机械密封技术的发展历程及其展望
2022-04-18马续创
秦 仙,马续创
(1.宝钢股份梅钢公司冷轧厂,江苏 南京 210039;2.中国重型机械研究院股份公司,陕西 西安 710018)
0 前言
机械端面密封,是一种旋转件动密封,简称机械密封,又称端面密封、轴向机械密封[1]。机械密封尽管不是设备上的功能性零部件,但其作用和对整台设备、整个车间,甚至整个工厂的影响都很大,特别是随着化工、石油、动力、轻工、原子能、宇航等工业的发展,它的作用变得越发重要。百余年时间里,国内外专家学者对机械密封技术进行了大量研究试验和生产实践工作。
1 国外机械密封技术的发展
1.1 机械密封的起源
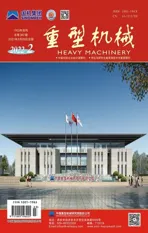
机械密封的起源于1885年的英国[1]。面对常规填料密封难以解决液压传动、蒸汽机和机床等上的密封难题,有人构思出机械端面密封的解决方案,并申请了第一个关于机械密封的专利。即使是优秀的构思,应用于实际生产往往也需要理论到实践的过程。终于到1900年,该构思开始成功应用为轴承的油封,其结构如图1所示[2]。这个解决方案是机械密封的雏形。它看起来简单且问题诸多,容易遭受人们的质疑,但确实率先提出使用端面进行密封的观点,是创造性的构思。
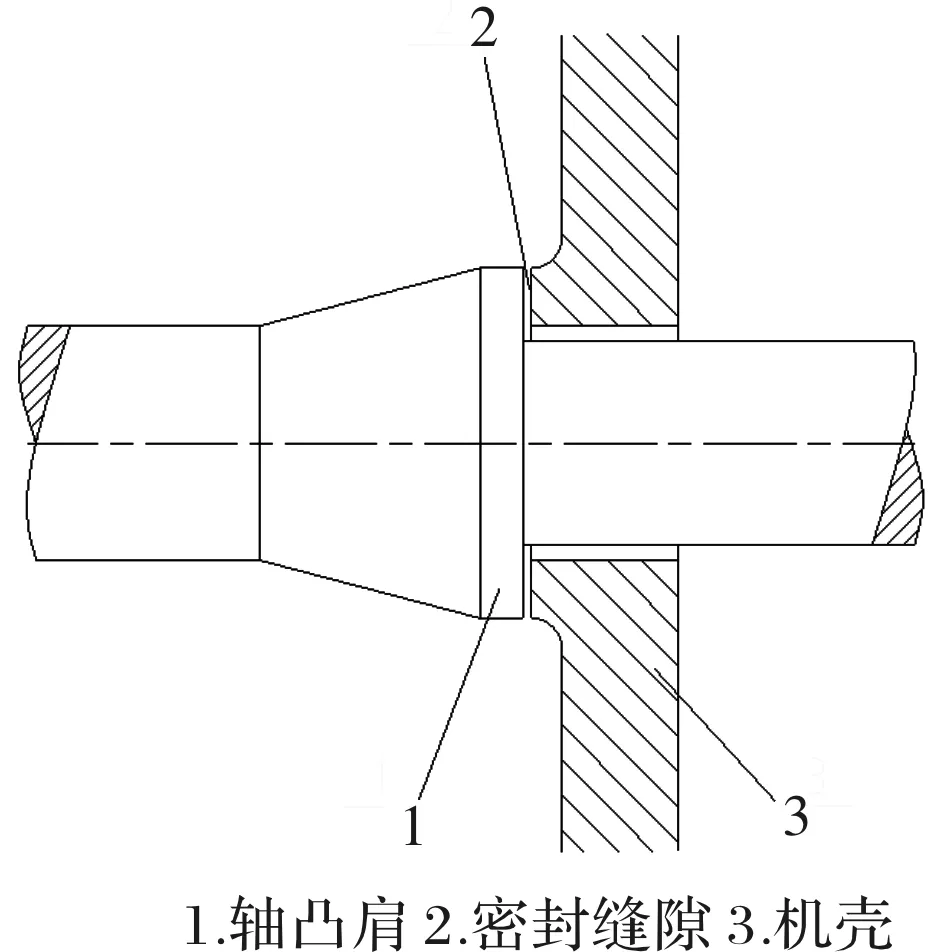
图1 机械密封的雏形
在实践中不均匀的温度场往往使得轴发生热膨胀而伸长,导致该雏形容易发生端面密封失效的情况。为了解决该问题,人们于1908年在几个汽轮机密封上开始尝试改进为轴可移动的密封环密封。
1.2 机械密封的基本结构
1913年,英国出现在汽轮机上使用双端面机械密封的专利。1919年出现单端面机械密封[2]。至此,机械密封的基本结构成形。
机械密封由摩擦副、缓冲补偿机构、辅助密封圈和传动机构组成,如图2所示。摩擦副由动环和静环组成的密封端面,缓冲补偿机构由弹性元件为主要零件组成其作用是使密封端面紧密贴合,辅助密封圈有动环和静环密封圈,传动机构使动环随轴旋转。
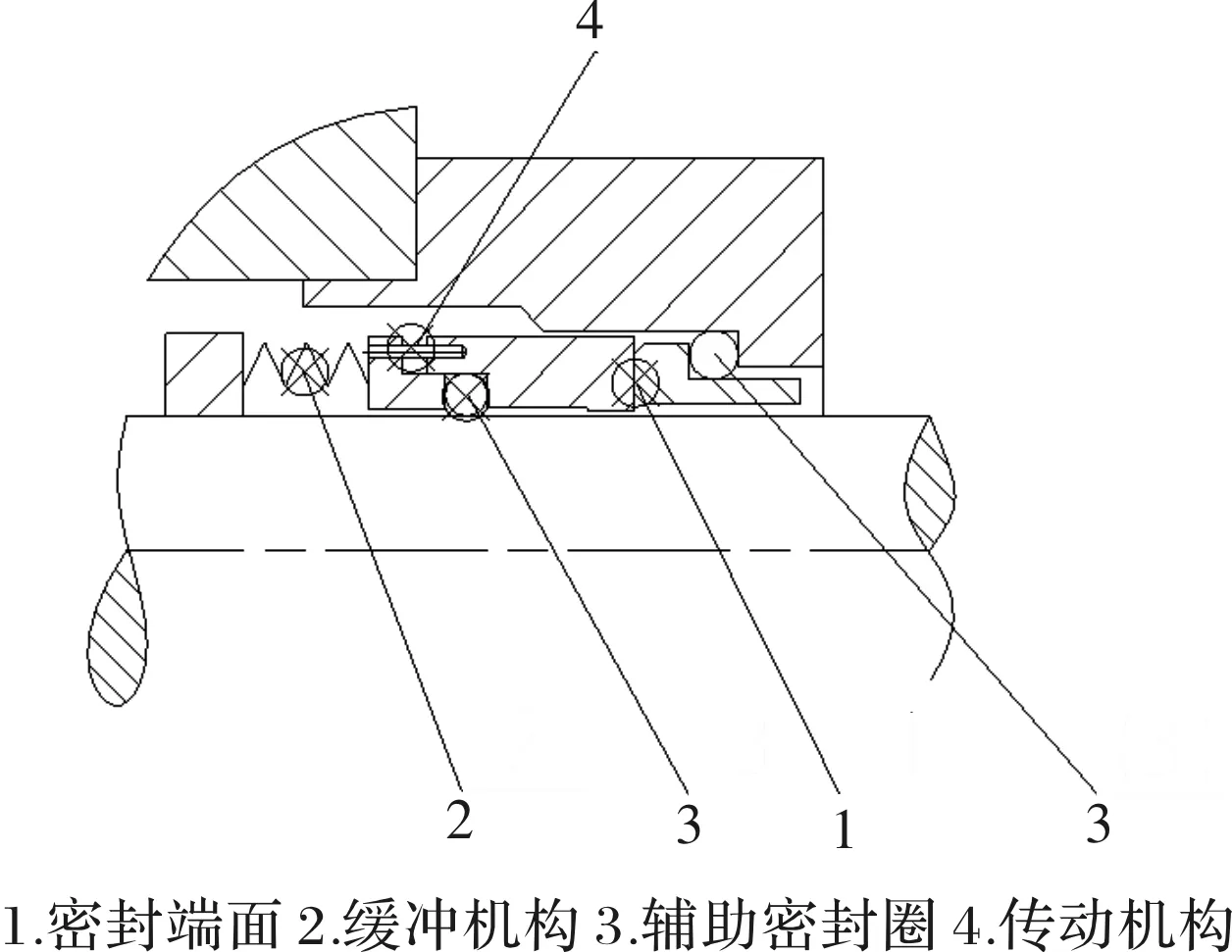
图2 机械密封的基本结构
1.3 机械密封的应用
1920年以前小型家用冷冻压缩机和汽车上水泵的轴封采用了机械密封。1930年用于内燃机水泵密封。1940年机械密封在一定的程度上解决了轻烃泵密封问题。
1.4 机械密封的发展
