考虑疲劳载荷的风电场分散式频率响应策略
2022-04-14杨伟峰文云峰迟方德张武其
杨伟峰,文云峰,李 立,王 康,迟方德,张武其
(1. 湖南大学 电气与信息工程学院,湖南 长沙 410082;2. 国网陕西省电力公司电力调度控制中心,陕西 西安 710049)
0 引言
随着风电渗透率提高,由风机运行特性造成的电网惯量低、调频能力弱等特征致使电网中频率稳定性问题逐步凸显[1]。为维持高比例新能源电网的安全稳定运行,调度机构一般需要充裕的备用容量,这将导致弃风等问题发生[2]。为适应大规模风电并网和消纳需求,电力公司正逐步提高风电并网标准,要求风电场具有一定辅助调频能力。为使风机具备类似同步机组的频率响应能力,基于变速型风机的虚拟惯量、下垂控制等策略被大量提出。这些策略通过采集电网频率特征,调节风电场整体或单机出力状况,使其参与系统调频[3-5]。然而,风机属于疲劳器械,参与调频将导致风机出力变化频次及幅度增加,使其机械部件承受由风波动引起的交变载荷外,还将承受由出力变化引起的疲劳载荷,从而加快材料缺陷积累,增加疲劳损伤,缩短使用寿命[6-7]。
为减小风电调频过程中造成的疲劳载荷,国内外学者已开展大量研究。文献[8]依据风电场内风机的有功备用容量进行比例控制,用于代替传统启停机控制方法。由于该方法简单有效,目前许多风电场均基于该策略参与调频。文献[9]由风机动力学模型构建含疲劳载荷的状态空间方程,并结合适用于多输入-多输出优化问题的模型预测控制(MPC),协调各风机的桨距角和电磁转矩,来降低风电场调频时产生的疲劳载荷。但由于该方法属于集中式优化策略,针对现代大型风电场内可能包含成百上千台风机的实际情况,该策略将面临优化模型矩阵维度急剧上升、中央控制器计算压力大幅增加等问题[10]。为进一步提高风电场优化问题的计算效率,用于解决风电场内优化问题的分散式控制策略被提出[11-13]。其中,文献[11]提出一种基于疲劳载荷敏感性的分布式有功控制方法,通过在本地控制器中并行求解各风机疲劳载荷灵敏度系数,协调风机有功出力。文献[12]和文献[13]分别基于适用于分布式最优控制问题的交替方向乘子法(ADMM)与和增积减法(AIMD),将集中优化问题分解为多个子问题,通过风机的本地控制器并行计算,快速求得风电场调频过程中风机出力的最优解。
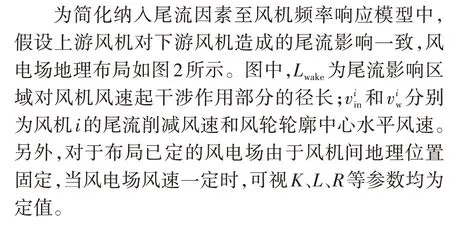
尾流效应是风电场上游风机产生的尾流轨迹对下游风速造成削弱影响的现象,随着上游风机出力变化其尾流干涉效果也将改变[14]。当风电场参与调频改变上游风机出力时,下游风机除因调频变化出力而引起疲劳载荷外,还将受到由尾流效应引起的另外一种疲劳载荷的影响。目前与疲劳载荷优化相关的优化控制策略均未将尾流因素考虑在内,这会导致风电场疲劳载荷的实际优化效果有所降低。
