考虑状态获取的主动前轮转向与主动横向稳定杆多目标集成控制
2022-04-19邱香吴新宇陈正科吴晓建
邱香,吴新宇,陈正科,吴晓建
(1.江西科技学院 协同创新中心,南昌 330098;2.南昌大学 机电工程学院,南昌 330031)
车辆侧翻、横摆失稳等交通事故危害大、伤亡率高,改善车辆的侧倾与侧向稳定性,提升车辆主动安全性,成为ADAS、乃至智能驾驶的重要研究工作。值得注意的是,剧烈的横摆运动易使车辆发生非绊倒侧翻,而侧倾后的内外侧车轮载荷转移可能产生过多转向效应,由此导致侧向动力学与侧倾动力学呈现复杂的耦合影响。此时,将单个子系统独立最优控制进行简单的叠加已经难以达到最优的综合性能,有必要对车辆抗侧翻与操稳性进行集成控制以协调子系统之间的相容与冲突问题,最大化挖掘子系统功能潜力。
目前,主动前轮转向(Active front steering, AFS)和主动横向稳定杆(Active anti-roll bar, AAB)常分别用于车辆操稳性控制和抗侧翻控制。在AFS操稳性控制方面,周兵等[1]考虑轮胎的非线性特性及路面附着系数对轮胎力的约束,采用滑模控制算法为AFS系统设计了操稳性控制器,且对控制算法中的状态量及路面附着系数进行实时估计,在“轮胎-路面”附着能力范围内检验了AFS控制系统的有效性。李绍松等[2]利用轮胎的非线性特性,提出一种改进型线性时变模型预测控制方法以扩展主动前轮转向汽车的稳定范围,从而提高极限工况下主动前轮转向汽车的稳定性。考虑AFS操稳性辅助控制与驾驶员控制的协调需求,Wu等[3]为AFS系统提出了操稳性控制介入时机及相应判断准则,仅需获取当前路面附着系数、车速及车轮转角,即可快速判断AFS是否必要介入;同时,采用相平面法,为操稳性的质心侧偏角及横摆角速度多目标控制提出了协调机制,提升了AFS系统在高速低附着路面等极端情况下的操稳性。Zhou等[4]基于文献[3]提出的AFS操稳性辅助控制介入时机,设计了滑模控制器,通过急救车实车测试,验证了控制算法的有效性。
在主动横向稳定杆抗侧翻控制方面,陈松等[5-6]提出了通过差动制动与主动横向稳定杆联合对车辆进行侧翻控制的策略:通过差动制动控制减小车辆的横摆运动以防止车辆由于横摆失稳产生非绊倒侧翻;通过2阶滑模超螺旋控制算法为主动横向稳定杆设计了动态跟踪车辆理想侧倾角的控制系统,进一步提高车辆的防侧翻能力;采用硬件在环试验对提出的差动制动与主动横向稳定杆联合控制策略进行了有效性验证。郭存涵等[7]为主动横向稳定杆抗侧倾控制设计了滑模变结构控制器,且在控制器滑模面定义过程中引入了分数阶微积分理论、利用模糊规则对切换增益参数进行自适应调整,以减小滑模面切换时的抖振现象;通过Carsim- Simulink联合仿真,验证了该算法可在有效抑制抖振现象的条件下实现汽车侧倾姿态的控制。文献[8-10]设计了主动横向稳定杆抗侧翻控制器,同时采用模糊控制策略协调主动横向稳定杆在前后轴上的侧倾力矩分配,以进一步改善车辆的操稳性。周兵等[11]建立了含主动横向稳定杆、AFS的整车动力学模型,分别设计了主动横向稳定杆抗侧倾算法、AFS操稳性控制算法,以及前后主动防侧倾力矩分配模糊PID协调控制器,实现转向时的侧倾与横摆稳定性协调控制。
以上文献的研究工作中,抗侧翻与操稳性集成控制大多忽略了控制算法在面向应用时的状态量获取问题,或默认算法中涉及的状态量为已知,或简单考虑操稳性状态估计,很少开展路面不平度激励、非线性轮胎等复杂因素共同作用下的垂向状态量与侧向状态量联合估计。基于以上,本文考虑抗侧翻过程中侧倾力矩在前后轴上的分配对操稳性控制的影响,且为控制器涉及的状态量设计估计系统,实现可面向应用的抗侧翻与操稳性的集成控制。
1 总体思路
本文进行AFS与主动横向稳定杆集成控制系统的工作流程可总结为图1所示。惯性测量单元(Inertial measurement unit, IMU)及线性位移(Linear variable differential transformer,LVDT)传感器实时采集车辆侧向加速度、横摆角速度、侧倾角速度、悬架动挠度等数据,由状态估计系统完成质心侧偏角、车身侧倾角、轮胎侧向力等关键状态信息的估计,再经AFS操稳性滑模控制器、主动横向稳定杆抗侧倾滑模控制器及PID协调控制器得到动态侧倾力矩Mf、Mr,以及叠加车轮转角Δδf,实现多目标的集成控制。

