双馈风力发电机组惯量阻尼特性与改进附加频率控制策略
2022-04-14雷添翔律方成刘教民
雷添翔,律方成,刘教民,张 雷,周 倜,包 鑫
(1. 华北电力大学 新能源电力系统国家重点实验室,河北 保定 071003;2. 华北电力大学 河北省输变电设备安全防御重点实验室,河北 保定 071003;3. 中国华电科工集团有限公司,北京 100160;4. 中国华电香港有限公司,北京 100031)
0 引言
我国西北地区风电资源丰富,大规模风电场集中式并网发电,并通过高压输电线远距离输送到负荷中心已成为当前发展趋势,风电渗透率不断提高给系统安全稳定运行带来了新的挑战[1]。双馈风力发电机组DFIG(Doubly-Fed Induction Generator)具有发电效率高、变频器容量小、可实现有功无功解耦控制等优良特性,已成为大型风电场的主力机型[2]。然而,DFIG 在变频器控制模式下,机组转子转速与系统频率解耦,降低了系统的等效转动惯量,当渗透率增加到一定程度时,将极大地削弱系统频率动态响应能力[3]。实际上,DFIG 转速的运行范围为0.7~1.2 p.u.,转子中储备着远大于同步机的旋转动能,若能通过控制策略实现DFIG转子转速与电网频率的耦合,可大幅提高电网频率调节能力。
控制风电机组参与系统调频,通常是通过控制风电机组模拟同步机惯性实现,常用方法[4]有虚拟惯性控制、下垂控制、转子转速控制、桨距角控制以及协调控制等。虚拟惯性控制[5]和下垂控制[6]是在风电机组转子侧控制系统中附加频率控制模块,分别将系统频率变化率和变化量引入控制系统,通过快速功率控制调节转速变化释放或吸收转子动能,以补偿或吸收系统有功功率突变量。但惯性控制要以牺牲频率的超调量和过渡时间为代价;下垂控制系数不易确定,系数过大会使系统很难达到稳定状态[7]。除采用附加频率控制外,文献[8]推导了DFIG虚拟惯量与转速调节、电网频率变化的关系,通过检测系统频率变化调节风功率跟踪曲线,但该方案在频率变化初始时刻响应迟缓,为此文献[9]在转子侧控制系统中引入频率变化微分控制,使DFIG在调频全过程中提供有效的惯性支撑。此外,针对接入弱电网的DFIG 因锁相环PLL(Phase Locked Loop)动态行为影响系统稳定性的问题,文献[10-11]采用有功功率控制代替PLL技术实现DFIG与电网同步运行并提供惯量支撑。文献[12]改变了PLL传统的检测作用,将PLL作为控制系统的一部分,在不添加任何附加控制回路的情况下,通过控制PLL 参数调节内部电压控制DFIG 的惯性。风机通常运行在最大功率点追踪MPPT(Maximum Power Point Tracking)模式,缺乏备用容量,增加风机虚拟惯量仅能短时参与系统调频。为拓展风电机组参与调频的时间尺度,可在附加频率控制的基础上,结合超速法[13-14]或变桨法[15]使风电机组在正常情况下减载运行,获得一定备用容量参与系统一次调频。其中,变桨法响应速度较慢且存在机械磨损,限制了其工程应用,所以在满足减载水平的条件下,超速法成为首选[16]。但预留备用容量限制了风电机组正常运行有功出力,影响其经济性和实用性。