本文提出一种考虑疲劳载荷的风电场分散式频率响应策略,旨在维持风电场调频性能的同时,考虑风电场内尾流效应,降低调频过程中由风机出力变化和风机尾流波动造成的总疲劳损伤。首先分析了风电场调频控制及其有功控制的结构,推导了风机线性动力学模型,并结合MPC 策略构建考虑疲劳载荷的单机频率响应模型。基于Jensen尾流模型推导了风机出力与尾流引起疲劳载荷间的线性关系,并结合单机模型构建考虑疲劳载荷的风电场频率响应模型。为减少风电场中央控制器计算压力,基于目标级联分析法(ATC)将该集中优化问题拆分成主问题和多个子问题放置在中央控制器和本地控制器中,形成分散式的频率响应策略,通过多个控制器并行计算实现对调频风机出力的协调。最后,基于改进的含80 台单机容量为5 MW 双馈风机的IEEE RTS-79系统对所提策略进行了仿真验证。
1 风电场调频及有功控制结构
1.1 风电场调频结构
风电场参与电网调频时须主动改变的有功出力参考值ΔPfarm可通过将其并网点频率变化率及频率偏差量分别代入虚拟惯量响应与下垂响应这2 个环节计算确定[15],如式(1)所示。

式中:Kvi和Kp分别为虚拟惯量和下垂系数;fm和f0分别为实际频率和额定频率;t为时间变量。
1.2 风电场有功控制结构
2 考虑疲劳载荷的单机频率响应模型
2.1 风机动力学模型
风机动力学模型是推导风电调频时有功出力与疲劳载荷间解析关系的物理基础[16]。根据其传动轴上的转矩平衡关系,可基于风轮和发电机2 个具有转动惯量的质量块描述含风轮角速度ωr和发电机角速度ωg的动力学方程。其中风轮动力学方程为:

式中:Tf为低通滤波器时间常数。
2.2 风机疲劳载荷模型
在风电场调频过程中,风机产生的疲劳损伤主要来源于2 类载荷[17]:第一类为传动轴上形变扭矩Ts,由于风机调频可能连续改变电磁功率,并且风轮机械功率随风速的变化而变化,此时引起的轴转矩不平衡状况将导致材料微裂纹积累;第二类为风机塔筒底部弯矩MT,由风轮平面传递至塔筒的水平循环推力将引起塔筒点头动作,而风机调频过程可能会放大塔架振幅,甚至造成风机坍塌事故。
根据文献[12],形变扭矩Ts可通过传动轴形变量θs及传动轴刚度Ks进行量化:

塔筒底部弯矩MT可通过计算风机轴向推力系数Ct近似求得:

式中:Ht为风机塔高。为建立Ts和MT与风机有功输出参考值增量ΔPref间的线性解析关系,用于后续建立风机频率响应模型,在此将式(8)、(9)转化为增量式结构,分别如式(10)、(11)所示。
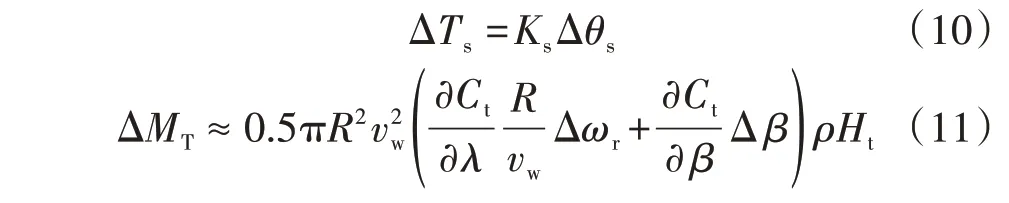
