摄影测量与工程测量的结合应用分析
——摄影全站仪+数码摄影机
2022-04-07宁艳雷
宁艳雷
(龙口市经纬城市规划技术服务有限公司,山东 烟台 264000)
0 引 言
在工程相关领域发展逐步呈现现代化趋势的背景下,早期的独立摄影测量技术在应用中的优势已无法体现,要从核心技术层面提升工程测量的精度,应在进行测量作业时对接两种测量方法,并将对应测量设备进行融合使用,实现对测量成果精度与质量的提升。
1 结合方案设计
1.1 构建摄影测量与工程测量共线方程
为了实现两者在测量作业中的有效结合,需要在作业前,根据两种测量设备的作业需求,构建对应的共线方程,以此种方式,确保测量结果指向性的统一化[1]。在使用全站仪进行测量时,可将镜头指向的正北方向作为工程测量坐标体系的初始化位置[2]。测量中坐标系的对接过程如图1所示。
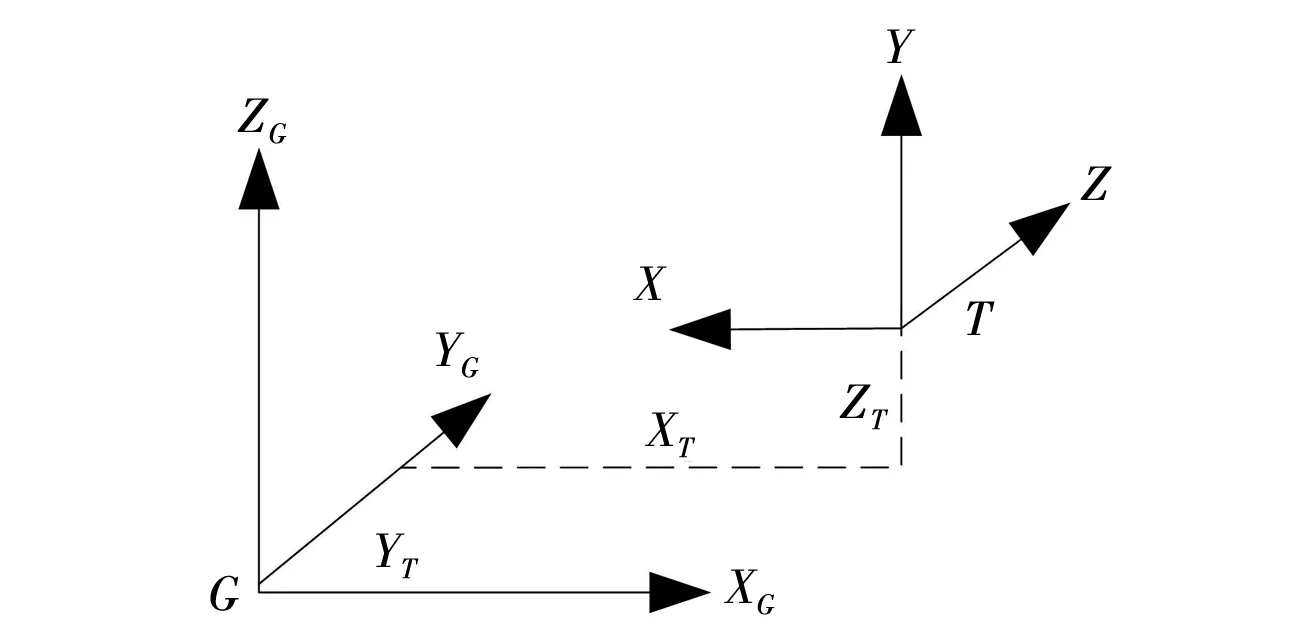
图1 摄影测量与工程测量坐标系的对接
根据图1中坐标系的空间位置,进行对应坐标点关系的描述,如公式(1)所示:
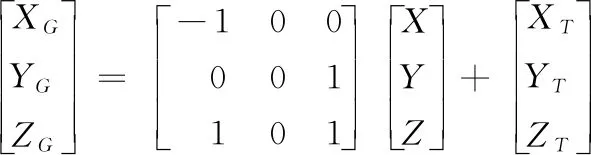
(1)
其中数码摄影机的坐标(x,y,-f)与摄影全站仪的坐标(X,Y,Z)有下述关系:

(2)
式中:α为全站仪测量的水平角度;β为摄像测量倾斜角度;λ为测量中全站仪水平位移量;R为测量中摄像镜头的正交矩阵。将公式(1)与公式(2)进行合并处理,可以得到一个针对摄影测量与工程测量的共线方程,方程表达式如下:

(3)

(4)