上述研究中提出的控制策略多是针对系统负荷扰动引起的频率变化,除此之外,常见的引起系统频率大幅变化的扰动还有线路短路故障:当高压输电线路发生短路故障时,送端会出现短时功率过剩,而当故障解除线路恢复正常运行时,系统对送端功率的需求又瞬时增大,这期间的功率不平衡将会引起送端系统频率短时大幅波动。针对该情况,本文深入研究了输电线路短路故障发生、发展及解除全过程中DFIG采用常规附加频率控制的惯量阻尼特性,由此分析了常规附加频率控制的局限性,并在此基础上提出了DFIG 与系统频率调节的改进附加频率控制策略。该策略在输电线路发生故障时,根据故障发生到解除的完整过程中系统频率的变化规律,修正DFIG 常规附加频率控制中的参数,使DFIG 出力随系统频率变化迅速调整,提高系统暂态稳定性。最后,应用MATLAB/Simulink 搭建4 机2 区域仿真模型,验证本文所提策略的有效性。
1 DFIG常规附加频率控制原理
1.1 常规附加频率控制策略
电力系统发电与用电实时平衡,当系统频率发生较大变化时,同步发电机组转速与系统频率紧密耦合,可及时响应、释放或吸收转子动能阻尼系统频率变化,特别是扰动初期,发电机惯性直接影响系统频率变化率甚至系统稳定性[17]。同步发电机的转子运动方程为:

式中:H为发电机组惯性常数;ω为实际电角速度;Δω=ω-ω0,ω0为额定电角速度;PM为机械功率;PE为电磁功率;D为阻尼系数。
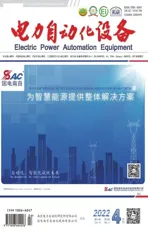
DFIG 通常运行在MPPT 模式下,不具备频率响应能力,当其渗透率较高时,为提高系统频率动态特性,通常在DFIG中加入虚拟惯性控制等附加频率控制环节,增加系统惯性[18]。常规附加频率控制的具体实现方法是在风电机组MPPT 控制的基础上附加调频辅助功率,附加功率来自转子转速变化释放或吸收的动能,如图1 所示。图中:ωr为转子转速;Pref为MPPT 模式下转子侧变流器有功功率参考值;Δf为系统频率f与额定频率fN的偏差;Kd、Kp分别为微分、比例控制系数;ΔP为总附加功率,如式(2)所示。

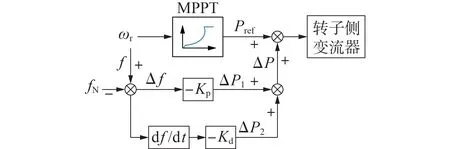
图1 常规附加频率控制示意图Fig.1 Schematic diagram of conventional additional frequency control
总附加功率ΔP包括两部分:ΔP1模拟同步发电机组有功功率静态特性,当系统频率出现偏差时,机组响应频率变化,增发与频率偏差项呈比例关系的有功功率;ΔP2模拟同步发电机组惯性响应特性,当系统频率变化时,机组调节转速变化,注入或吸收与频率微分项呈比例关系的有功功率。附加频率控制使DFIG呈现下垂控制特性的同时,还具备类似同步机转子的惯性[19]。