式中:ΔTs、ΔMT、Δθs、Δωr、Δβ分别为Ts、MT、θs、ωr、β的增量,且Δθs、Δωr、Δβ的增量式结构可根据式(2)—(7)转化得到,转化过程见附录A 式(A1)—(A7)。由于叶片气动特性决定了Ct与λ和β间为非线性关系,本文在此通过查表法对该非线性部分进行线性化处理[11]。接着,基于连续状态空间方程结构和采样周期T,结合式(10)、(11)及动力学模型增量式结构可建立含有功与载荷因素的风机增量离散状态空间方程,如式(12)所示。

式中:X为状态向量;u为控制器的输入向量;Y为输出向量;q为步长;Ad、Bd、C、Ed分别为状态系数矩阵、控制系数矩阵、输出状态系数矩阵和常系数向量,其具体表达式见附录A式(A8)—(A12)。
2.3 基于MPC的单机频率响应模型
MPC由于具有在线滚动优化特性及解决多约束优化问题的能力,其在风电控制方面也极具应用潜力[18]。为通过控制某时间尺度下输入向量u,实现对更长时间尺度下风机疲劳载荷的优化。本文采用MPC 策略建立含疲劳载荷的单机频率响应模型,具体过程如下。
1)基于MPC 策略,对式(12)所示风机增量离散状态空间方程进行扩展,用于估计M个控制步长输入向量u在未来Np个预测步长下的系统输出向量Y。
2)采用MPC 策略建立含载荷的单机频率响应模型,如式(13)所示。


3 考虑疲劳载荷的风电场频率响应模型
由式(13)可见,若对单机调频过程中产生的疲劳载荷进行抑制,则势必会造成风机实际出力偏移参考值,从而影响其调频性能。为解决该问题,本节从单机频率响应模型出发,同时考虑调频过程中由尾流效应引起的疲劳载荷,并通过对轴向推力因子的线性化,构建场站层面的频率响应优化控制模型。
3.1 风电场尾流模型
当风机运行时,水平自由风在经过风轮被吸收部分能量后,将在风电场下游区域形成一个尾流干涉区域,对风电场下游区域的风速造成影响。由式(2)、(3)、(9)可知,当风机vw受尾流波动影响变化后,其Ts和MT也将发生变化。为构建含尾流模型的风机疲劳载荷模型,首先需推导风机出力、尾流与疲劳载荷间的解析关系。丹麦Riso 实验室提出的Jensen 尾流模型中,假设风经风轮后的尾流轨迹在该风机扫掠面积基础上呈锥形扩张趋势,对下游风速造成影响,并随着水平距离的增加,该尾流轨迹对周围自由风速的影响也将逐渐衰减[14]。
根据文献[14],在Jensen 尾流模型中,当上游风机产生尾流区完全覆盖下游风机扫掠面积时,扰动系数δv可基于上游风机轴向推力系数Ct表示为:

式中:L为上游风机至尾流影响区域的水平距离;K为尾流衰变系数;D为尾流影响区域直径。