机械密封的起步阶段,并不受重视,得不到高质量的材料做支持。随着其应用的推广,尤其是应用场合的重要性的提高,人们开始尝试使用更好的材料、加工和检测手段来改进它。
自1940年起,密封面的材料被大量尝试,出现陶瓷、石墨、硬质合金等新的密封材料。原来的密封材料有的被淘汰有的被改进,甚至出现了可不进行润滑的最佳化配对材料。杜拉迈特公司发表了一些选择材料用的线图,其中列出了各种液体介质和推荐的响应材料,从而免除为选用密封元件材料需作的广泛调研工作[4]。
对密封面的泄漏量影响最大的是两表面间距离。减小两密封端面的平面度可减小其间距,从而降低泄漏量。
为了降低机械密封端面的平面度,人们开始使用专用的研磨设备或手工研磨使端面均匀磨耗,再抛光到具有镜面光洁度,使平面度检验中能读出光带数。同时将检测平面度的手段从比较试验法改进为使用单色光源和光学平晶装置。利用这两种装置不仅能定性地测出平直与否,还能定量地读出平面度数。
这三方面的改进使得机械密封的psV值水平提高到3.04 MPa·m/s。
1.5 机械密封形成
(1)平衡型机械密封。密封端面压力变化趋势,如图3所示,粘度大的按曲线1分布,粘度小的按曲线3分布,水按直线2分布[5]。
图3 液膜压力的分布
用介质反压系数来描述密封端面间液膜平均压力与密封液体(即介质)压力之比,通过实验推荐介质反压系数的经验值。一般液体介质反压系数为0.5,粘度大的液体反压系数1/3,气体、液态烃等易挥发介质的反压系数0.707[5]。
随着研究的深入,人们认识到可以通过调整密封环的轴向受压面积来减少密封液体压力对密封端上的密封力的影响程度。理想情况下当密封环轴向受压面积与密封端面的比值等于介质反压系数时,介质压力变化不影响密封端面的密封力。据此分析,1945年平衡型机械密封问世。机械密封的psV值水平提高到14.7 MPa·m/s。自此之后,平衡型机械密封代替了原有的非平衡型机械密封。
(2)中间环机械密封。平衡型机械密封产生的同年,为解决低速下油膜不能生成足够的开启力和高速下密封面摩擦、磨损、发热、变形等问题,中间环高压高速机械密封也被提出。它是指在静环和动环之间增加一个中间环,中间环旋转运动独立于主轴转速,形成两个密封端面。当主轴转速过低或过高时,可以改变中间环的转速,从而控制两个密封端面的相对转速在机械密封端面的承受范围这内。
