不同海况等级下传递对准杆臂效应的影响研究
2022-04-18陈永展袁涛曲建岭魏喜坤
陈永展,袁涛,曲建岭,魏喜坤
(1.海军航空大学青岛校区,山东青岛 266041;2.阿米检测技术有限公司,江苏无锡 214000)
0 引言
舰载机和武器系统的定位跟踪依靠机载惯性导航系统,通过母舰的主惯导对舰载机的子惯导进行传递对准。由于受到海洋环境的干扰较多,其中,对准时存在杆臂效应影响了对准精度和对准时间。
S.P.Dmitriyev等人[1]提出一种采用巴特沃斯低通滤波器对杆臂效应在线补偿的方法。SEO等人[2-3]提出力学补偿法的概念,并用试验对杆臂效应误差的力学补偿法进行了验证。李蓓[4]提出了速度误差观测量补偿和低通滤波器两种杆臂效应误差的补偿方法。这三种补偿方法能够对杆臂效应较好地补偿,但是缺少在某一具体装备下三种补偿方法效果的对比。西北工业大学提出了舰载直升机动基座对准技术的方案设计,后来主要就系泊情况和航行情况下的舰载机初始自对准技术进行了研究,国内西北工业大学、国防科技大学、海军航空大学等对舰载战斗机动基座传递对准均取得一定理论研究成果,但在海洋环境中不同海况对传递对准的影响研究较少。
本文通过研究不同海况等级对传递对准中的等效杆臂效应,建立船舶六自由度模型,对舰载战斗机动基座传递对准采用三种补偿方法进行仿真分析。
1 船舶六自由度模型建立
船舶在海面上受到的干扰力不规则,力的方向和大小变化不定,很难用简单的数学模型进行完全精准的描述。为了建立能够描述船舶在海面上的受力情况需要进行一些前提假设,通过系统分析简化海面的作用力,将一些影响较小的作用力进行忽略以建立六自由度模型。