由于本文主要研究高风速场景下风机调频造成的疲劳载荷,且风机在参与调频前需预留一定的有功备用,故风机叶尖速比λ较小而桨距角β较大。根据附录B 图B1 所示美国国家可再生能源实验室容量为5 MW 双馈风机模型的轴向推力系数参考值,在该运行场景下Ct总位于0和1之间[16]。而由文献[17]可知,当Ct<1时贝茨理论有效,对轴向推力因子a具有小于0.5 的约束条件,故可推得系数Ct与a间的解析关系为:
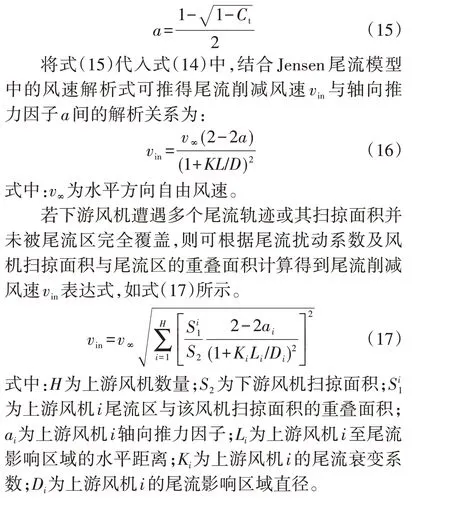
基于上述假设,由式(17)可进一步推出风机出力变化引起的轴向推力因子增量Δa与下游尾流削减风速衰减量Δvin间的关系式为:

式中:S1为上游风机尾流区与该风机扫掠面积的重叠面积。根据式(2)、(9)容易推断,无论尾流波动引起下游风机轮毂处风速增加还是减少,只要风速变化即会在风机传动轴和塔筒上附加一个载荷增量。
为有效降低风电场调频时由尾流波动产生的载荷,需将与尾流相关的轴向推力因子增量Δa也纳入风机状态空间方程中,建立频率响应模型。为得到Δa与式(12)中风机状态量间的线性关系,本文基于Cp、Ct查表法和定理a=Cp/Ct,得到式(19)所示Δa与Δωr、Δβ间的线性关系。

由式(3)、(9)、(18)、(19)可得Δωr、ΔMT与Δa间的线性关系,并在状态变量中加入Δa后,式(12)变为X′(q+1)=A′dX′(q)+B′du(q)+E′d、Y(q+1)=C′X′(q)。Δωr、ΔMT与Δa间的线性关系及各矩阵具体内容见附录C式(C1)—(C8)。
3.2 考虑尾流与载荷因素的风电场频率响应模型
基于更新后的状态空间方程,本节将构建以风电场有功出力参考值ΔPfarm为等式约束的风电场频率响应模型,并转化为二次规划问题。
根据图2 所示风电场中N台风机的地理布局,此时风电场的离散状态空间方程可表示为:
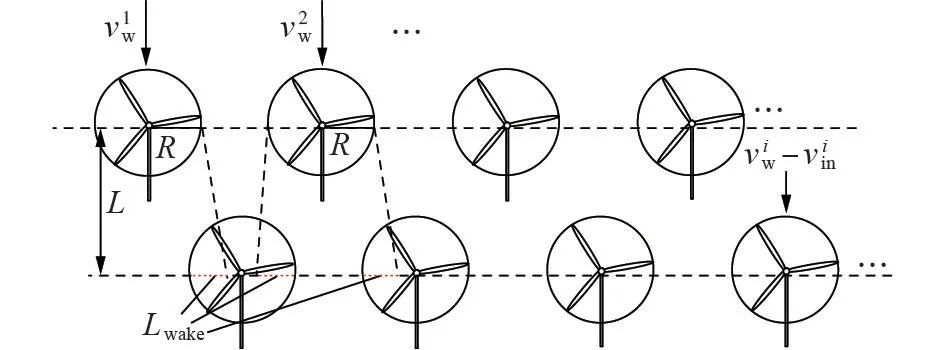
图2 风电场地理布局Fig.2 Geographical distribution of wind farm

式中:Xw、Yw、uw、Aw、Bw、Cw、Ew的表达式见附录C 式(C9)。基于MPC 对式(20)进行展开,以构建考虑疲劳载荷的风电场频率响应模型目标函数,如式(21)所示。
在设计螺旋结构时,在进料口端应将螺旋轴上的螺旋叶片布满,可预防进料口内侧形成饲料的堆积而形成板结,还能有效地防止粉末料由螺旋输送器端盖缝隙中溢出而造成轴承的腐蚀;在出料口端,进料口和出料口的两个内侧面之间应至少大于1.5个螺旋节距,以防止螺旋停止转动后,进料口和出料口之间未被螺旋叶片完全封闭而造成漏料现象。为了达到较高的下料精度,螺旋加工时需合理控制其误差,本设备选用连续冷轧螺旋叶片,在小批量生产时,也可直接车削加工。