图1 控制系统工作流程
2 主动横向稳定杆、主动前轮转向动力学建模
建立如图2所示的垂向7自由度动力学模型及整车侧向、横摆操稳性动力学模型。

图2 整车动力学模型
考虑路面不平度激励、转向过程中的内外侧车轮载荷转移以及“垂向力-侧向力”耦合作用的轮胎非线性特性,相应动力学方程如式(1)~式(9)所示。
整车侧向运动为

整车横摆运动为

车身侧倾运动为

车身质量垂向运动为

车身俯仰运动为

非簧载质量垂向运动为:

轮胎载荷为:

车轮侧偏角为:
各悬架簧上质量位移满足:

式中:Fi为悬架作用力,Fi=ki(xsi−xui)+ci(xsi′−xui′),i=fl,fr,rl,rr;ki和ci分别为各悬架位置弹簧刚度及减振器阻尼系数;F0i为车轮动载荷,F0i=kti(xui−x0i),kti为轮胎垂向刚度;Fyi为车轮侧向力,可根据轮胎模型,由车轮载荷Fzi和轮胎侧偏角 αi共同确定;r为车辆横摆角速度;xc为簧上质量质心垂向位移;θ为车身侧倾角;φ为车身俯仰角;vx和vy分别为车辆纵向和侧向速度;xsi、xui分别为各悬架位置簧上集中质量与簧下质量位移;x0i为路面不平度激励;δ为驾驶员通过转向系统输入产生的车轮转角; Δ δf为主动前轮转向系统的转向电机叠加输入产生的附加车轮转角;Mf和Mr分别为前后轴上主动横向稳定杆施加的侧倾力矩;m、ms和mui分别为整车质量、簧上质量,各悬架位置簧下质量;a和b分别为质心至前轴和后轴的距离;bs为轮距;h为簧上质量质心至侧倾轴线距离;Ir、Iθ和Iφ分别为整车横摆转动惯量、车身侧倾转动惯量及车身俯仰转动惯量。
因轮胎垂向载荷与侧向力相互耦合,采用Magic Formula轮胎模型加以体现[12],即

式中:α为轮胎侧偏角;B为刚度因子;C为形状因子;D为峰值因子;E为曲率因子。B、D、E均与车轮载荷相关,表达式为:

可得轮胎侧偏角-载荷-侧向力曲面如图3所示。

图3 轮胎侧偏角-载荷-侧向力曲面
3 采用 UKF 的车辆关键状态观测系统
本文进行主动横向稳定杆与主动前轮转向集成控制。其中,主动横向稳定杆通过动态施加侧倾力矩,按需调整车身侧倾姿态;主动前轮转向通过叠加车轮转角提高车辆横摆稳定性。显然,侧倾力矩值的计算与悬架力、车身侧倾角等状态相关。主动前轮转向进行车辆稳定性控制时,则需要实时获取车辆质心侧偏角、轮胎侧向力及轮胎侧偏角等关键信息。GPS/INS组合导航和轮胎六分力仪虽可以对以上大部分参量进行直接测量,但成本昂贵,仅限于试验测试工况。因此,本文将采用状态估计的方法对以上参量进行观测。
1)悬架力估计
悬架力包含弹簧力及阻尼力,本文采用线性位移传感器为量测量的悬架力估计方案,即由LVDT测量悬架动变形,通过卡尔曼滤波算法对包含噪声的量测量进行滤波处理,再对动变形数据进行差分,得到其变化率,从而计算得到悬架系统的弹性力和阻尼力,完成悬架力的估计。
图4为随机路面激励下左前侧悬架动挠度曲线,红色曲线为滤波后的左前侧悬架动挠度,绿色曲线为不含噪声的真实值,蓝色曲线为含噪声的量测值。从图4中可知,卡尔曼滤波算法有效剔除量测噪声干扰,平滑且较为准确地还原了状态信息。
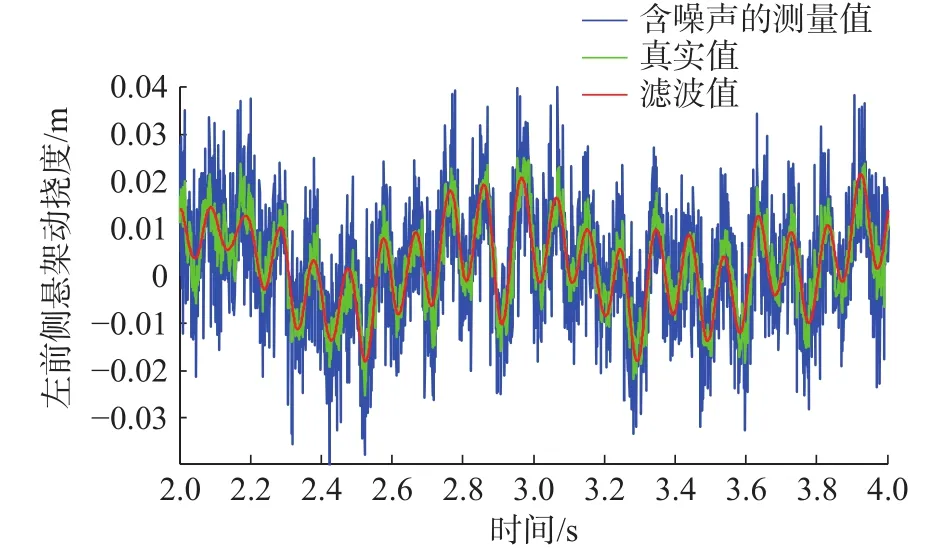
图4 悬架动挠度滤波对比
2)质心侧偏角、车身侧倾角、轮胎侧向力等操稳性相关状态估计
对于轮胎侧向力等状态量,因超过0.4g的侧向加速度后,轮胎侧偏力呈现出非线性,故本文采用适用于非线性系统的无迹卡尔曼滤波算法构造状态观测器,以低成本的IMU传感器测量车身侧倾角速度、车辆侧向加速度和横摆加速度,完成操稳性相关参量的实时估计。
将轮胎侧向力视为马尔科夫过程,即Fyi′=0,可扩展为状态向量,即

根据式(1)~式(3),采用一阶泰勒展开对系统进行离散,得到离散系统为:

式中:离散采用时间 dt=0.001 s;wk为过程噪声,vk为量测噪声,两者为互不相关的白噪声。
选择量测量为

以上量测状态可以通过IMU传感器直接获得。
选择观测量为

4 操稳性及抗侧倾多目标集成控制器设计
4.1 操稳性理想参照
以线性二自由度稳态响应[1]为理想参照,理想横摆角速度、质心侧偏角变化率为:

对式(16)整理,得到

式中:µ为路面附着系数;K为稳定性因素,K=为前后轴轮胎侧偏刚度;L为轴距。
4.2 AFS操稳性控制器
综合考虑横摆角速度与质心侧偏角的控制需求,设计综合体现横摆角速度及质心侧偏角控制滑模面S[1,13]:

式中 λr为大于零的常数。对综合滑模面S求导,且令S′=0,得到等效前轴轮胎侧向力控制率得到

为使控制系统在干扰及参数不确定时也能保持稳定,且尽量减小滑模控制抖动现象,加入饱和函数得

式中:k0为大于零的常数;sat(x)为饱和函数。

式中:ε为边界厚度, ε >0,调节 ε值,可改善抖振问题。
为检验控制系统的稳定性,为滑模控制器设计李雅普诺夫函数V=0.5S2≥0,对其求导,得到:

式(20)的控制率可使V′≤0,由此可知,所设计的控制系统渐近稳定。
计算得到理想Fyf值后,根据轮胎模型,求解得到理想车轮侧偏角 αd的数值解,然后计算理想侧偏角 αd与当前车轮侧偏角 αf的差值,即 Δ δf=αd−αf。
4.3 主动横向稳定杆抗侧倾控制
1)控制介入与退出时机
主动横向稳定杆主要用于改善因转向引起的非绊倒性侧翻(或侧倾),由此可知,侧向加速度是引起车身侧倾的根源。同时,考虑到侧向加速度比较小的情况下,车身侧倾轻微,并不需横向稳定杆的主动抗侧倾介入。故设计主动横向稳定杆介入与退出机制。本文以侧向加速度为判据,当其达到一定阈值时,横向稳定杆抗侧倾控制才主动介入。介入规则可定义为:
2)主动横向稳定杆抗侧倾控制器
同样采用滑模控制方法,设计滑模面Sθ为