(3)高温机械密封。随着应用场合不断拓展,机械密封遭遇了航空、石油化工工业的新的工况:机械密封须承受400 ℃高温。在这种高温下,传统的机械密封中的密封圈都会很快失效,从而导致机械密封失效。
为了解决这一难题,美国西乐Sealol公司于1957年研制了第一套金属焊接波纹管高温机械密封。该金属焊接波纹管集弹性元件、辅助密封和转矩传动机构于一身,可耐受-240~650 ℃,将机械密封的psV值水平提高到30 MPa·m/s[6]。
(4)组合型非接触机械密封。接触式机械密封实验证明:减小弹簧比压会使液膜厚度增加,并减小磨损,但同时会造成泄漏量的增加;增加弹簧比压会减小液膜厚度,减小泄漏量,但会增加磨损。在人们的认知范围内,减小磨损和减小泄漏是矛盾的,直到非接触机械密封的产生。
人们对非接触密封的构思很巧妙。单个机械密封难以同时满足减小磨损和减小泄漏两个任务,可以将这两个任务分别交给两个机械密封来共同完成。具体来说就是将非接触密封和接触式密封串联使用,非接触机械密封用以承担大部分压力,完成减小磨损的任务,而接触式密封承担小部分压力,完成减小泄漏的任务。
这种构思实质上是组合式机械密封,最早应用在1960年。人们在密封端面上开毫米级的均布式深槽。运转时,该深槽使密封端面在力和热作用下产生周向波度和径向锥度。周向波度产生流体动压效应,径向锥度产生流体静压效应。这就是热动力楔机械密封。人们将其配合接触式机械密封使用,成功地解决了减小磨损与减小泄漏的矛盾。
1963年,收敛间隙的静压机械密封配合接触式机械密封,同样成功解决了该矛盾。1963年至1969年,核工业的发展使得这两种机械密封大量应用。机械密封的psV值水平被提高到167~267 MPa·m/s[6]。
(5)零泄漏非接触机械密封。1925年,螺旋槽轴承便被构思出来。如图4所述,螺旋槽轴承高速运动时,带动粘性气体从轴承外部流向旋转中心,气体沿径向先后流经槽台区与密封区;在槽台区,气体沿周向周期性地流过槽区与台区,从而产生对止推承载力至关重要的阶梯动压效应,阻止了止推轴承与转子的摩擦[7]。1947年惠普尔解释了其工作原理,1964年穆德曼给出其理论计算方法,1968至1989年,约翰克兰公司先后研制出圆弧面螺旋槽非接触机械密封、平面螺旋槽非接触机械密封、28型干运转气体密封、2800和2800E系列干运转气体端面密封产品[6]。
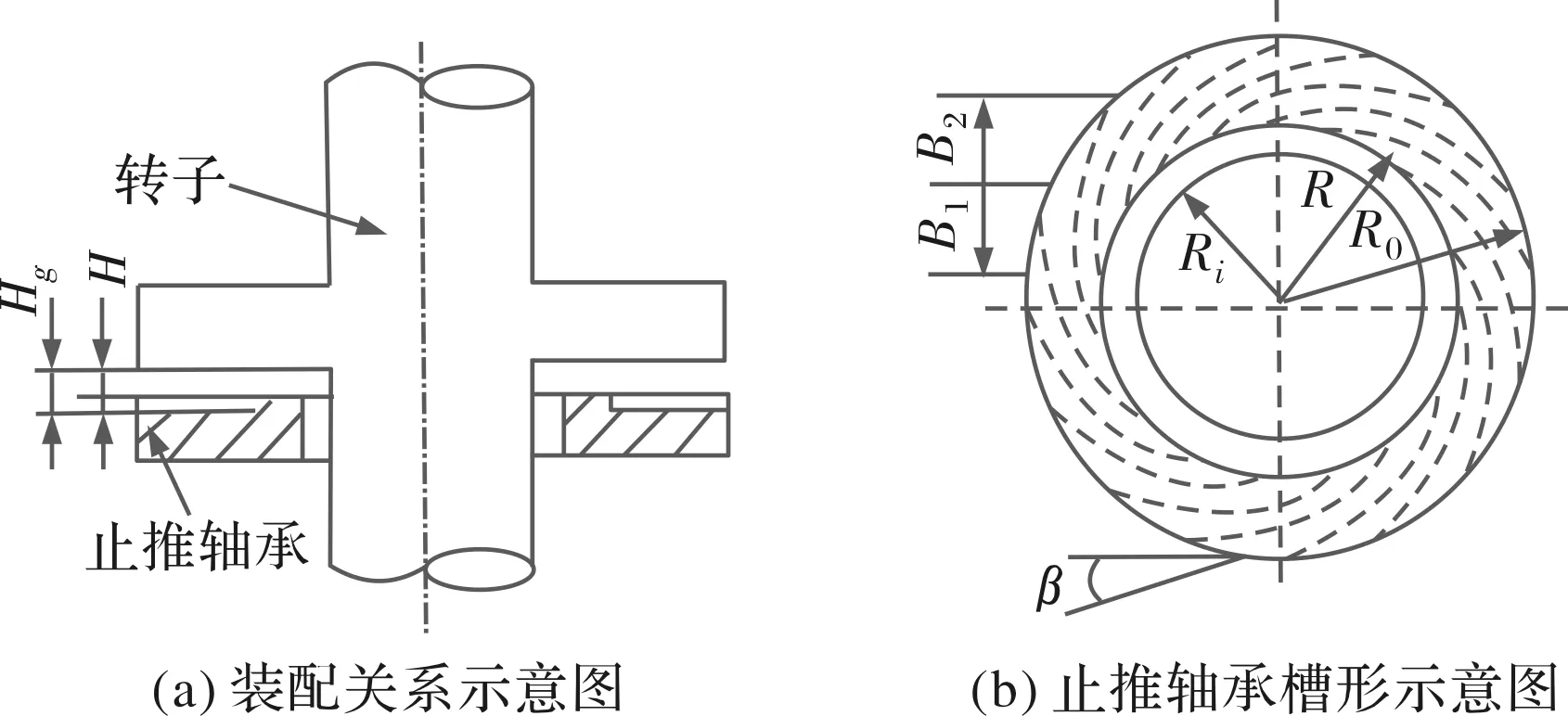
图4 螺旋槽止推轴承示意图