本文基于日本操纵性数学模型研讨组的分离型思想(MMG),将船舶在海面行驶时受到的总作用力单独考虑,分为裸船体、敞水桨、敞水舵和风浪流引起的水动力进行叠加,并且忽略海浪、海涌等外界环境对敞水桨、敞水舵的影响,用裸船体、敞水桨、敞水舵在静水中所受的干扰力代替动水中的干扰力。
应用参考文献[7]中简化后的船舶六自由度模型为
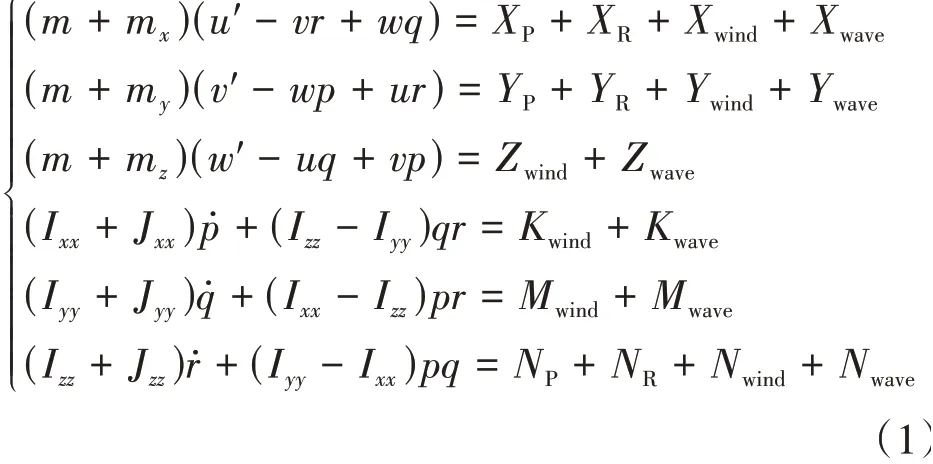
式中:m为船舶质量,kg;mx,my,mz分别为船舶沿着X,Y,Z轴的附加质量;Ixx,Iyy,Izz分别为船舶绕X,Y,Z轴的转动惯量;Jxx,Jyy,Jzz分别为船舶绕X,Y,Z轴的附加转动惯量;下标P,R,wind,wave分别为敞水桨、敞水舵、风、海浪对船舶的力和力矩。
1.1 附加质量
船舶平面运动附加质量估算公式为[8]
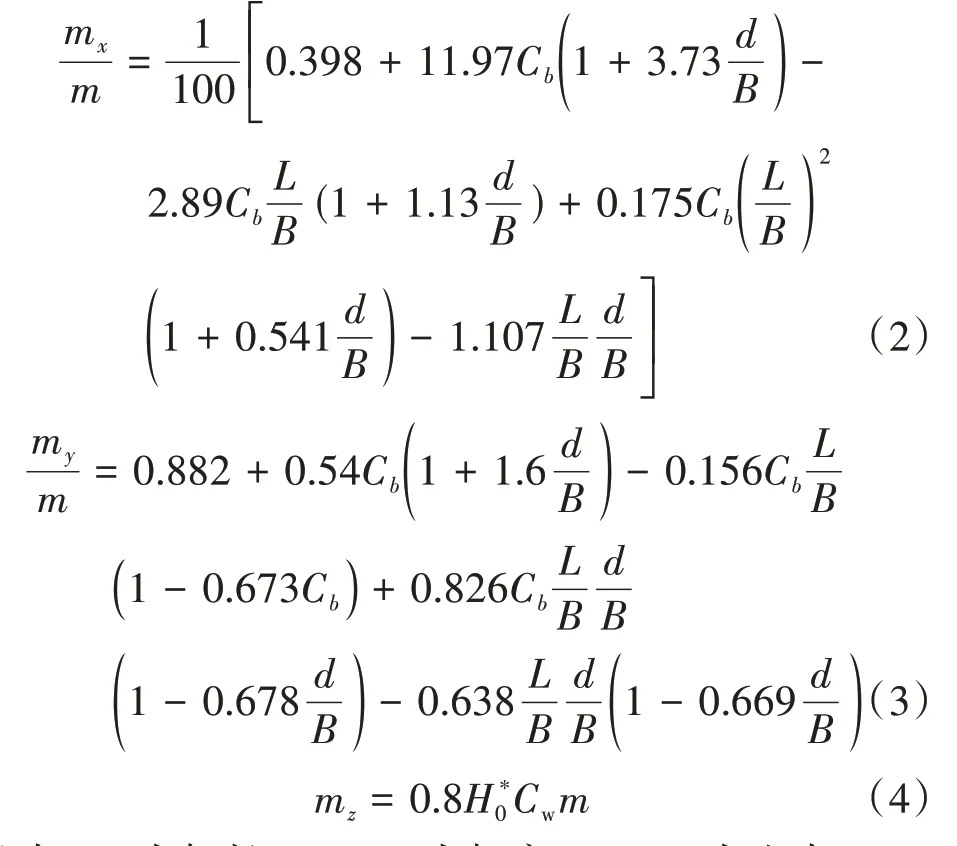
式中:L为船长,m;B为船宽,m;d为吃水,m,取标准排水量下的吃水8.96 m;Cb为方形系数;Cw为水线面系数;H*0为船中宽吃水比。
1.2 螺旋桨力和力矩计算模型
螺旋桨力和力矩表示为[9]
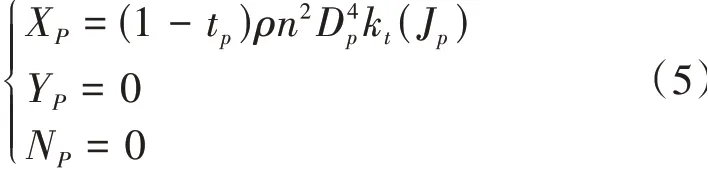
式中:ρ为流体密度,kg/m3;n为主机转速,r/min;kt(Jp)为桨的推力系数;tp为推力减额分数;DP为桨直径,取6.5 m。
1.3 舵力和力矩计算模型
舵力和力矩计算模型为[8]
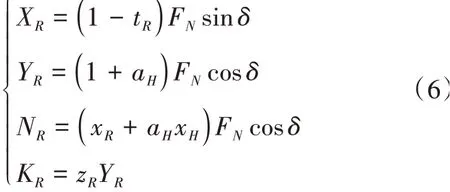