式中:I1~I3为空间正交系数;m1~m3为线性观测值;s1~s3为旋转联合系数。根据上述计算公式,完成共线方程的构建。
1.2 基于摄影全站仪的无接触测绘
在完成共线方程的构建后,对基于全站仪的无接触测量方案进行设计,可将此过程中的两者集成划分为两种方案,分别为直接连接方案、摄像机中CCD成像芯片与全站仪连接方案[3]。在实际测量时,根据测量任务需要,采用laval 54—5564型号摄影全站仪对其进行无接触测绘。此型号设备具有100万超清像素,在使用过程中,可直接将其与集成在全站仪中的望远镜进行对接,测量中设定其同步水平角度为α,垂直角度为β。
为了确保测量中的作业需求,将成像芯片与影像传感器直接对接,可根据其中一台摄像机的偏置宽角构成CCD相机,另一台集成在望远镜成像系统中[4]。其中,后者应与望远镜进行同轴处理。在进行测量过程中的目标点匹配操作时,还可以同步实现对目标点周围物体的测量。
1.3 数码摄影机偏置量确定与校验
由于数码摄影机与摄影全站仪的光学系统不在同一个轴结构上,在将两种测量方法应用到相同测量任务当中时,需要对其偏置量进行确定。同时,为了确保最终得出的测量结果精度符合测量需要,还需要对偏置量进行校验[5]。已知在全站仪当中包含三种坐标系,分别为地面坐标、全站仪坐标和摄影机坐标。根据数码摄影机的测量习惯,将三个坐标均设置为固定的右手坐标系。在各个坐标系都不重叠的条件下,将其相互之间存在的差异作为数码摄影机的偏置量,如图2所示。
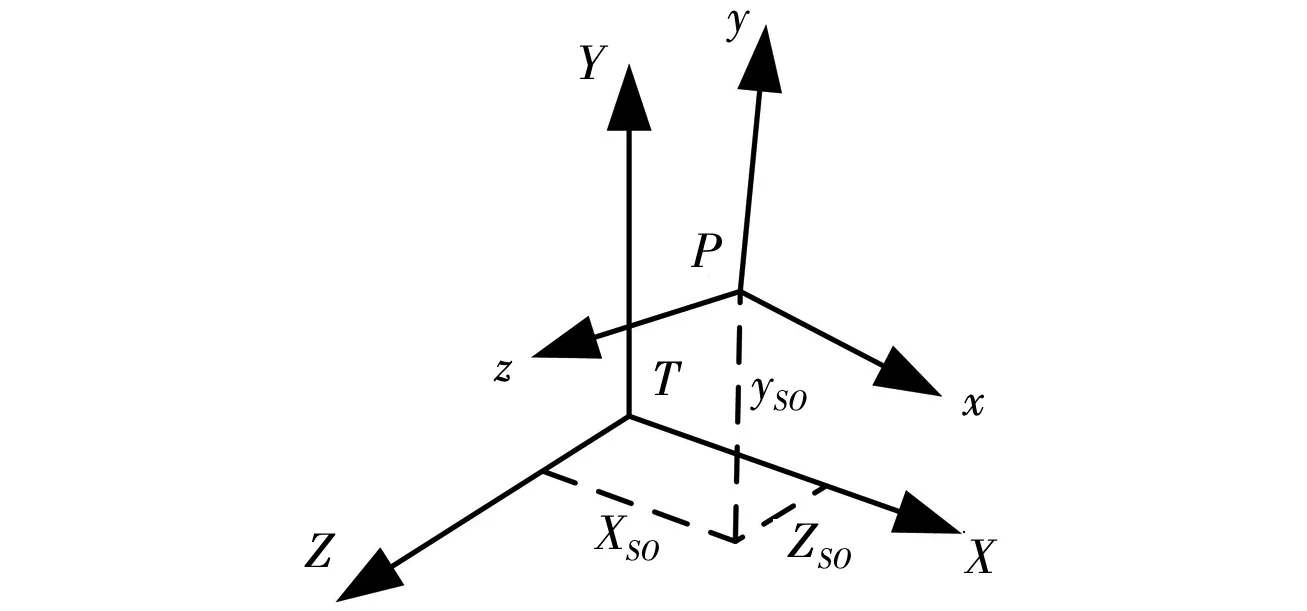
图2 数码摄影机偏置量off-set示意图
