道准备阶段与执行阶段的总长度减去视距,而车距会影响驾驶人的视距,车速影响换道执行阶段的长度,故车距和车速是影响过渡标线长度的关键变量[10]。而车道宽度会影响驾驶人的路侧视觉感觉,直接影响驾驶人的车速,进而影响换道执行阶段的长度。而车道宽度又在一定程度上影响驾驶人的视距长度,鉴于车道宽度3.0~3.75 m之间的差距并不大,对车速和视距的影响较小,进而对过渡标线长度的间接影响此消彼长,影响不再显著。
4 结论
本文针对道路行车过程中,驾驶人因视距受限导致换道过程中压实线违章的现实问题,从道路交通标线着手,提出设置过渡标线的方案。结合驾驶人换道过程中车辆的行为特征,给出了过渡标线长度的定义。并通过驾驶模拟实验,研究了过渡标线长度的影响因素,初步建立了过渡标线长度的线性回归模型,并对回归模型进行了检验。研究发现,车距与车速是影响过渡标线长度的关键变量,而车道宽度对过渡标线的长度无显著影响。回归模型中,自变量车距相对重要性高于自变量车速,且过渡标线长度与车距为负相关,与车速正相关。回归模型可为过渡标线长度的设置提供参考。
过渡标线作为信息载体,提醒驾驶人前方道路标线即将由虚线变为实线,便于其选择合适时机进行换道操作,引导其有秩序地使用道路,理论上应能避免司机因视距受限而产生换道压线违章情况,进而促进道路交通安全,提高道路运行效率。而过渡标线作为一种区别于现有标线的新标线,驾驶人对其辨识结果有待进行研究,因此,下一步需要对过渡标线的形式进行深入分析,并对其有效性进行评估验证。