式中:FN为垂直于舵叶平面的正压力,N;tR为舵力减额系数;δ为舵角,(o);a H为操舵诱导船体横向力的修正因子;x H为操舵诱导船体横向力的作用中心到船舶重心的距离,m;xR为舵中心到船舶重心的纵向距离,m;zR为舵正压力中心到船舶重心的垂向距离,m。
1.4 波浪力仿真数学模型
将船简化为箱体船,得六自由度力和力矩为[10]
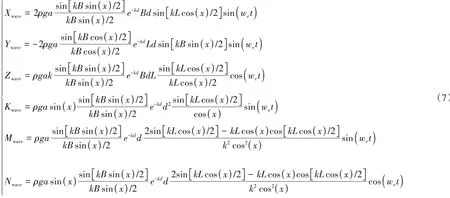
式中:a为波幅,m;k为波数;we为遭遇频率;x为遭遇浪向角;ρ为流体密度,取1.025 kg/m3;g为重力加速度,取9.8 m/s2。
不同海况等级下遭遇频率we取值见表1,为计算波浪力仿真数学模型提供数值参考。
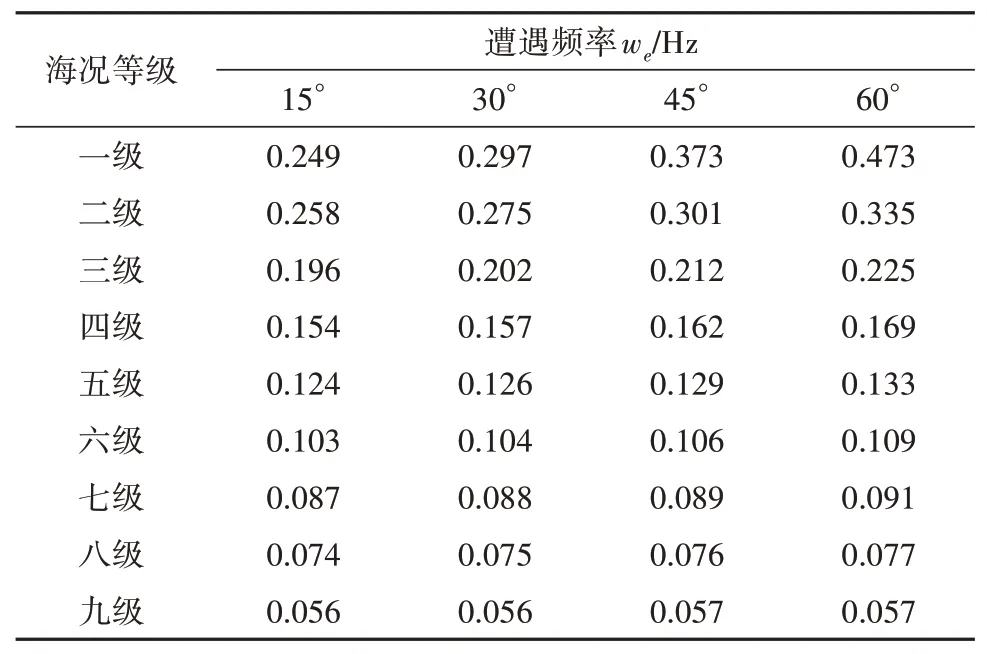
表1 遭遇频率值(V=18节)Tab.1 Values of encounter frequency
1.5 风力和力矩计算模型
忽略风力对船舶垂荡和纵摇的干扰,风力和力矩为[9]
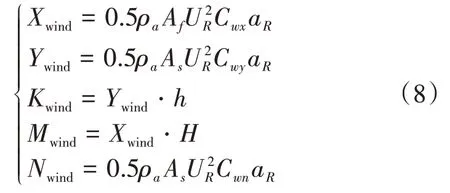
式中:Cwx,Cwy,Cwn为风压力和力矩系数;a R为风舷角,rad;h为船舶横向受风作用点的高度到取矩点的高度,m;H为船舶纵向受风作用点的高度到取矩点的高度,m;Af为船体水线上正投影面积,m2;As为船体水线上侧投影面积,m2;ρ为空气密度,取0.001293 g/cm3。
2 速度匹配传递对准卡尔曼滤波方程
2.1 卡尔曼滤波方程
卡尔曼滤波离散方程为[11]