1.2 短路故障下常规附加频率控制的局限性分析
下面以一包含双馈风电场的4 机2 区域系统为例分析常规附加频率控制存在的问题,系统模型如图2 所示。图中:G1为双馈风电场,含300 台1.5 MW的DFIG,风电场风速设为10 m/s;G2、G3为容量为900 MW 的火电厂,均配备了调速器和励磁调节器;L1和L2分别为280 MW 和1 280 MW 的恒定有功负荷;C1和C2为无功补偿装置。

图2 4机2区域系统模型Fig.2 Model of 4-machine and 2-area power system
DFIG 集中并网并通过高压输电线路传输到负荷中心,高压220 kV 输电线路中的1 回线路发生三相短路故障F,故障持续0.15 s 后消失,线路恢复正常运行。此过程中采用常规附加频率控制的情况下,DFIG 相关参数的变化如图3 所示。图中,ΔP、ΔP1、ΔP2为标幺值,后同。

图3 短路故障下采用常规附加频率控制时,DFIG参数的变化Fig.3 Change of DFIG parameters under short circuit fault using conventional additional frequency control
图3 中,输电线路在50 s 发生短路故障,50.15 s故障解除,在此期间,DFIG 的机端电压最低降落到0.75 p.u.,送端系统频率在故障期间急剧上升,故障解除后迅速下跌,本文通过仿真所得频率变化曲线在故障发生、发展及解除全过程中的变化规律,与文献[20]中永磁直驱风电机组公共连接点发生短路故障时所得到的频率变化趋势相似。不同于负荷单一突增、突减引起系统频率单一下降或上升的情况,短路故障从发生到解除会连续经历频率上升和下降2个过程。
频率上升期间,下垂控制和惯性控制所产生的附加功率ΔP1和ΔP2均为负值,使转子侧有功参考值变小,从而控制转子加速,吸收过剩有功功率,使DFIG 输出功率减少以阻尼系统频率上升。惯性控制在故障初始时刻发挥主导作用,提供较强的功率支撑,而下垂控制在故障初始时刻的支撑作用较弱,随着频率偏差增大,下垂控制的作用逐渐增强。0.15 s后故障切除,频率上升到最大值后开始下降,系统对送端发电机组的有功需求瞬时增大,需要发电机组及时补发缺额有功功率,在此期间惯性控制所产生的功率ΔP2过零变为正值,有助于增加转子侧功率参考值,但惯性支撑作用较弱。而此时频率偏差较大,下垂控制产生的功率ΔP1作用较强,但其值为负,因此总附加功率为负值,导致转子侧功率参考值仍然较低,DFIG 输出电磁功率小于捕获的机械功率,转子保持加速趋势,无法释放动能满足系统瞬时激增的有功需求,随着频率逐渐下降附加功率最终变为正值,同时转子开始减速运行。
2 改进附加频率控制策略