图2中,数码摄影机偏置量为off-set:Xso,Yso,Zso。当将数码摄影机安装在全站仪上时,此时off-set数值为常数,利用该数值可以实现对偏置量的在线检验,以此确保数码摄影机的测量位置准确,为后续测量提供高精度条件。
2 应用效果分析
2.1 实验准备
根据上述设计的两种测量任务的结合方案,将其代入到某工程建设项目当中,分别按照本文结合方案、单一摄影全站仪测量和单一数码摄影机测量共三种测量方案,对该工程建设项目中的各个测量对象的参数进行获取,通过比较三种测量方法与实际测量对象真实数值之间的误差,实现对三种方案测量精度的对比和验证。已知该工程建设项目为办公楼建筑,分别在该办公楼建筑上随机选择五个公共点作为测量目标,表1为五个公共点的真实空间坐标数值对照表。
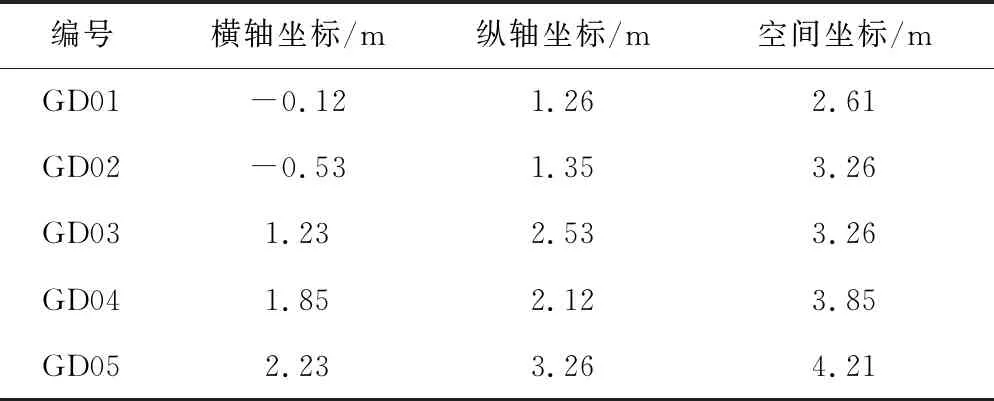
表1 办公楼建筑五个公共点真实空间坐标数值对照表
在表1中真实数据的基础上,分别完成三种方案的测量,并将其各个公共点测量结果与表1中数据进行对比,按照如下公式,计算得出各个方向上的测量误差值:
(5)
式中:ua、ub和uc分别为横轴坐标、纵轴坐标和空间坐标上的测量误差;a、b、c分别为公共点的真实空间坐标;a′、b′、c′分别为通过某一测量方案得出的测量结果空间坐标;n表示为测量次数。
再根据公式(6),计算得出最终测量方案的测量结果误差值:
u=ua+ub+uc
(6)
式中:u为最终的测量误差结果。同时,为了确保实验结果的客观性,实验中所用的摄影全站仪和数码摄影机均选择相同型号,其中摄影全站仪选用TrimbleSX 10型号,该型号摄影全站仪的测角精度为0.5″,测距精度为棱镜模式 标准 1 mm,自动水准补偿器精度为0.5″ (0.15 mgon),测程为棱镜模式单棱镜 1 m。数码摄影机选用OI405EOS 70D型号,该型号数码摄影机的传感器类型为LiveMOS。