式中:Xk为系统的n维状态变量;Zk为系统的m维观测序列;Γk,k-1为n·p维噪声输入矩阵;Φk,k-1为n·n维k-1时刻到k时刻状态转移矩阵;Wk为p维系统激励噪声序列;Hk为m·n维观测矩阵;Vk为m维量测噪声序列。
过程噪声和量测噪声满足
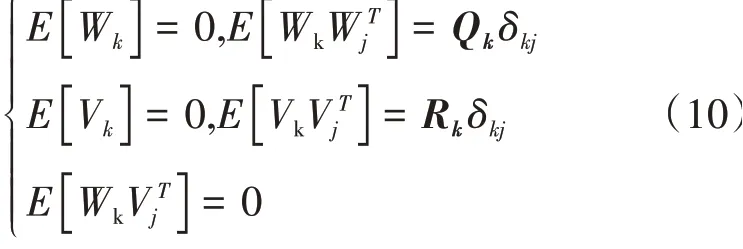
式中:Qk为系统过程噪声Wk的p·p维对称非负定方差矩阵;Rk为系统观测噪声Vk的m·m维对称正定方差矩阵;δkj为克罗内克函数。
线性离散卡尔曼滤波状态一步预测方程为

状态估计为

滤波增益矩阵为

一步预测误差方差矩阵为

估计误差方差矩阵为

观察分析卡尔曼滤波方程,任何系统给定初值X^0和P0,结合k时刻的观测值Zk,就可以递推算法计算得到k时刻的状态估计X^k。
2.2 卡尔曼滤波状态方程与量测方程
海洋环境仿真中,由于垂直通道影响小且垂直通道和水平通道之间的耦合小,故忽略垂直通道。
取状态变量X为