在故障切除线路恢复正常运行后,瞬时增大的有功需求导致系统频率大幅跌落,此时若能发挥DFIG 转速调节快速响应的优势,及时下调DFIG 转速释放动能,补充系统有功功率缺额,缓解同步机组的调频压力,将有助于系统快速恢复稳定运行。下调DFIG转速首先应增加转子侧有功功率参考值,使DFIG 输出电磁功率大于捕获的机械功率。故障切除、频率开始下降后,频率偏差由正的最大值开始降落,此时附加功率中起主导作用的下垂控制所产生的附加功率仍为负值,导致输出的电磁功率低于捕获的机械功率,DFIG 转子仍有加速趋势,不仅阻碍DFIG 快速释放动能,且进一步加剧系统频率的快速跌落。
若从故障切除频率开始下降到降落为0 期间,下垂控制产生的附加功率变为正值,则转子侧功率参考值将会瞬间增加,使电磁功率高于DFIG捕获的机械功率,从而调节DFIG转子减速运行,释放动能阻尼系统频率下降。基于1.2 节对短路故障情况下DFIG常规附加频率控制策略的惯量阻尼特性分析,针对其局限性及上述改进方案提出了改进附加频率控制策略,该策略根据短路故障发生、发展及解除的完整过程中系统频率的变化规律修正下垂控制系数,使DFIG 在整个过程中具有有效的惯量阻尼特性,从而使其有功出力随频率变化及时调整。改进附加频率控制策略的实现方法见图4,其核心算法改进下垂控制算法的具体实现流程见图5。图中:U为机端电压幅值;e为控制信号。

图4 改进附加频率控制策略示意图Fig.4 Schematic diagram of improved additional frequency control
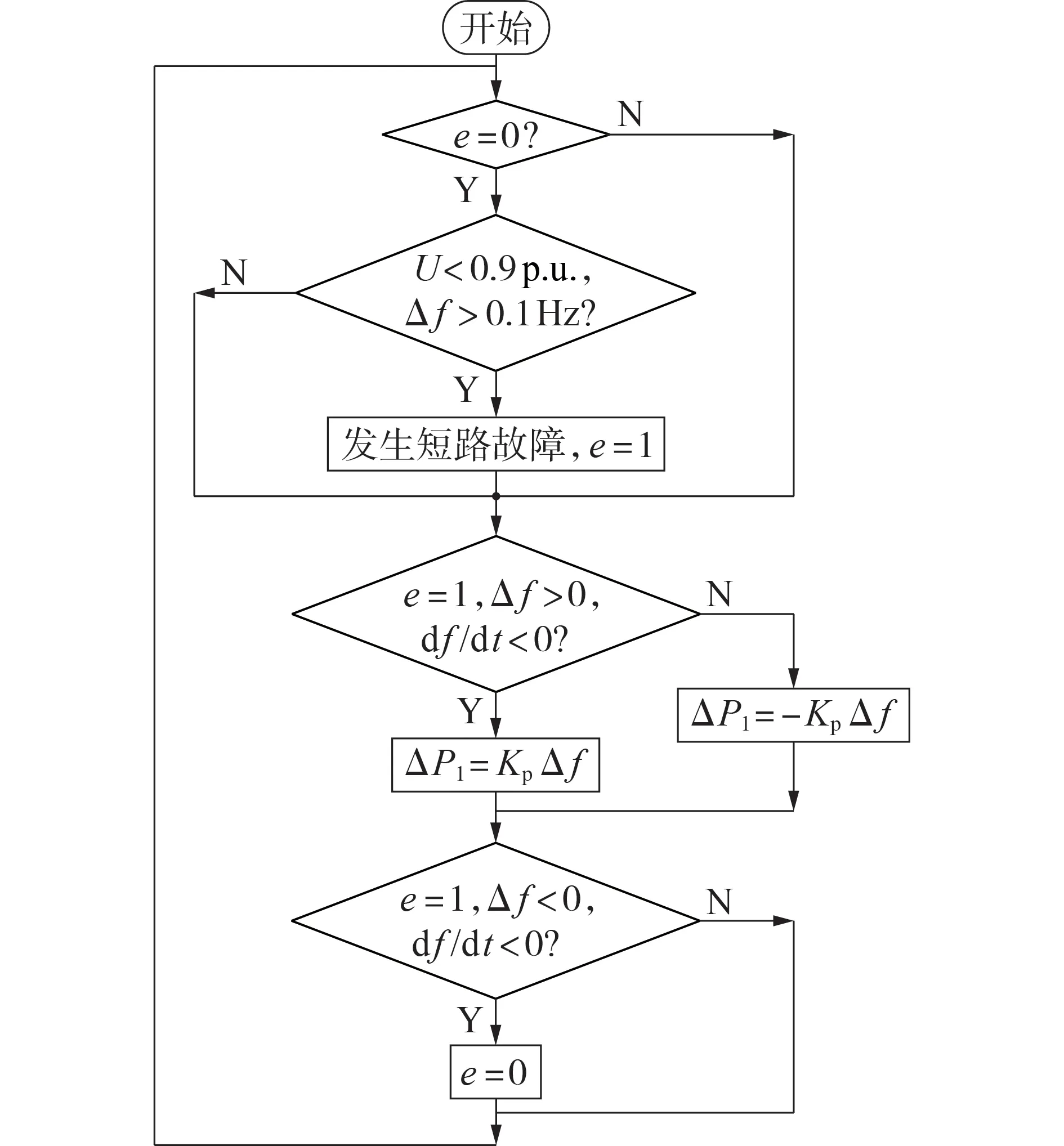
图5 改进下垂控制算法实现流程Fig.5 Implementation process of improved proportional control algorithm
当系统正常运行或发生负荷扰动而引起系统频率变化时,e=0,DFIG 采用图1 所示的常规附加频率控制策略;当系统发生短路故障而引起频率变化时,触发控制信号e置1,DFIG 采用改进附加频率控制策略。引起系统频率大幅升高的扰动主要有负荷突减和短路故障,负荷减少会引起机端电压短时升高,而短路故障会引起机端电压大幅度降落,为区分2种扰动,本文同时引入机端电压和系统频率变化作为判断是否发生短路故障的依据,如图5 所示,当机端电压幅值低于0.9 p.u.且系统频率高于50.1 Hz时,判定系统发生短路故障,e的值变为1。短路故障切除后,e的值保持为1,当频率开始下降且频率仍高于额定值时,下垂控制所产生的附加功率数值不变,符号发生变化,直到频率低于额定值时,e的值变为0,风电机组恢复常规附加频率控制。
3 改进附加控制后的仿真分析