在干运转气体端面密封成熟发展的启发下,以色列爱特逊教授于1984年发明了适用于液体的圆叶槽非接触机械密封。该机械密封设计利用表面改形手段在密封端面上开圆叶浅槽。当其运转时,流体动压产生的剪切流使泄漏流体送回高压侧。相对于移植类似技术的价值而言,更具有价值的是爱特逊创造性地提出当压差造成的泄漏流量等于流体动压送回的剪切流量时,非接触密封可以达到零泄漏。显然该构思比组合型机械密封更高明,它使得非接触机械密封不需要接触式机械密封的协助也能独立地减小泄漏甚至彻底控制泄漏。
1.6 机械密封检测技术
随着电子技术的发展,人们构思借助电气手段来帮助我们认识机械密封。1988年起,电气手段开始被引入到机械密封,压电传感器[8]、电阻应变仪[9]和声发射仪[10]分别被用于检测机械密封的膜压、摩擦特性、状况与振动。这些检测技术为机械密封的研究与状态控制提供了更多信息基础。
2 国内机械密封技术
国内对机械密封的研究起步较晚,从第一五年计划开始,在国家机械部、石油部和化工部的组织或引导下,我国机械密封技术大致经历了五个阶段。
2.1 试制阶段
1950年3月,沈阳第六机器厂(沈阳水泵厂的前身)计划科设计部,整理水泵通用零件时,初步形成了对机械密封的认识。1956年,苏联先进生产者到各地传播经验,促使了兰州炼油厂、沈阳水泵厂等单位开始试制泵用机械密封。1960年,顾永泉开始研究机械密封,并在炼油厂推广机械密封。1966年,天津机械密封件厂开始生产机械密封[5]。
2.2 标准制定阶段
1970年机械工业部、石油部、化工部所属科研、生产、使用单位组成联合设计组,参考国内外先进结构,联合设计了“泵用机械密封系列”,1973年化工部所属单位组成联合设计组完成了“釜用机械密封系列”设计工作[5]。1975年,机械工业部批准颁发了“泵用机械密封标准”(JB1472-75)[5]。
李秋光认为自己是幸运的,这种幸运不仅体现在完整经历了改革开放40年深圳印刷业巨变,更体现于见证了一代代印刷人的崛起。
2.3 紧追阶段
“五·五”期间机械工业部组织了将机械密封的新材料攻关作为100项基础件攻关的一项。通过攻关发展了耐腐蚀密封及密封用氮化硅,碳石墨等新材料。1977年建立了以生产氮化硅陶瓷密封环为主的浙江奉化机械密封件厂[5]。1978年化工部批准颁发了“釜用机械密封标准”(HG5-748-78;HG5-751~756-78)[5]。
2.4 引进进口产品阶段