系统状态方程为

选主子惯导间的速度差为观测量,则观测方程为

式中:v为满足E(vvT)=R的零均值系统白噪声;H为系统的量测矩阵。

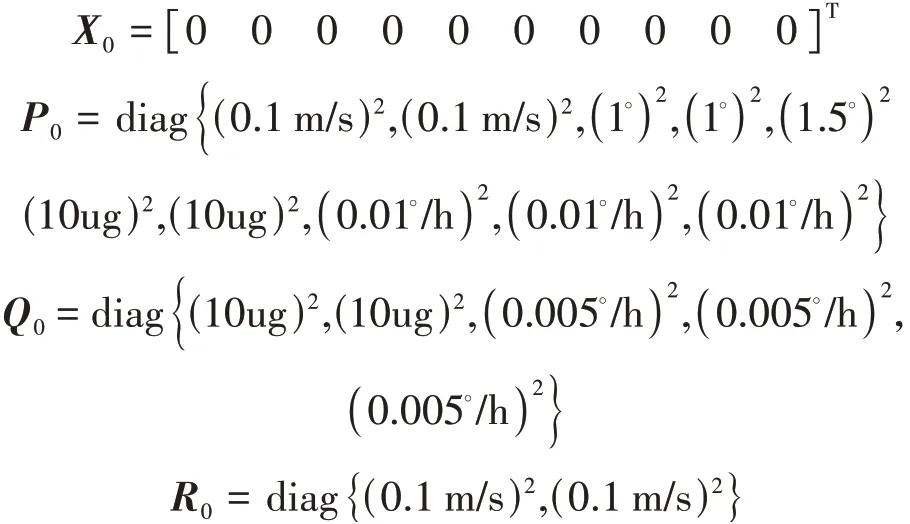
卡尔曼滤波初始值为
3 不同海况等级传递对准仿真
3.1 仿真条件
海浪摇摆产生的三轴运动属于正弦函数,其数学模型为
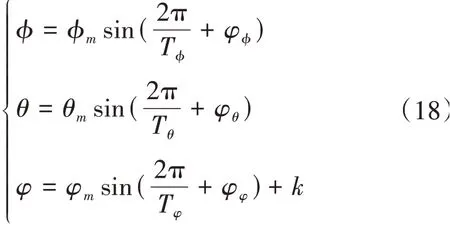
某舰六自由度模型由龙格-库塔法解出微分方程,以不同海况进行分级,其仿真条件见表2,不同海况下横摇、纵摇、艏摇角度幅值见表3。
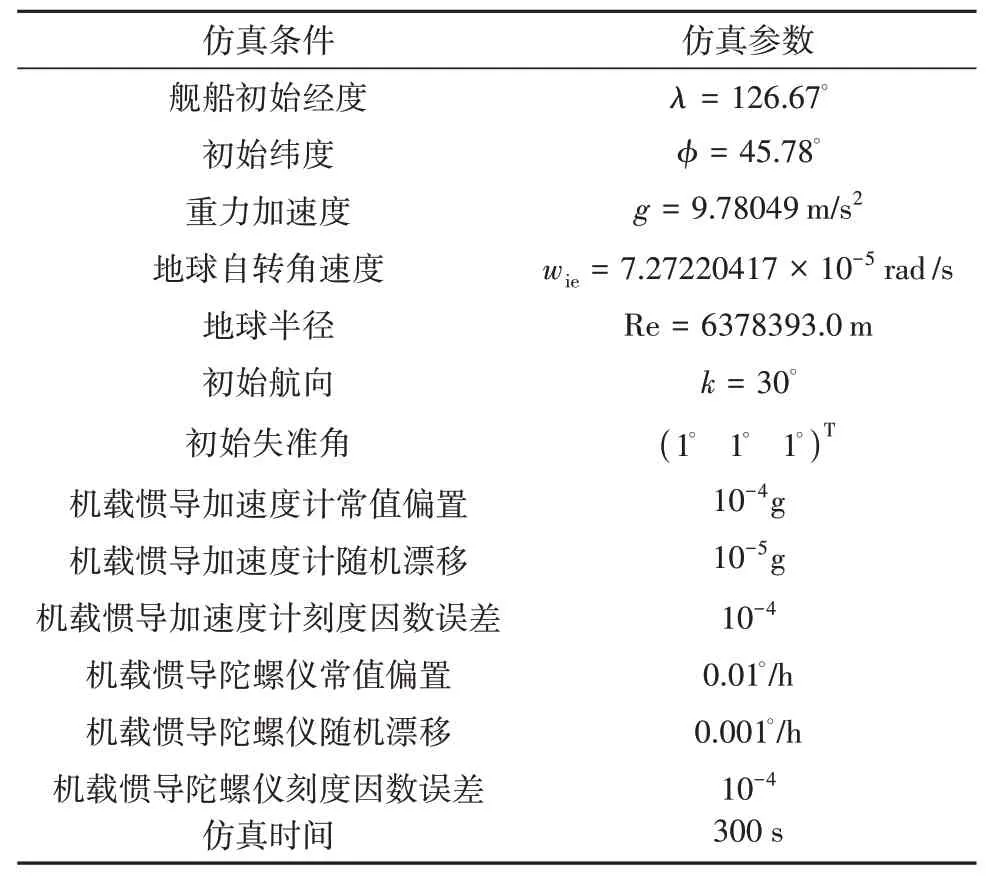
表2 仿真条件Tab.2 Simulation conditions
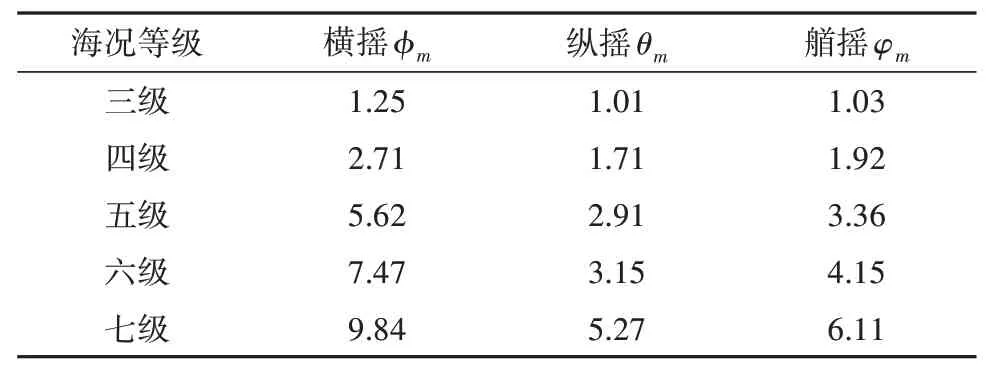
表3 不同海况等级下的横摇纵摇艏摇角度幅值Tab.3 Amplitude of roll pitch and yaw angleat different sea state grades (°)
3.2 杆臂效应对传递对准的影响
考虑杆臂效应对传递对准的影响,设杆臂长度为(1 1 1)T,图1为五级海况时加速度计输出。
从图1中可以发现加速度计输出曲线波动幅值较大,将天向加速度数值进行提取,天向加速度数值分级统计见表4。
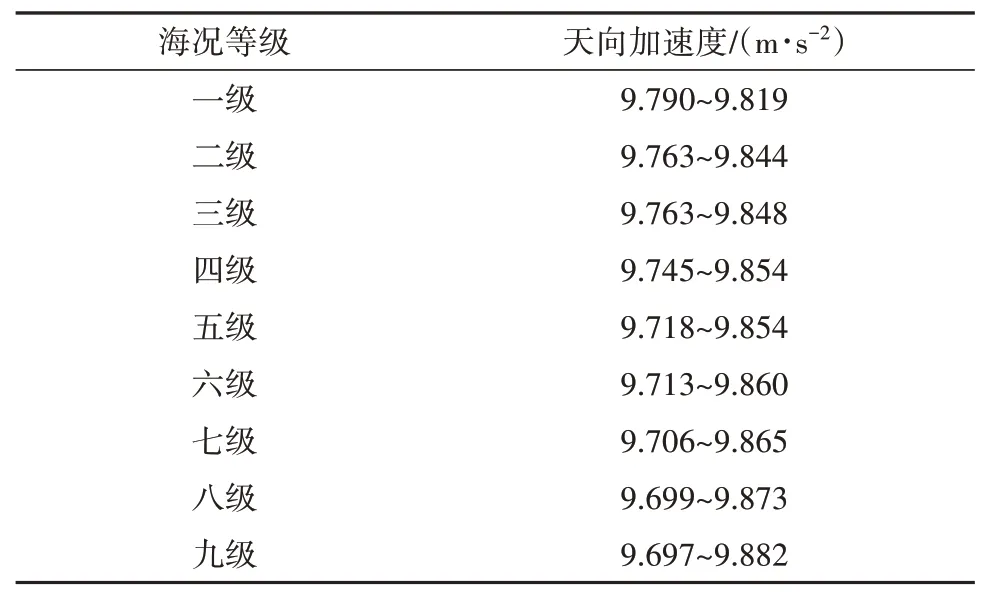