基于1.2节中的4机2区域系统,将Kd、Kp分别取为10.08、100/3,对DFIG 无附加频率控制、采用常规附加频率控制和本文所提改进附加频率控制策略时的相关参数进行对比分析,3 种控制模式下DFIG 机端电压Vabc、并网点电流Iabc、变换器直流侧电压Vdc、送端频率f、DFIG 有功出力P和DFIG 转速ωr的变化情况如图6 所示。图中:①—③分别表示无附加控制、常规附加控制、改进附加控制,后同;Vabc、Iabc、P、ωr均为标幺值,后同。
3.1 送端频率变化分析
分析图6(d)可知:DFIG 无附加频率控制时,系统采用MPPT 控制,频率波动幅度最大,故障期间频率最高上升到50.32 Hz,故障切除后频率最低下降至49.50 Hz;相比之下,采用常规附加频率控制策略在一定程度上抑制了频率的最大偏移,故障期间最高频率由50.32 Hz 减少为50.26 Hz,频率上升期间最大频率偏差减少了18.7%,故障切除后最低频率由49.50 Hz 改善为49.68 Hz,频率下降期间最大频率偏差减少了36%,DFIG 在频率动态变化过程中起到了明显的惯性支持作用;采用改进附加频率控制策略后,DFIG 在故障切除线路恢复正常运行后及时调节转速释放转子中储存的动能,增大有功输出,使频率偏移量得到有效减弱,频率下降期间最低频率为49.76 Hz,与采用常规附加频率控制策略时相比升高了25%,且与无附加频率控制、采用常规附加频率控制策略的情况相比,在调频后期明显削弱了频率振荡趋势,使系统快速趋于稳定。
图6 发生短路故障时,3种控制模式下的参数变化Fig.6 Change of parameters under three control modes when short circuit fault occurs
3.2 附加功率变化分析
DFIG在3种控制模式下的附加功率的变化情况如图7所示。由图可知:无附加频率控制时,附加功率为0;采用常规附加频率控制策略的情况下,附加功率变化情况分析详见2.1节;采用改进附加频率控制策略的情况下,在短路故障切除后,频率偏差由最大正值开始降落直到为0,这期间下垂控制所产生的附加功率ΔP1由正变为负,从而总附加功率在故障切除的瞬间由常规附加控制的-0.1 p.u.升高到0.2 p.u.,有功参考值的增加使DFIG 能够及时调节转速释放动能,增加机组有功输出。
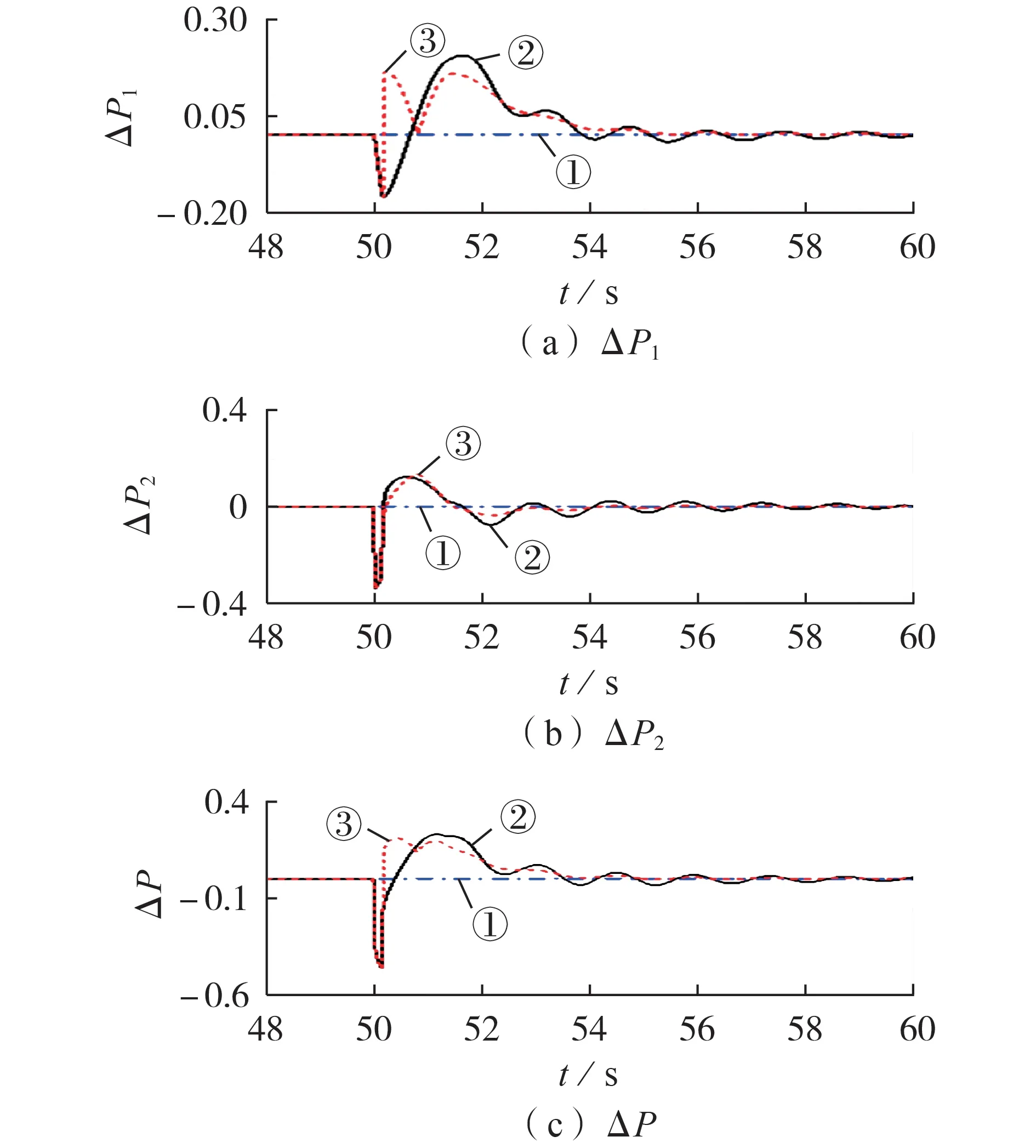
图7 发生短路故障时,3种控制模式下附加功率的变化Fig.7 Change of additional power under three control modes when short circuit fault occurs
3.3 DFIG输出有功功率变化分析