改革开放之后,我国进行经济体制改革,充分接触国际市场,机械密封产品和理论进一步发展。
为了加速密封技术的发展,1980年以后陆续引进了英国Crane Packing有限公司、美国Sealol公司的普通型机械密封,西德Burgmann公司反应烧结碳化硅密封环。“六·五”期间密封技术被列入国家重点科技攻关计划。通过攻关、消化引进技术及成套进口装置中的密封件,使机械密封在品种、材料、技术参数等方面都提高到一个新的水平、部分产品已接近国外先进水平。但是与国外同类产品相比仍有不少差距,如密封机理研究不足、制造技术落后、密封材料种类少等。
2.5 理论完善阶段
为解决密封机理研究不足问题,1981,年姚兆生、许仲枚、王俊德等译著了西德E·迈尔的《机械密封》,该书在我国推广了机械密封的理论传播。
1987年,李继和、蔡纪宁、林学海等人合著了我国第一本关于机械密封的专著《机械密封技术》。
在1988年,顾永泉的“加强密封科学管理,提供密封技术水平”讲义[11]里紧跟先进技术,介绍了零泄漏和零逸出技术。1990年至2001年,顾永泉陆续出版《流体动密封》《机械端面密封》和《机械密封实用技术》三本专著,全面而详实地讲述了机械密封技术。
至此,我国机械密封学已沉淀了坚实的理论基础。
3 机械密封技术的协同发展期
3.1 剖分式机械密封与集装式机械密封
人们在对比金属焊接波纹管与普通机械密封,发现前者在装配、拆卸、维护、更换方面极大地方便了使用者。于是对其他机械密封提出了同样的需求。
针对这一需求,出现了两种设计思路。一种是将机械密封设计成剖分式,该思路源于轴承的设计经验——将轴承盖设计成剖分式可以极大地方便轴承的维护。另一种是将机械密封设计成集装式,该思路源于模块化设计,类似于编程语言中的类与对象的作用,将机械密封作为一个模块来处理。
实践证实,第一种设计思路遭遇了较大的困难,剖分式机械密封在很长时间内未能成功用于实践,即使开始应用后也被局限在一个很窄的使用范围内[12][13]。而集装式机械密封,则很快成功应用[14-16]。它不仅方便使用者维护,而且帮助了设备设计单位进行了工作任务分解,划清了设备整体设计与机械密封设计的界限。也因此受到更多方面的支持,得到了更广泛的欢迎和应用。
3.2 机械密封检测与自动控制技术
前文提到,1988年起各种电气检测手段在国外开始被用于机械密封。在国内,上世纪90年代,我国学者也做出了相关研究。刘克旺等[15]对压电薄膜传感器的制作和静态标定方法及误差分析。毛绍贝[16]等提出了基于温度反馈控制的机械密封方法。