式中:ui为风机i控制器输入向量;ΔPfarm为调频时风电场须主动改变的有功出力参考值向量;P0e,i为风机i当前有功出力;Pmin,i和Pavi,i分别为风机i基于当前运行状态和约束计算得到的最小和最大出力。式(22)所示约束条件可保证风电场在优化疲劳载荷且维持调频性能的同时,使各风机执行的出力命令不会超过其能力范围。
而由于控制目标与控制变量uw间为线性关系,故可将其转化为基于uw的二次规划问题进行求解。将目标函数式(21)放入紧凑型二次规划结构,可得风电场频率响应模型数学模型为:

式中:f(x)为风电场的优化目标函数;x=[uw(1),uw(2),…,uw(N)]T,表示风电场中央控制器输入向量,其维度为NNp×1;H和g的维度分别为NNp×NNp、NNp×1,其中H为半正定对称矩阵;x″、x′分别为有功控制器输入向量x的上、下限约束,可基于各风机运行状况得到;Aeq和beq为风电场中央控制器输出向量的约束,其表达式见附录C式(C10)。
4 基于ATC的风电场分散式频率响应策略
根据图1 中本地控制器上传的风机数据,风电场可基于其中央控制器对式(23)中的二次规划问题进行求解得到各控制周期下各风机有功出力参考值,减小风电场调频时产生的疲劳损伤。然而,大型风电场投建规模可达数百甚至上千台风机,这将使得该二次规划模型中包含高维矩阵,导致中央控制器计算压力增加,计算效率下降,进而无法满足风电场控制的快速性需求。

图1 风电场有功控制框图Fig.1 Block diagram of active power control for wind farm
为了有效提升风电场频率响应优化模型的求解速度,本节基于适用凸优化计算的ATC 对式(23)所示集中式优化问题进行重构,相较于ADMM 和AIMD,该算法在该应用环境下具有控制精度更高且结构适应性更强的优点[12-13,19]。基于ATC,第3 节中建立的风电场频率响应模型可被分解为1 个中央控制器主问题和多个本地控制器子问题,形成分布式计算求解的结构。该算法在根据子问题目标函数求得多个局部最优解的同时,可通过主问题目标函数对各子问题计算结果进行协调。通过主问题与子问题间每次迭代结果的共享及目标函数中算法乘子的更新,最终得到满足全局的最优解。由于该风电场优化问题经分解后,所得子问题部分的局部最优解可通过风机本地控制器并行计算得到,故可有效分流中央控制器计算压力,加快优化问题求解速度。该分散式控制策略构建过程如下。
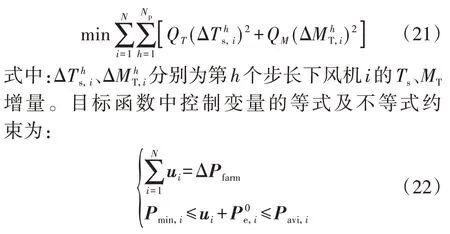
将式(23)分成多个子问题,如式(24)所示。