2.2 应用结果记录与分析
在完成实验前的准备工作后,将上述计算结果以图像的形式展现,并方便对其应用效果进行对比,得到如图3所示的实验结果。
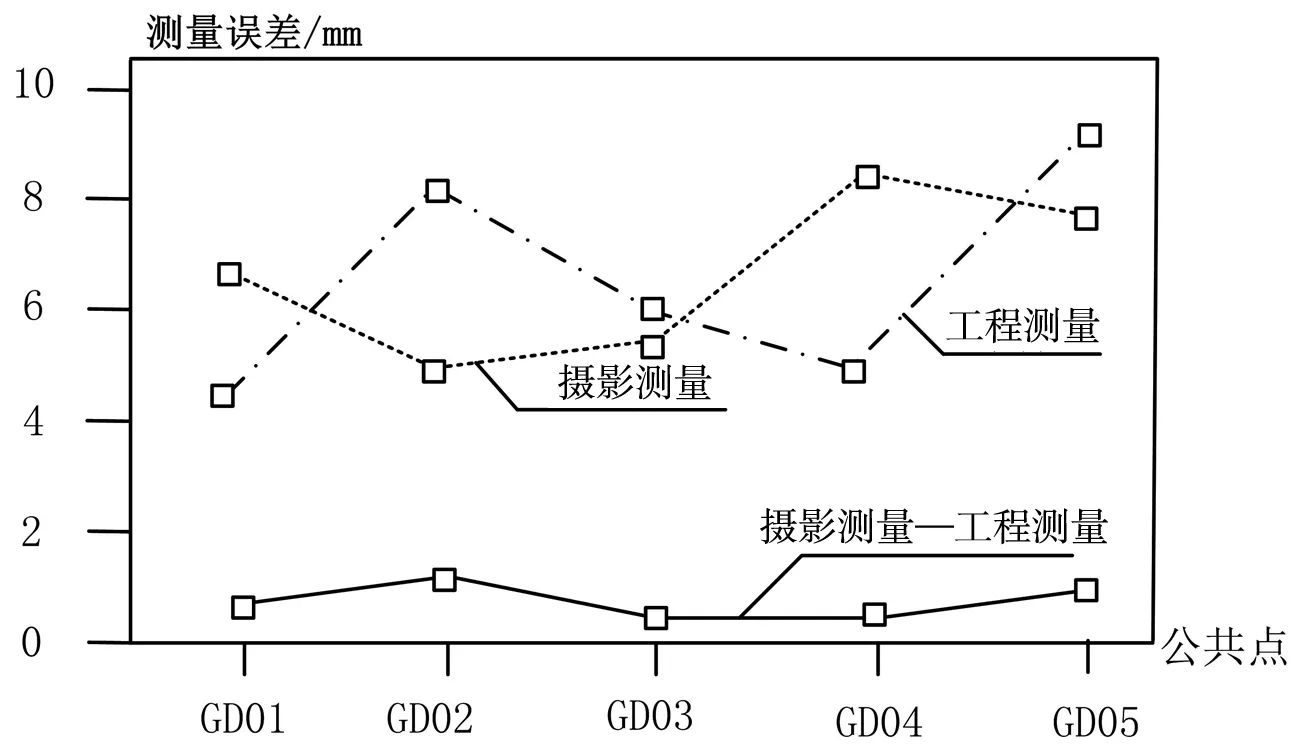
图3 三种方案测量结果误差对比
对图3实验结果做进一步对比可以得出,本文提出的结合方案在实际应用中针对各个公共点的测量误差均小于2.0 mm,而单一采用摄影测量和单一采用工程测量的测量方法的测量误差最大均超过了8.0 mm。因此,通过上述实验能够证明,本文提出的测量方案能够有效降低对各个测点的测量误差,从而提高最终测量结果的精度,可为后续工程建设与施工提供更加可靠的数据依据。
3 结束语
在完成对工程测量中结合方案的设计后,通过将此方案与传统方案进行对比的方式,证明了本文提出的结合方案在实际应用中具有准确度更高的优势。
两者的融合在真正意义上实现了测量过程的无接触作业,也不需要于测量前在现场布置较多的标志点。总之,相关此方面内容的研究,截至目前,仍属于一个较为新兴的研究领域,在一定程度上为工程测绘作业的实施开辟了新的研究领域。但要真正地将本文设计方案在市场内进行推广,还需要在后期的研究中,深入分析测量领域的理论知识,包括如何使用全站仪进行标准校验、如何将指定控制点中的三角测量延伸到控制片等。在后续的设计中,将针对此方面展开进一步的研究,以实现对本文设计方案的完善。