表4 不同海况等级下天向加速度范围Tab.4 Rangesof upward acceleration at different sea state grades
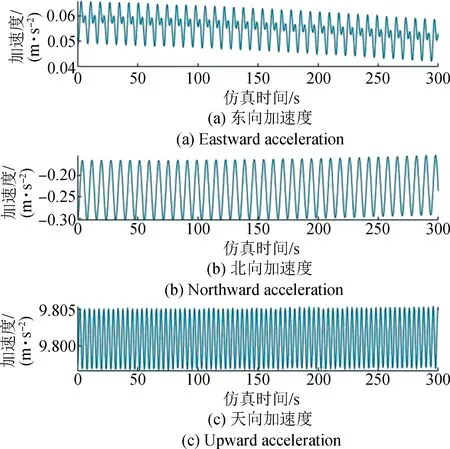
图1 五级海况时加速度计输出Fig.1 Accelerometer output at grade five sea state
从表4可以得出,一级海况时波动幅值为0.029,每一级海况的波动幅值都在增大,到达九级海况时波动幅值达到0.185,从一级海况到九级海况,天向加速度输出显著变化。
由此可见,加速度计的输出受海况影响而不稳定,产生的等效杆臂效应对传递对准的影响较大,使系统整体加速度计输出波动变化明显,呈发散状态不利于对准,因此在实际对准中需要对杆臂效应进行补偿。
3.3 杆臂效应补偿方法
3.3.1 巴特沃斯低通滤波法
卡尔曼滤波用k-1时刻的最优估计预测k时刻的状态变量,新的最优估计是根据上一最优估计预测得到的,并加上已知外部控制量的修正,因而新的不确定性由上一不确定性预测得到,并加上外部环境的干扰,
可以考虑采取更优化的杆臂效应补偿方法。
巴特沃斯滤波器的特点是通频带内的频率响应曲线最大限度平坦,在阻频带则逐渐下降为零,且频率特性曲线无论在通带内还是阻带内都是频率的单调函数。当通带的边界处满足指标要求时,通带内留有裕量。因此可用较低阶数的系统将精确度均匀的分布在整个通带或阻带内。
杆臂效应加速度频谱分析如图2所示,由频谱分析可选取通带截止频率0.02 Hz,阻带截止频率0.5 Hz,通带衰减不得高于3 db,阻带衰减不得低于40 db。