式中:fi(xi)为风机i的优化目标函数;xi为风机i本地控制器输入向量,其维度为Np×1;Hi和gi的维度分别为Np×Np、Np×1;Ai和bi分别为风机i的有功出力等式约束的矩阵和向量,其维度分别为Np×Np和Np×1;x″i、x′i分别为风机i本地控制器输入向量xi的上、下限约束。
式中:μ为预置常数;a和β初值通常较小。在迭代过程中,同时满足式(28)、(29)时可视作算法收敛。
式中:ε1、ε2为预先设置的精度系数。
该风电场分散式频率响应策略的具体实现流程如附录D 图D1 所示。对于该分散式频率响应策略初次迭代时需要的风机有功输出参考值增量,本文依据有功备用容量进行比例分配的原则,根据各风机有功备用,将调频时风电场须主动改变的有功输出参考值ΔPfarm按比例分配至各风机用于响应系统的频率变化,如式(30)所示。
5 仿真验证
5.1 测试系统
在MATLAB/Simulink 中搭建了IEEE RTS-79测试系统,并在节点1 上接入含80 台单机容量为5 MW双馈风机的双馈风电场,验证所提控制策略的有效性。为了便于建模,将风电场内每10 台风机视为1 个机群,进而风电场被划分为机群SWT1—SWT8,并假设各机群中风速以及各风机的出力均相同。各机群的地理布局与图2 一致。设风电场中SWT1—SWT4为上游机群,SWT5—SWT8为下游机群。并设风电场频率响应控制策略的控制周期T为0.5 s;MPC 控制步长M和预测步长Np分别为1和10。
5.2 控制效果
测试系统仿真时长共100 s,仿真期间风轮轮廓中心水平风速在12~18 m/s间波动,见附录D图D2。在系统出现扰动前,风电场出力恒定,系统频率稳定在50 Hz。当仿真进行至60 s时,系统发生机组跳闸事件(出力减少量为16.9 MW,约为总容量的2.6%),造成系统频率跌落,并触发风电场调频动作。
为体现分散式控制策略的调频及载荷优化的独特优势,将其仿真结果与比例式控制策略和集中式控制策略进行对比,如图3 所示。图中,无附加控制策略指风机采用定功率控制策略而不响应外部频率变化。由图可见,风电场参与调频可有效改善系统频率的变化率和偏差量。对比各策略的调频性能:比例式控制策略下系统频率的稳态偏差和波动幅度更小,效果最优;集中式控制策略和分散式控制策略也可有效改善系统频率最低点,且与比例式控制策略效果基本一致,仅在稳态阶段略有不足。
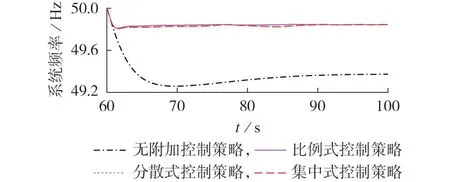
图3 不同控制策略下的频率特性Fig.3 Frequency performance under different control schemes