分析图6(e)可知:无附加频率控制时DFIG运行在MPPT模式,输出有功功率在0.38 p.u.附近小范围波动,对系统频率变化几乎无响应;采用常规附加频率控制策略时,短路故障发生后DFIG通过附加功率信号使其输出功率迅速跟随有功功率参考值变化,瞬间降低到0.13 p.u.,输出功率降低导致转速升高,使DFIG 偏离MPPT 模式超速运行,增加了转子动能储备量,并留有一定备用容量;故障切除后,附加功率信号使输出功率瞬间上升到0.28 p.u.,仍低于机械功率,无法满足系统瞬时增大的有功需求,随后有功出力逐渐升高,直至电磁功率大于捕获的机械功率,转速开始下降释放有功;采用改进附加频率控制策略时,短路故障切除后,附加功率信号使输出功率瞬间上升到0.43 p.u.,大于捕获的机械功率,转速瞬间下降释放动能,为系统及时补充有功功率。
3.4 DFIG机端电压和并网点电流变化分析
图8 为DFIG 并网点在短路故障发生到解除全过程时间尺度内,DFIG 机端电压和并网点电流变化情况的放大图。结合图6(a)、(b)可以看出:DFIG 机端电压在3 种控制模式下的变化基本相同,故障期间机端电压跌落至0.75~0.8 p.u.,与频率变化共同触发控制信号e,确保改进附加频率控制策略在故障发生到恢复期间发挥作用,故障切除后机端电压上升到1.1 p.u.,直至51 s恢复到11 p.u.;无附加功率控制时,故障期间DFIG 出力保持不变,有功功率过剩使并网点电流幅值增大;相比之下,采用2 种附加频率控制后,并网点电流幅值在故障期间随DFIG出力降低而跌落;改进附加控制策略与常规附加频率控制策略相比,故障切除后并网点电流幅值瞬间大幅增大,并网点电流的变化趋势与DFIG有功出力变化趋势相同。

图8 发生短路故障时,DFIG机端电压和并网点电流的变化Fig.8 Change of DFIG voltage and grid-connected current under short circuit fault
4 结论
本文针对送端包含DFIG 风电场的系统,根据输电线路发生短路故障到故障解除全过程所引起的频率变化,提出了改进附加频率控制策略,结论如下。
1)在研究常规附加频率控制策略下,故障发生、发展及解除全过程中DFIG 的惯量阻尼特性随频率变化特点的基础上,分析了该策略用于故障全过程下频率调节的局限性:常规附加频率控制适用于负荷突变引起的频率波动情况,难以满足短路故障从发生到解除完整过程的频率调节。
2)针对常规附加频率控制在线路短路故障全过程频率调节的局限性,提出风电场参与系统频率调节的改进附加频率控制策略:电网正常运行时,DFIG采用MPPT控制;系统发生负荷波动时,DFIG采用常规附加频率控制响应系统频率变化,提高系统频率的暂态稳定性;输电线路发生短路故障时,采用改进附加频率控制策略,根据线路故障到恢复正常运行全过程系统频率变化规律,修正DFIG常规附加频率控制中的参数,保持DFIG全过程有效的惯量阻尼特性,随系统频率变化迅速调整出力,提高系统频率动态响应特性。
3)4机2区域模型仿真结果表明,本文所提改进附加频率控制策略消减了系统频率波动期间最大频率偏差,调频效果得到显著改善。