一种教学用的低成本六轴机器人设计与研究
2022-04-20章家藏
章家藏
(浙江安防职业技术学院,浙江 温州 325016)
1 概述
工业机器人是一种可替换人工重复作业的多自由度机械手,具备了相应的自动化、可编程性、半自动化等功能,并可以利用自己的机械控制和动力能源完成不同功能, 如工业加工、装配、搬运等,因此被广泛应用于制造、物流、能源、化工、电子等各种领域中。目前工业机器人核心技术被国外的库卡、ABB、安川、发那科四大公司垄断,国内比较好的企业有新松机器人等。2022 年是《中国制造2025》实施的第8年,培养工业机器人相关技术人才是提高国家制造业创新能力的重要一环,因此在国内众多大专院校中均开设了工业机器人技术相关专业。目前试验或教学等相关的设备多大依赖进口,然而进口的设备存在诸如体积大、设备价格高、使用和维护成本高、安全系数低的缺点,且此类设备只能用于示教演示,学生静态观察学习,无法动手参与到实践当中。本文研制的基于Mini ESP8266 控制的舵机驱动教学用工业机器人,拥有设计和制造成本低、总体尺寸小、无安全隐患的优点,因此可在实训室批量配置,便于学生手动实践,能够较好地解决了进口大型设备的实验教学难题。该设备可在智能制造、计算机、自动化、机械电子等各类工科相关专业中推广使用[1]。
2 六轴教学用机器人的结构设计与分析
为降低成本,本文利用SolidWorks 建模,使用3D 打印机打印各类部件,并充分考虑模块化的设计思想,便于在批量化生产时实现零件的互通互换,从而降低设计、制造、维护成本。
2.1 机械手的结构设计
图1 所示教学用的六轴机器人整体结构设计方案,主要包括底座、转盘、固定支架,固定支架上铰接有大臂,大臂上铰接有小臂,小臂上铰接有腕部支架,腕部支架设有末端执行器支座,支座上设有末端执行器(手爪)。底座上安装有内舵机,内舵机的输出轴与转盘连接,固定支架上安装有第一舵机,第一舵机的输出轴与大臂连接,大臂上安装有第二舵机,第二舵机的输出轴与小臂连接,小臂上安装有第三舵机,第三舵机的输出轴与腕部支架连接,腕部支架上安装有第四舵机,第四舵机的输出轴与支座连接,支座上安装有第五舵机,第五舵机的输出轴与第一爪子齿轮连接。整体结构简单,操作方便,利于在教学过程中进行展示。

图1 教学用的六轴机器人整体结构设计
末端执行器:
图2 所示,机械臂的末端执行器(夹爪)是由两个带有半齿轮的手爪组成,左边为驱动手爪,连接舵机驱动轴;右边为从动手爪,自由安装在转轴上。舵机旋转时带动左手爪转动,通过啮合的齿轮,实现手爪的开合抓取。

图2 末端执行器(左)大臂/小臂结构(右)
大臂/小臂:
大臂与/臂的零件相同,可以互通互换。若需提高该机器人的工作范围,可继续铰接该部件,提升机械臂的灵活性。
2.2 有限元分析
机器人结构在设计初期无法考虑到实际工作过程中需要的刚度特性、机械强度,一般优先考虑材料、设计尺寸、外部轮廓等参数,所以设计最后需针对结构大小臂做有限元分析,验证机械臂在负载受力情况下刚度和强度能否满足日常教学研究使用条件,在此基础来确定是否要对其结果做出针对性优化[2]。
大、小臂是结构中通用且受力较大、容易变形的部件,因此本文仅对大小臂做力学分析。首先将SolidWorks 三维建模软件中已建好的三维结构导出成STEP 格式,将STEP格式的结构模型导入到hypermesh 静力学仿真软件中,尺寸单位选择mm,其材料选择为用于快速成型(3D 打印)的ABS 材质,收缩率为0.65%左右,材料密度为1g/cm3左右,拉伸强度为63MPa,泊松比为0.394,邵氏硬度为92 度,弹性模量约为2000MPa[2]。在软件中设置好以上材料性能参数后,使用四面体作为单元划分类型,指定网格尺寸为1mm,网格划分最终结果如图3 所示。

图3 结构的网格图
完成上述步骤后,增加约束和载荷。结构部件上端铰接有其他部件,可视为负载,将其设定为固定端,部件下端连接有作为驱动的舵机,对下部分施加扭矩。为了便于分析,设定施加的总扭矩为50N·m,采用optistruct 软件仿真分析,得到该部件的应力如图4 所示。

图4 结构的应力分析图
从应力分析图来看,该部件的最大应力出现在部件和驱动舵机连接处,大小为0.4453MPa,可知该值远低于ABS材料的许用应力值,故结构设计满足工作要求,不会影响六轴机器人性能和其他工作部件,无需对其做特殊优化或做加大尺寸处理。
3 六轴教学用机器人控制系统设计
为降低产品成本,除结构优化及采用快速成型的加工方式外,在硬件选择上尽可能选用性价比高的零件,故采用了TS90A型号的舵机驱动、ESP8266 型号的模块控制。
3.1 TS90A舵机
本文采用舵机(伺服马达)作为机器人基本执行结构,型号为TS90A、堵转扭矩:16-18N·cm(4.8V)、可控制角度0~180 度、工作电压:4.8V-6V,该舵机的优势是控制简单,价格低。