图2 杆臂效应加速度频谱分析Fig.2 Spectral analysis of acceleration of lever armeffect
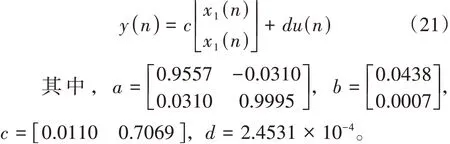
采用二阶巴特沃斯低通滤波器进行滤波[10]
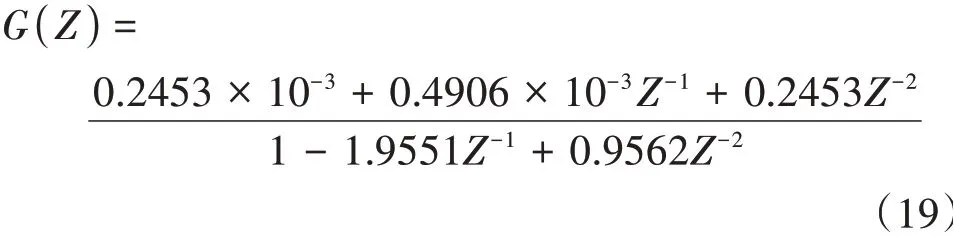
滤波器方程为

输出方程为
滤波后五级海况加速度计输出如图3所示。

图3 巴特沃斯低通滤波前后五级海况加速度计输出Fig.3 Accelerometer output at grade five seastate before and after Butterworth low-pass filtering
通过对比不同海况等级下的仿真图,可以发现三轴失准角均呈现收敛状态,滤波前后加速度计输出范围明显缩小,取t=250 s时三轴失准角进行分析如图4,仿真数据见表5。
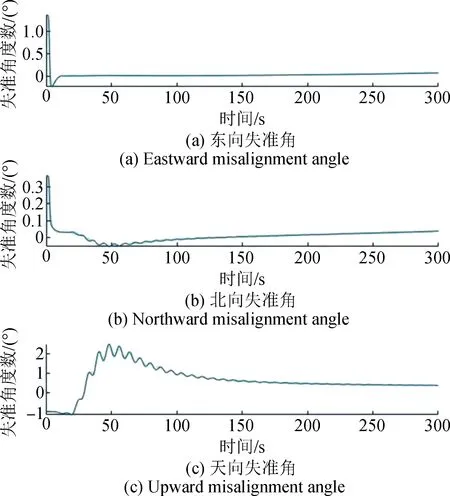
图4 巴特沃斯低通滤波后五级海况三轴失准角变化曲线Fig.4 Changing cure of three-axis misalignment angle at grade five sea state after Butterworth low-pass filtering
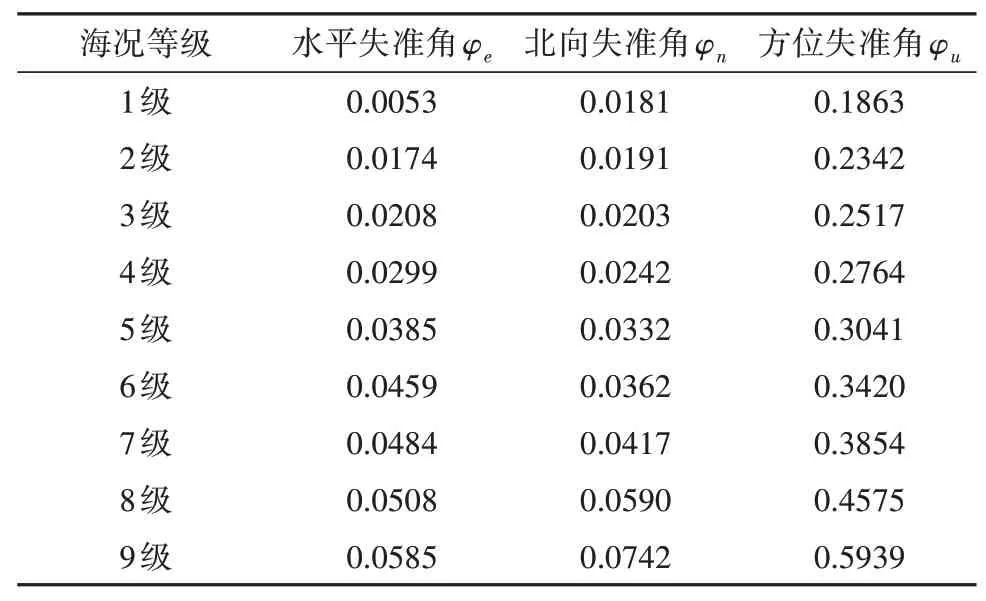
表5 不同海况等级下三轴失准角大小Tab.5 Values of triaxial misalignment angle at different sea state grades (°)
由图3图4和表5结合可知,四级海况时水平失准角φe在9.8 s后逐渐趋于稳定,φn在78 s后逐渐趋于稳定,稳定前波动幅值在-0.009~0.0262之间变化,幅值变化较未滤波曲线明显减弱,方位失准角φu在0 s到150 s内振动剧烈,后在250 s处仍存在0.2764°失准角。
五级海况时水平失准角φe在11.6 s逐渐趋于稳定,φn在109 s后逐渐趋于稳定,稳定前波动幅值在-0.0169~0.0321之间变化,幅值变化较未滤波曲线明显减弱,方位失准角φu在0 s到200 s内振动剧烈,后在250 s处仍存在0.3041°失准角。
六级海况时水平失准角φe在13 s逐渐趋于稳定,φn在122 s后逐渐趋于稳定,稳定前波动幅值在-0.027~0.03之间变化,幅值变化较未滤波曲线明显减弱,方位失准角φu在0 s到200 s内振动剧烈,后在250 s处仍存在0.3420°失准角。
七级海况时水平失准角φe在13.8 s逐渐趋于稳定,φn在142 s后逐渐趋于稳定,稳定前波动幅值在-0.0385~0.039之间变化,幅值变化较未滤波曲线明显减弱,方位失准角φu在0 s到220 s内振动剧烈,后在250 s处仍存在0.3854°失准角。
八级海况时水平失准角φe在15.9 s逐渐趋于稳定,φn在180 s后逐渐趋于稳定,稳定前波动幅值在-0.068~0.065之间变化,幅值变化较未滤波曲线明显减弱,方位失准角φu在0 s到250 s内振动剧烈,后在250 s处仍存在0.4575°失准角。
随着海况等级的提高,三轴失准角呈现逐渐增大的趋势,以五级海况为例,东向失准角的估计误差为0.0385°,北向失准角的估计误差为0.0332°,方位失准角的估计误差为0.3041°,属于估计误差范围内,可认为五级海况位进行速度匹配传递对准的最高等级海况。二阶巴特沃斯低通滤波器能够滤去等效杆臂效应引起的加速度计分量,但是无法完全滤去引起的有害加速度,可以采用计算补偿法对等效杆臂效应进行补偿,计算补偿后精度相比卡尔曼滤波、巴特沃斯低通滤波更高且收敛时间更短[12-14]。
3.3.2 计算补偿法
卡尔曼滤波中观测方程选取主子惯导的速度差,但未补偿速度差观察量中杆臂效应速度项,使得杆臂效应速度一直存在影响系统精度。计算补偿法通过在速度差观测量中采取补偿杆臂效应速度来提高系统精度。
主子惯导杆臂速度为

