一种基于激光雷达的机器人自主充电方法
2022-04-26刘甲宾
刘甲宾
(1.北京全路通信信号研究设计院集团有限公司,北京 100070;2.北京市高速铁路运行控制系统工程技术研究中心,北京 100070)
2015年国务院颁布《中国制造2025》,将机器人和先进轨道交通装备均列为我国智能制造强国战略的10大重点领域[1]。2020年8月中国国家铁路集团有限公司出台《新时代交通强国铁路先行规划纲要》,纲要明确,到2035年,全国铁路网运营里程达到20万km左右,其中高铁7万km左右[2]。
随着我国铁路里程数的不断增长、列车运行速度的不断提高[3-4],以及信号技术的不断进步,无人值守车站和中继站的数量随之大量增加。现有信号集中监测设备偏重于设备技术参数的采集和分析,缺少现场实时、准确的监测巡视手段[5],依靠人工监测会造成明显的成本增高、且巡视维护困难、时效性差。大量利用可靠和安全的智能化移动机器人代替人工巡检将成为趋势[6]。
移动机器人由自身携带的电池供电,在电池电量不足时,需要连接电源充电。因此,自主充电是移动机器人的必备技术。
激光导航定位是当前移动机器人导航定位的重要方式。但激光导航定位技术的定位精确度无法确保充电成功。当前移动机器人自主充电技术主要由装置或轨道导入、红外阵列引导和激光扫描环境特征[8-10]等。这些技术需要额外部件、技术支持,或需要测绘周围环境参数支持。
本文介绍一种带特征结构的充电装置和基于特征数据锁定该装置的方法,使用该装置和锁定方法可以协助移动机器人完成自主充电。
1 结构与位姿
1.1 结构
1.1.1 机器人结构
机器人上安装激光雷达、储能电池系统、运动控制系统、无线通信设备和无线充电器受电端,如图1所示。

图1 机器人结构Fig.1 Robot structure
激光雷达为单线雷达,水平安装。激光雷达周期性扫描周边一个平面,从起始角到终止角,以角分辨率递增扫描,每周期返回一帧数据。每帧数据包含平面内每个被扫描点的距离值,该距离值为障碍物到雷达中心的距离。每帧数据中距离值的顺序与扫描顺序相同,因此可以根据点序号确定这条激光线束的角度。点序号确定的角度是以激光中心轴为原点、以初始扫描位置为0°的极坐标系中的角度。
储能电池系统包括储能电池和状态反馈模块,状态反馈模块的反馈信息包括剩余电量和充放电状态。
运动控制系统用于调整机器人的位姿,调整包括左右旋转和前后移动。
无线通信设备用于与充电装置通信。
无线充电器受电端用于接收充电装置输电端的电能输入,是机器人充电功能的输入接口,如图1所示。为达到高效充电目的,无线充电机受电端和输电端的错位应不大于2 cm,距离不大于1 cm。
1.1.2 充电装置结构
充电装置包括充电桩和充电控制设备。充电桩包括无线充电器输电端、特征结构和电源转换模块;充电控制设备包括控制模块和无线通信模块,如图2所示。

图2 充电装置Fig.2 Charging device
无线充电器输电端用于向机器人的无线充电器受电端输出电能,是充电桩充电功能的输出接口。
特征结构采用横向长条形平面,中部设置两个凸起作为特征标记。特征结构水平安装,表面采用光滑处理,颜色宜采用浅色。
电源转换模块用于将工频AC220 V转换为机器人储能电池充电所需的DC48 V,且保证输出功率。
控制模块用于监控充电功能的开启和关闭。
无线通信设备用于与机器人通信。
1.1.3 机器人结构与充电桩结构的关系
机器人受电端安装在机器人正前方,与充电桩输电端同高。
激光雷达安装在机器人正前上方,扫描平面与充电装置特征结构横向中线同高。
1.2 位姿表示
机器人坐标系采用右手坐标系,如图3所示。正面是x轴的正方向,左边是y轴的正方向,上方是z轴的正方向。
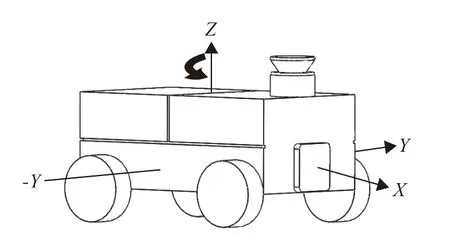
图3 机器人位姿坐标系Fig.3 Coordinate system of the pose of the robot
在充电装置输电端正前方距离D处设置充电原点,设机器人正常充电的位姿为(x0,y0,θ0),则在充电原点调整的目标位姿为(x0-D,y0,θ0)。
2 自主充电方法与偏差计算
2.1 自主充电方法
机器人通过储能电池状态反馈模块检测电池剩余电量;当检测到电池剩余电量低于返航充电阈值时,机器人中断当前任务,记录中断点,返回充电原点。
机器人到达充电原点后,切换到充电位姿调整模式。该模式下,机器人首先根据特征结构锁定充电装置,计算位姿偏差,然后根据计算结果调整机器人位姿。位姿调整完成后,控制机器人前进距离D,然后发送充电请求,并根据反馈信息判断是否满足充电条件:若不满足充电条件,则控制机器人后退固定距离D,重复充电原点位姿调整;若满足充电条件,则等待充电完成。
充电完成后机器人发送停止充电请求,后退距离D到充电原点。然后切换到自动任务模式,返回中断点,继续执行未完成任务。
2.2 偏差计算
激光雷达与特征结构的几何关系如图4所示。B为激光雷达,DE为特征结构,A为特征1、C为特征2。激光雷达扫描到的特征1距离为BA(c),光束序号I1;特征2距离BC(a),光束序号I2;激光雷达角分辨率为f,BF为机器人正前方光束,序号I3。