在风电场参与调频时,由于风电场处在高风速场景下,各机群均具备额定出力能力,使得由中央控制器按机群有功备用比例下发的有功出力参考值增量近乎一致,如附录D 图D3所示。而集中式控制策略和分散式控制策略则可在风电场调频时,根据各机群运行状况和实际风速,量化机群因出力变化造成的Ts、MT疲劳载荷,并通过8个机群调频过程中出力的实时协调,降低风电场的疲劳载荷。由于场内风速波动幅度大,故基于频率响应策略求得的机群有功出力参考值在时域上变化明显。另外,基于分散式控制策略优良的收敛性,利用该策略所得机群有功出力参考值与集中式控制策略下所得结果近乎一致,如附录D图D4、D5所示。
为了进一步对比各控制策略下风电场的疲劳载荷,本文依据仿真时段60—100 s 间各风机的Ts、MT载荷进行等效疲劳载荷计算和雨流循环计数分析。基于3 种控制策略下各机群的Ts、MT等效疲劳载荷计算结果分别见表1、2。
基于表1 可知:相较于比例式控制策略,风电场在集中式控制策略和分散式控制策略下造成的Ts等效疲劳载荷分别下降了9.65%和9.41%;且机群SWT4的降载效果最为显著,相较于比例式控制策略,基于集中式和分散式控制策略下机群SWT4的Ts等效疲劳载荷分别下降了53.60%和52.55%。图4 为各控制策略下机群SWT4传动轴上Ts的时域曲线和雨流循环计数结果。由图4(a)可知,在[78,100]s时间段,相较于比例式控制策略,集中式控制策略和分散式控制策略可有效减缓机群Ts的波动状况。由图4(b)可知,相较于比例式控制策略,虽然在集中式与分散式控制策略下Ts的雨流循环次数有所增加,但该载荷的变化量也大幅减小,说明集中式与分散式控制策略对风电场Ts疲劳载荷有一定优化作用。
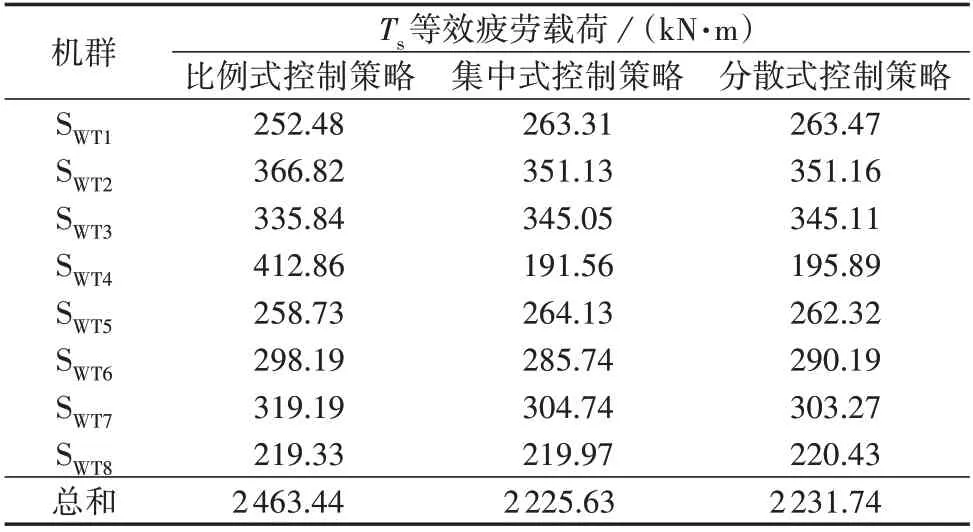
表1 不同控制策略下的Ts等效疲劳载荷Table 1 Equivalent fatigue load of Ts under different control schemes
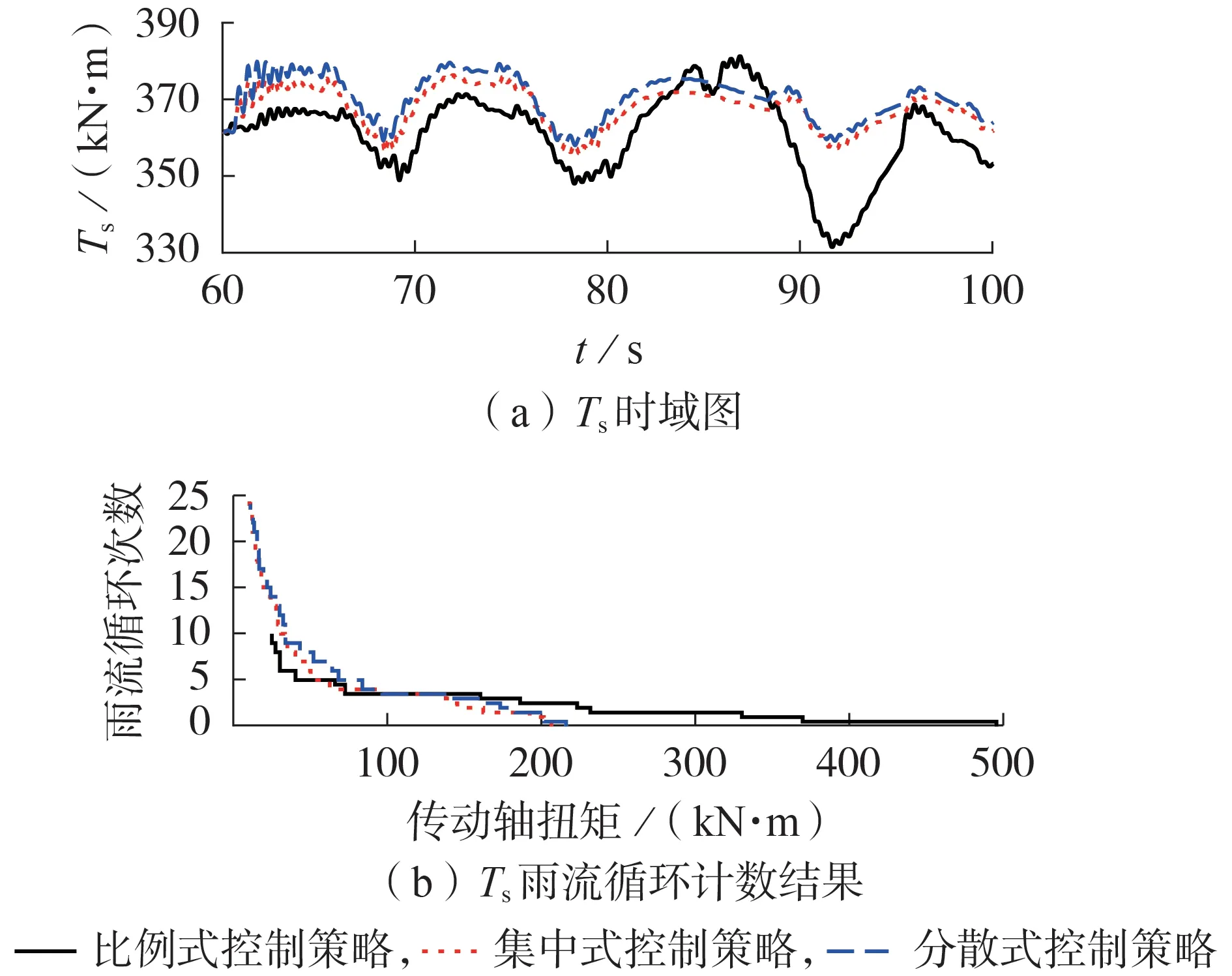
图4 SWT4的Ts仿真波形Fig.4 Simulative waveforms of Ts for SWT4
由表2 可知:在集中式控制策略和分散式控制策略下,风电场为了降低由机群SWT4风速变化造成的疲劳载荷,增加其有功出力的变化频率及幅度,造成的尾流效应,进而导致下游机群SWT7、SWT8的等效疲劳载荷略有增加,但下游增长的等效疲劳载荷较机群SWT4减少的疲劳载荷小;机群SWT1、SWT3通过调节有功出力参考值实现自身疲劳载荷优化的同时,综合尾流效应影响,使下游机群SWT5、SWT6的疲劳载荷略有降低,最终实现风电场整体MT等效疲劳载荷下降。