增加检测手段,一方面使得理论研究和生产实践获取了更多可靠的数据;另一方面驱动了机械密封的自动化控制技术的发展。
顾永泉等[17]研制了相态检测密封系统,并在某炼油厂通过改变冲洗量来控制密封面流体膜相态。江苏大学[18]陈汇龙等在非接触式机械密封上安装位移传感器来检测密封端面间隙,并设置磁力线圈。当间隙小于1.5 μm时,改变电流使密封端面产生相斥力,使间隙增大;当间隙大于5.5 μm时,改变电流使密封端面产生吸引力,使间隙减小,从而维持间隙在合适的大小。东台市光明机械密封有限公司的[19]的赵恒勇在非接触机械密封上设计了与静环相连的控制环,控制环与多个可以通过气压控制伸缩的伸缩杆相连。改变气压大小,可以改变伸缩杆的伸缩量来改变密封间隙。
3.2 机械密封故障分析
关于机械密封故障分析,我国崇尚广泛实践基础上获取的经验。其代表人物有中油抚顺工程建设有限公司职工赵林源。赵林源在机械密封故障处理领域有杰出的贡献,被工人日报称为“密封大王”[20],于2008年获得国家科技进步奖二等奖[21],于2009年出版《机械密封实用方法与技巧》,于2011年出版《机械密封故障分析100例》。另外,王永[22]、高武民[23]、王志强[24]、罗川西[25]、王作恒[26]等讨论了机械密封的故障分析与排除方法,先后讲述了各自的实践经验;卢海冰[27]、马斌良[28]等人研究了机械密封的改造方法;李枫[29]等人研究了机械密封修复中的研磨工艺。
西方人则更重视方法和数据。例如法国CFR Total公司Michalis P.M.M.提出故障树分析方法[30]。故障树法,简称为FTA法,是在系统设计过程中通过对系统故障的各种因素(包括硬件、软件、环境、人为因素)进行分析,画出逻辑框图(即故障树),借此确定系统故障原因的各种可能组合方式或其发生概率,从而计算出系统故障概率原因的各种可能组合或其发生概率,从而计算出系统故障概率并据此采取相应的解决措施,以提高系统可靠性的一种方法。它类似与当下流行的思维导图,可以帮助人们在多重因素作用下处理混乱局面。不同的是故障树法有思维导图无法比拟的概率计算的量化手段,更加科学。
3.4 机械密封表面改进技术
图尔德胡勒·阿不都拉[31]等讨论了端面密封的研究现状,认为动压效应和泵送效应依然是端面密封技术的研究重点。事实也证实了,作为最先进的机械密封,采用表面改形技术的非接触式机械密封依然是研究的热点。当下对其的研究大致也分了两个方向。