图5 舵机实物图
对本文的六轴机器人而言,需六个舵机协同工作。通过控制模块发送有效的PWM拓展模块信号,如图6 所示的工作原理图先输出控制脉冲到控制电路,由此来控制马达,马达带动减速齿轮组,反馈到比例电位器,通过比例电压形成闭环控制。TS90A舵机的组成包括控制电路板、位置反馈检测器、电机、限位开关等[3]。

图6 TS90A舵机的工作原理
TS90A 舵机的控制需输入一个约为20 毫秒的时基脉冲,该脉冲的高电平为500 微秒~2500 微秒的角度控制脉冲。如表1 所示,180 度角度伺服对应的控制关系。
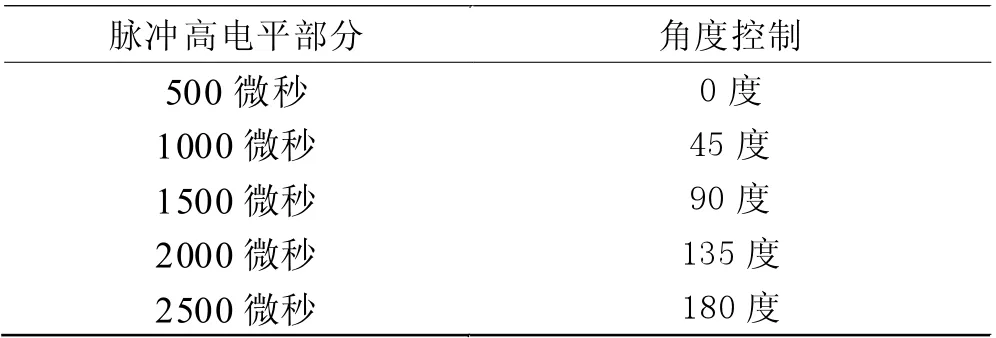
表1 脉冲与角度对应表
3.2 ESP8266 控制模块
ESP8266 是一种高度集成的Wi-Fi MCU(微控制单元),广泛应用在物联网中。该模块集成了Wi-Fi 天线、片上SRAM和32-bit 处理器。ESP8266 能通过GPIO 口集成传感器和其他设备,另外片内还集成了天线开关、低噪声接收放大器、滤波器等,开发成本低,性价比高。因此选用了ESP8266 控制六轴机器人的舵机,能够较好实现所需功能,利于学生的二次开发学习。图7 所示为ESP8266 控制模块原理图[4]。

图7 ESP8266 控制模块原理图
因本文中的六轴机器人仅需舵机控制,出于降低成本的考虑,最终选用了ESP8266 的mini 版本,即mini ESP8266 模块。选用此版本在不降低产品性能的前提下,进一步降低了成本,同时保留了wifi 功能。(图8)
Mini ESP8266 有D0 到D8 共9 个数字接口,最多可以连接控制9 个舵机,本文只需用到6 台舵机,故任意选用其中6 个接口即可。每台舵机都有灰橙红三根连接接口,其中红色连接线连接控制板的5V口,灰色连接线连接G 口(由于控制模块只有一个5V接口和一个G 接口,无法同时给6 个舵机同时供电,故需借助杜邦线和面包板扩充给多个舵机供电)。舵机的控制线(橙色线)各自连接到控制板D0-D8 中的任意接口,从而实现对舵机的单独控制。
Mini ESP8266 有三种编程方式:第一种是使用AT指令进行操作。这种方式无需编程,可与单片机配合使用,也可以在PC端安装调试软件使用。第二种是LUA语言编程,这种方式不需要依靠串口调试软件与单片机。第三种方式是采用Arduino 开发环境编程,本文采用了此类方式,在PC端使用Arduino开发方式进行开发。
3.3 控制系统程序的设计
本文用 C 语言在Arduino ide 环境中编写程序,首先使用命令#include<Servo.h>调用Arduino 伺服舵机库文件,使用Servo servo命令创建舵机对象(第二servo 是指舵机名称,可任意编写)。使用命令servo.attach(int pin,[int min],[int max])来选择舵机控制参数,其中int pin用于选择舵机,如填写D0 即控制接了D0 口的舵机,[int min],[int max] 分别表示最小角度,最大角度。使用servo.write(int value)命令来控制舵机旋转的角度,如果输入的值为大于300,则视为脉冲宽度(微秒)。使用servo.writeMicroseconds(int value)命令以微秒为单位写入脉冲宽度。使用servo.detach()命令使舵机与其针脚分离,该针脚可继续被用作PWM接口。
控制舵机转动的原理是,给舵机一个特定PWM信号,舵机会转到相应角度。以微秒级高电平再转为低电平信号来控制舵机转到指定角度,舵机要持续发信号直到目标角度,通常响应500 微秒到2500 微秒间的值,其中1000 为逆时针方向,2000 为顺时针方向,1500 在中间位置。具体对应参数可参考表1 中的脉冲与角度对应表。
Mini ESP8266 控制板带有wifi 模块,本文的机器人还可以通过wifi 连接PC,通过编写简单的网页按钮,利用网页控制机械手的运行如图9 所示。

图9 网页控制六轴机器人界面与实物图
4 结论
本文设计是一款基于Mini ESP8266 的3D打印教学用的低成本六轴机器人。介绍了机器人的结构设计与分析,舵机控制等。为降低成本,本文在结构设计、硬件材料的选择等做了优化。采用本机器人教学可以培养学生的3D 建模能力、程序编写能力。对工业机器人专业的学生而言,熟悉工业机器人在关节坐标系下的运动方式和控制方式是非常重要的,能使学生有具体和形象的接触理解。本文的设计已申请相关专利。