相比比例式控制策略,集中式控制策略和分散式控制策略下的MT等效疲劳载荷分别下降了9.60%和9.40%。其中,机群SWT4的等效疲劳载荷优化效果最为显著,分别达到51.40%和51.05%。图5为各控制策略下机群SWT4的MT时域曲线与雨流循环计数结果。由图5(a)可见,基于集中式控制策略和分散式控制策略下机群SWT4的MT变化幅度在[80,90]s时间段下降明显,这说明机群SWT4等效疲劳载荷有所减少。同样,根据图5(b)所示机群SWT4的MT雨流循环计数结果,虽然基于集中式控制策略和分散式控制策略下机群SWT4的MT雨流循环次数不发生改变,但MT的变化幅度下降明显,也可说明集中式控制策略和分散式控制策略对机群塔筒具有优化疲劳载荷的作用。
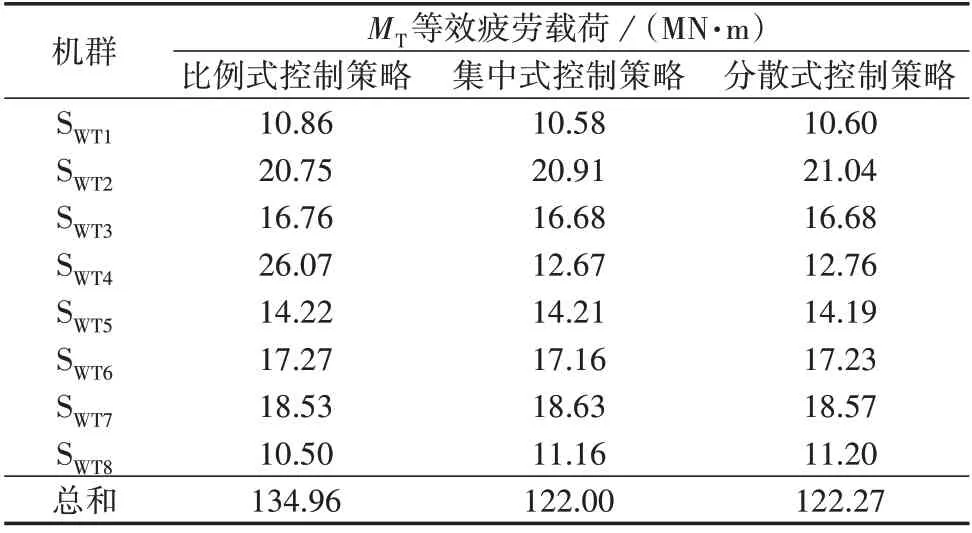
表2 不同控制策略下的MT等效疲劳载荷Table 2 Equivalent fatigue load of MT under different control schemes
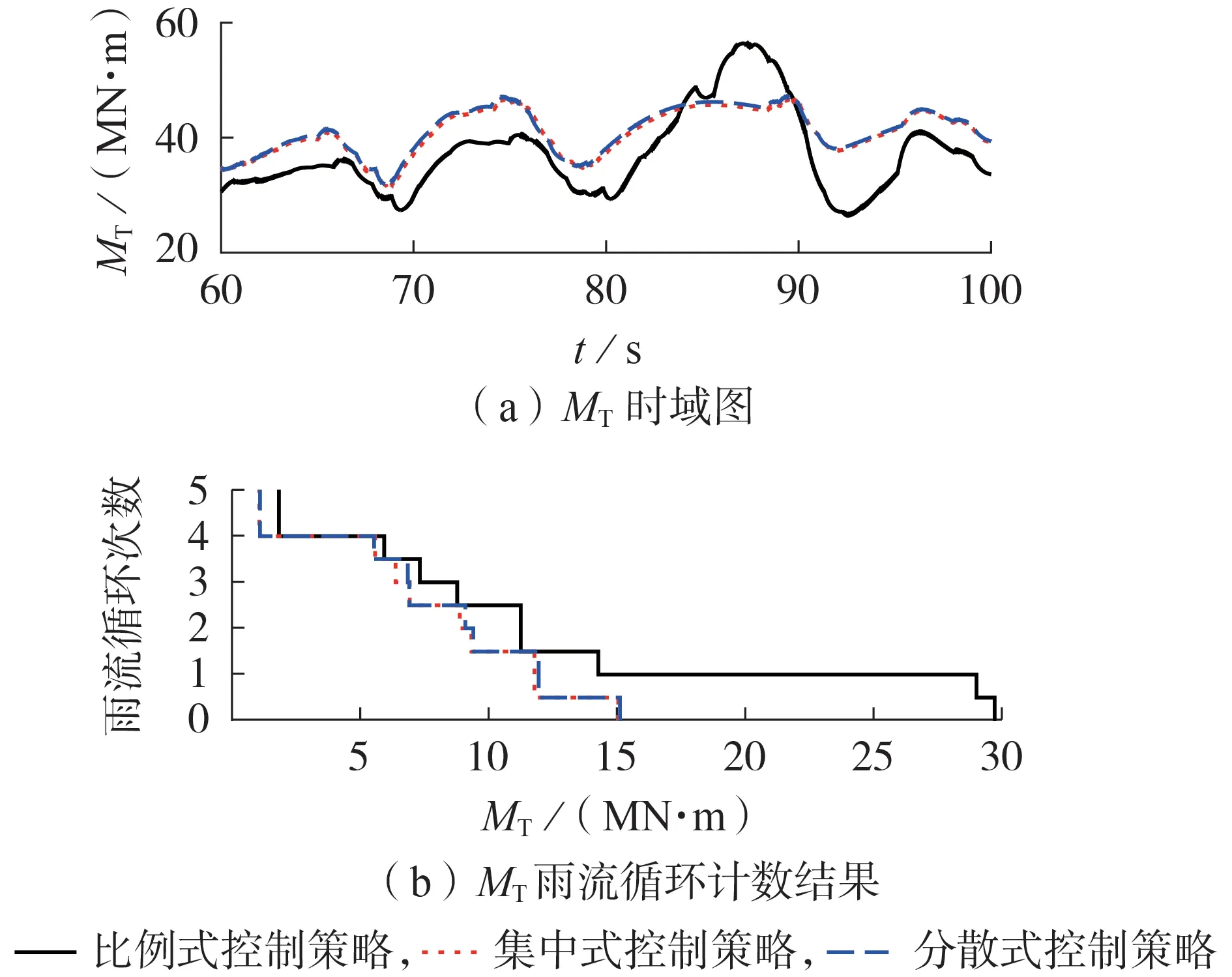
图5 SWT4的MT仿真波形Fig.5 Simulative waveforms of MT for SWT4
为了说明分散式控制策略的效率优势,在此采用与文献[13]相同的效率对比方法,通过累加单个控制周期内中央控制器、本地控制器单机最长耗时以及集中式控制策略计算时长,与分散式控制策略的总时长进行比较,计算效果对比如表3 所示。由表可知:在分散式控制策略下,含80 台容量为5 MW的双馈风机的风电场控制效率可提升28.13%;并且随着风机数量的增加,分散式控制策略计算效率提升效果更为明显。
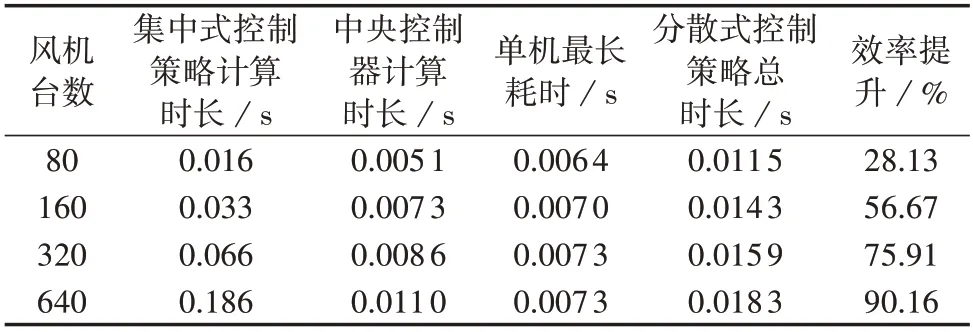
表3 计算效果比较Table 3 Comparison of calculation effect
6 结论
本文针对风电场参与调频引起其风机疲劳载荷增加的问题,提出一种考虑疲劳载荷的风电场分散式频率响应策略。该策略可在维持风电场调频性能的同时,基于风机出力变化、场内尾流波动以及风机增加疲劳载荷间的线性关系,协调各风机出力,减少风电场调频时产生的疲劳损伤。并且由ATC 将该场站频率响应优化问题分解为主问题和多个子问题,可在分流中央控制器计算压力的同时,维持调频和载荷优化性能,为大型风电场频率响应过程的优化提供方法。
为使分散式控制策略更具有实际工程价值,后续将基于多台计算机并行/分布式计算的实验环境研究分散式控制策略的具体部署、实现方式和有效性,为大型风电场应用分散式控制策略提供硬件与通信控制方面的参考。
附录见本刊网络版(http://www.epae.cn)。