式中: θd和 θd′分别为理想车身侧倾角及其变化率。对Sθ求导,且令Sθ′=0,结合式(3),可得

为使抗侧倾控制器在干扰及参数不确定时也具有鲁棒性,且尽量减小滑模控制器的抖动现象,加入饱和函数得

式中k0θ为大于零的常数。控制系统的稳定性证明与AFS控制器同理,可确保系统渐近稳定,控制误差趋于零。
4.4 多目标协调控制
轮胎垂向载荷与轮胎侧向力相互耦合,主动侧倾力矩在前轴和后轴的分配将直接影响车辆在前轴和后轴的载荷转移量,进而影响车辆的操纵稳定性;与此同时,前后轴上的侧倾力矩Mf、Mr在满足式(26)的前提下,具有无穷多种分配方案。针对此,本文采用PID控制器,以进一步改善车辆稳定性为目标对前后侧倾力矩进行动态分配。具体而言,欲增大不足转向,则需增大前轴侧倾刚度,故将加大Mf占比;反之,欲增大过多转向,则加大Mr占比。由此将式(26)改进为:

5 仿真与分析
为验证构建的主动横向稳定杆抗侧倾控制系统的有效性,文章将采用图5a)所示的鱼钩实验工况进行仿真与分析。
设置期望的车身侧倾角为经过0.5 s的过渡后稳定至1°。采用滤波白噪声法生成B级随机路面不平度激励,车辆前进车速为16.7 m/s,前轮左右两侧的路面不平度系数分别设置为 64×10−3m−3和40×10−3m−3,后轮则处理为前轮激励延时L/Vxs。采用表1数据,得到图5 ~ 图6所示的结果。

图6 车辆性能对比

表1 仿真参数数据表[9]

图5 车辆状态估计对比
图5b)~图5d)分别为鱼钩测试工况下的前轮侧偏角、轮胎侧向作用力和整车质心侧偏角等典型状态量的估计结果。从中可知,上述状态量的估计值与真实值在变化趋势和幅值上均有较好的吻合度,由此说明本文所构建的状态观测系统能够较为准确地完成关键状态量的估计,从而为控制系统提供良好的信息保障。
图6a)的车辆横摆角速度对比显示,相比于理想参照,被动模式的横摆角速度响应在转向角峰值输入时存在较大超调,车辆表现为过多转向,且当方向盘回到直行状态(7.25 s时刻),车辆仍处于横摆状态,约在第8 s才回到稳态。
图6b)和图6c)表明,仅AFS控制,车辆横摆角速度和质心侧偏角也能得到很好的控制,但采用AFS与主动横向稳定杆的集成控制,能够更加精确地跟踪理想横摆角速度参照,质心侧偏角被抑制在更低水平的同时,其变化也更加平滑。图6d)显示,被动模式最大车身侧倾角已超过9°,仅主动横向稳定杆控制可使车身侧倾姿态控制在1°的目标值,但采用AFS与主动横向稳定杆的集成控制,车身侧倾姿态能够更快趋于稳定。图6e)和图6f)为β-β'及θ-θ'相平面图,相比于被动模式、单独AFS和单独横向稳定杆控制,集成控制可将质心侧偏角及其变化率约束在更小的稳定区域,且具有更快的收敛速度。
6 结论
1)建立了整车9自由度动力学模型及非线性轮胎模型,采用UKF算法设计了车身侧倾角、质心侧偏角及轮胎侧向力状态估计系统。仿真结果表明,以上参量的估计值与真实值吻合度高,能够为控制系统提供准确状态信息。
2)采用滑模变结构控制算法,设计车辆操稳性及抗侧翻控制器,同时考虑侧倾力矩分配对操稳性的影响,通过PID控制器动态调整前后横摆力矩分配系数以进一步提升车辆操稳性。仿真结果表明,集成控制系统比单独的AFS控制和单独的主动横向稳定杆控制具有更小的稳定区域和更快是收敛速度。