一个方向是设法在密封端面使用表面改形技术做出更佳的槽形,更有效地利用流体的静压效应与动压效应。例如浙江大学的彭旭东等[32]提出一种柱状微凸体织构高度呈现三维波度分布的端面结构,认为其比传统的热动力楔能产生更强的流体动压效应,能显著提高密封可靠性、延长使用寿命。江西省科学院的程香平[33]等提出一种具有各自孔型与三维雪花状槽形相结合的端面结构,认为其可流体产生导流与汇集功能,可以产生极强的动压效应与静压效应,并显著提高液膜的稳定性、动压开启特性和变压适应调节能力。
另一个方向是对其作用机理进行深入更深入的剖析。例如新疆大学的陈志等[34]对收敛性、直角形和发散性3种形式的T型动压槽建立几何模型,并对液膜流场进行了数值分析,发现三种槽形的端面液膜压力分布规律相同,端面液膜压力均在左侧槽底部达到最大值,且动压槽两侧具有明显的压差,能够产生明显的动压特性;3种槽形结构的开启力和泄漏量均随着转速和压力的增大而增大,其中压力对密封性能的影响相对于转速对密封性能的影响较大;发散形槽比直角形和收敛形槽具有更强的动压特性,且拥有较高的开启力和较低的泄漏量,从而具有较好的密封性能。兰州理工大学的王朝亚等[35]以螺旋槽上游泵送机械密封为研究对象,用有限差分法离散Reynolds方程,基于轴向力平衡条件作为迭代收敛准则,采用逐次超松弛迭代(SOR)法在Mathematica软件中编程求解液膜压力分布,以及相关密封特性参数,并分析不同工况参数与结构参数对密封特性的影响。研究结果表明:泵送率随进口压力的增加呈非线性减小,随转速槽深、槽长坝长比的增加呈非线性增大;液膜摩擦因数随着转速的增加近似以线性方式增大,随进口压力、槽深、槽 长坝长比的增加呈非线性减小;随着螺旋角的增大泵送率先增大后减小,而液膜摩擦因数表现出与泵送率相反的趋势,说明螺旋角存在最优值;相比于结构参数对密封特性的影响,工况参数的影响较大。
4 未来展望
(1)更深入的理论研究将会围绕机械密封中涉及的摩擦学、流体静力学和流体动力学等而进行,尤其借用计算机的理论计算和三维仿真计算将会被大量应用,将更深入地揭示其本质,并发现更多的运行规律。
(2)信息化将使机械密封更方便地被监测,未来将可以远程监测机械密封的运行状态。
(3)自动化控制手段将会被更多的应用于实践,为智能化打造基础。