图4 几何关系Fig.4 Geometric diagram of laser beams and the feature structure
2.2.1 锁定充电装置
根据特征数据识别特征1和特征2,计算两个特征之间的距离b。

联合公式(1)、(2)可得:

计算所得长度b与实际两特征距离X1对比,在阈值范围内,即X1-E2<b<X1+E2(其中E2是误差阈值),则锁定无线充电装置位置成功。
2.2.2 位姿偏差计算
根据扫描数据计算机器人当前位姿与充电原点的目标位姿(x0-D,y0,θ0)的偏差Δx、Δy、Δθ。其中,Δx为x方向偏差, Δy为y方向偏差,Δθ为姿态角偏差。
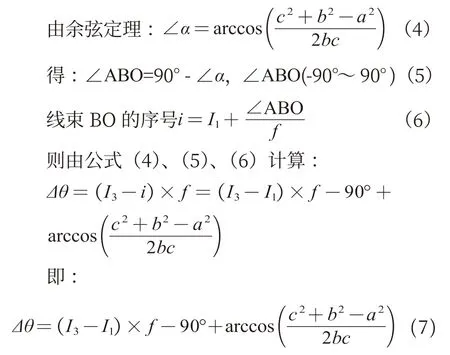
1)计算Δθ
根据雷达B到已知线段两端AC距离,计算雷达B与线段AC所在直线的垂线BO的线束序号,确定机器人姿态角偏差 。
2)计算Δx
根据激光雷达与特征机构平面的垂直距离计算Δx=h-D。


3)计算Δy
激光雷达中心与特征机构平面两个特征的中垂线的距离,即Δy:

其中,ΔABO=(I1-i)×f,ΔCBO=(I2-i)×f,i为计算所得垂直于线段AC所在直线的线束BO的序号,即∠ABO(-90°~90°),∠CBO (-90°~90°)。
3 效果验证
3.1 数据处理
为获取稳定的数据,机器人在静止状态收集激光雷达数据,且采用中值平均滤波处理。结果如图5所示。
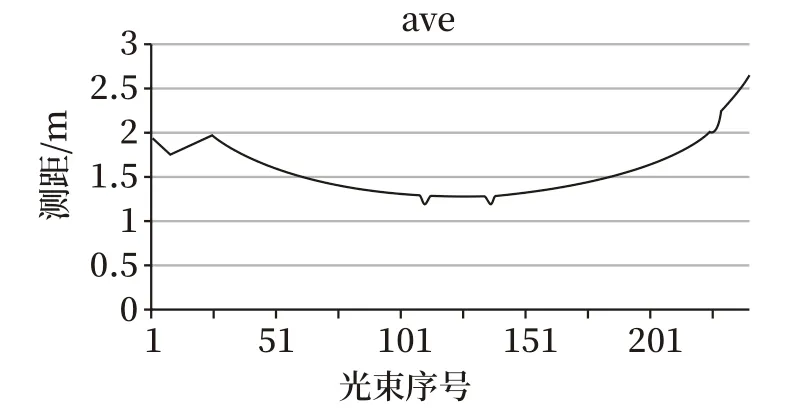
图5 特征扫描数据Fig.5 Scanned feature data
首先从数据中提取直线段,以每一段直线为一个处理单元。然后经过微分,特征累计放大,最后采用与顺序数据中值滤波差值的方法处理数据,有效直线段处理结果如图6所示。根据数据处理结果,可迅速锁定特征结构并计算偏差。

图6 数据处理结果Fig.6 Data processing results
3.2 充电测试
特征结构长度X取值100 cm,两个特征距离X1取值20 cm,特征宽度3 cm,高10 cm,进行测试。测试结果显示,取D为150 cm,特征距离偏差阈值E1(-2 cm~2 cm),角度偏差Δθ阈值E2(-0.2°~0.2°),Δx阈值E3(-0.5 cm~0.5 cm),Δy阈值E4(-0.5 cm~0.5 cm)。
经过测试,在Δθ(-25°~25°), Δx(-20 cm~20 cm),Δy(-20 cm~20 cm)范围内可确保完成充电。
4 结束语
随着国内铁路无人值守车站和中继站数量的大量增加,设置在车站和中继站的控制列车运行的关键设备数量将更庞大。依靠人工巡检需要众多高水平的专业技术维护人员,成本较高、维护困难且时效性差。利用先进的机器人技术实现无人值守站信号室在线安全巡检系统,节省人工的同时利于提高现场安全维护水平、降低事故率,对铁路行业智慧化、智能化的健康发展具有重要意义[13]。本文介绍的特征装置和计算方法,已经在信号室内巡检机器人上试用。试用结果表明,该结构和计算方法可确保机器人准确定位充电装置,并完成自主充电。