主子惯导杆臂速度在导航坐标系中的投影为

又

因此
补偿掉杆臂效应速度项后,速度误差观察量为

以五级海况为例,对比分析三种滤波方法下不同方向的加速度计输出波形如图5所示。(蓝线为卡尔曼滤波,红线为巴特沃斯低通滤波,黑线为计算补偿法后的卡尔曼滤波。
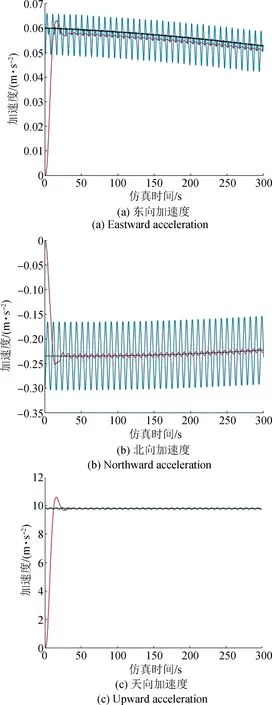
图5 三种滤波方法下,不同方向的加速度计输出波形Fig.5 Output waveforms of accelerometers in different directions with three filtering methods
从输出波形可以看出,计算补偿法补偿精度和收敛速度相较于卡尔曼滤波和巴特沃斯低通滤波器效果更好,收敛时间更短,整个滤波更为稳定。究其原因,计算补偿法要求事先测得杆臂长度,理想条件下计算补偿效果更好,如果测量杆臂长度存在较大偏差则结果可能不理想,因此存在局限性。
计算补偿法通过严格的数学计算在速度差观测量中采取补偿杆臂效应速度,但不能完全补偿杆臂效应。
4 结论
针对不同海况等级对传递对准杆臂效应影响效果的问题,本文基于分离建模的思想建立船舶六自由度模型,进而建立等效杆臂效应模型,采用三种滤波方法补偿杆臂效应,补偿结果表明:
1)不同海况等级对传递对准产生的杆臂效应不同,海况等级越高,杆臂效应越明显,越不容易补偿,对准精度和对准时间均超过快速对准要求。
2)对比分析三种补偿方法:速度匹配传递对准采用卡尔曼滤波方法进行滤波不能完全滤去等效杆臂效应误差,需要进行进一步的补偿;采用二阶巴特沃斯低通滤波器能使杆臂效应得到收敛,但是失准角仍有进一步的收敛空间,可采用计算补偿法对杆臂效应进行补偿;计算补偿法直接补偿主子惯导的速度差,不能完全补偿杆臂效应,但其补偿精度和收敛速度更好,在具体应用中固定主子惯导空间位置,测量出实际杆臂长度,可以得到更为精确的补偿。
3)根据仿真结果分析,五级海况为进行速度匹配传递对准的最高等级海况,实际对准低一个海况等级下作为参考,建议实际对准中将四级海况定为传递对准最高等级海况。
传递对准精度受惯性器件误差、数据传输时延误差、舰船的挠曲变形和杆臂效应影响,本文考虑杆臂效应影响,后续研究可以综合考虑误差情况。
