体自由度颤振飞行试验的边界预测方法研究
2022-04-04雷鹏轩吕彬彬郭洪涛余立陈德华
雷鹏轩 吕彬彬 郭洪涛 余立 陈德华

摘要:体自由度颤振频率低,参与颤振的模态频率在亚临界状态往往已经极为接近,加之基于大气紊流激励的颤振飞行试验数据信噪比通常较低,增加了体自由度颤振飞行试验模态辨识以及颤振预测的难度。对此提出了一种基于Matrix Pencil模态辨识方法的体自由度颤振预测方法。通过随机减量技术对输出响应信号进行系集平均,得到随机衰减标记;运用Matrix Pencil方法拟合随机衰减标记获取模态参数,并通过频率和阻尼稳定判据筛选真实模态,再通过阻尼比与颤振稳定性判据变量外插获取颤振点。通过对仿真数据与试验数据的应用,可得到以下结论:Matrix Pencil模态辨识方法能有效辨识密集的颤振模态,并获得清晰的模态辨识稳态图。基于阻尼比及稳定性判据变量外插获得的颤振预测结果较为合理,其中DTFM( Discrete-Time Flutter Margin)判据变量的下降趋势更明显,外插结果与试验值更接近。该方法适用于体自由度颤振飞行试验的亚临界预测。
关键词:体自由度颤振;模态辨识;颤振预测;飞行试验;Matrix Pencil方法
中图分类号:V211.47
文献标志码:A
文章编号:10044523( 2022)01-020207
DOI: 10.16385/j .cnki.issn.10044523.2022.01.022
引 言
飞翼飞行器刚体短周期模态频率高,易与一阶弹性弯曲模态耦合发生一种特殊的颤振——体自由度颤振[1]。体自由度颤振的试验研究需要准确模拟刚体自由度。受洞壁尺寸限制,在风洞中开展动力相似模型的自由飞试验是困难的。若仅模拟若干关键刚体自由度,也将不可避免地引入支撑结构阻尼的不利影响,因此飞行试验成为其最有效的研究手段[2-3]。目前国外已将飞行试验列为体自由度颤振研究的主要手段,如2010年AFRL联合洛·马公司提出了建立X-56A飞行演示平台(Multi-UtilityTechnology Testbed,MUTT)计划[4-5],其目的之一就是研究体自由度颤振。2015年美国明尼苏达大学开展了飞翼外形( mAEWingl,mAEWing2)体自由度颤振飞行试验研究[6-10]。
在颤振试验(飞行、风洞)中,紊流激励是常用的激励方式之一。该方式不需要外部激励部件,易于实现且更贴近于飞行器真实状态。Scott等[11]、Gu等[12].刘基海等[13]以及黄超等[14-15]都在体自由度颤振风洞试验中采用了紊流激励的试验方案,其中Huang将ARMA模态辨识方法应用于体自由度颤振预测当中。但由于紊流激励不充分,仅使用了来流速度高于30 m/s的几个阶梯,同时辨识结果散度也较大,且缺乏试验直接获得的颤振点进行验证。紊流激励虽然易于实施,但试验数据信噪比往往较低,对于飞行试验还存在一定的非平稳特性,且数据量有限。这些都对于基于飞行试验数据的颤振亚临界预测提出了较高要求[16]。此外,现有的体自由度颤振试验数据反映出,即使在距离颤振边界较远的亚临界状态,参与颤振的模态频率也极为接近。这进一步加大了模态辨识与颤振预测的难度。
针对体自由度颤振飞行试验中数据信噪比低、模态密集的特点,本文提出了一种适用于紊流激励的体自由度颤振亚临界预测方法,并基于已开展的体自由度颤振飞行试验数据,对颤振预测方法进行了验证。
1 亚临界预测方法
本文提出了一种适用于紊流激励的颤振亚临界预测方法,并将其应用于飞行试验下的体自由度颤振预测。首先,通过随机减量分析对输出响应信号进行系集平均,得到随机减量标记;其次,运用Ma-trix Pencil方法拟合随机减量标记获取模态参数[17];最后,通过阻尼比以及稳定性判据变量外插颤振临界点。
1.1 随机减量分析
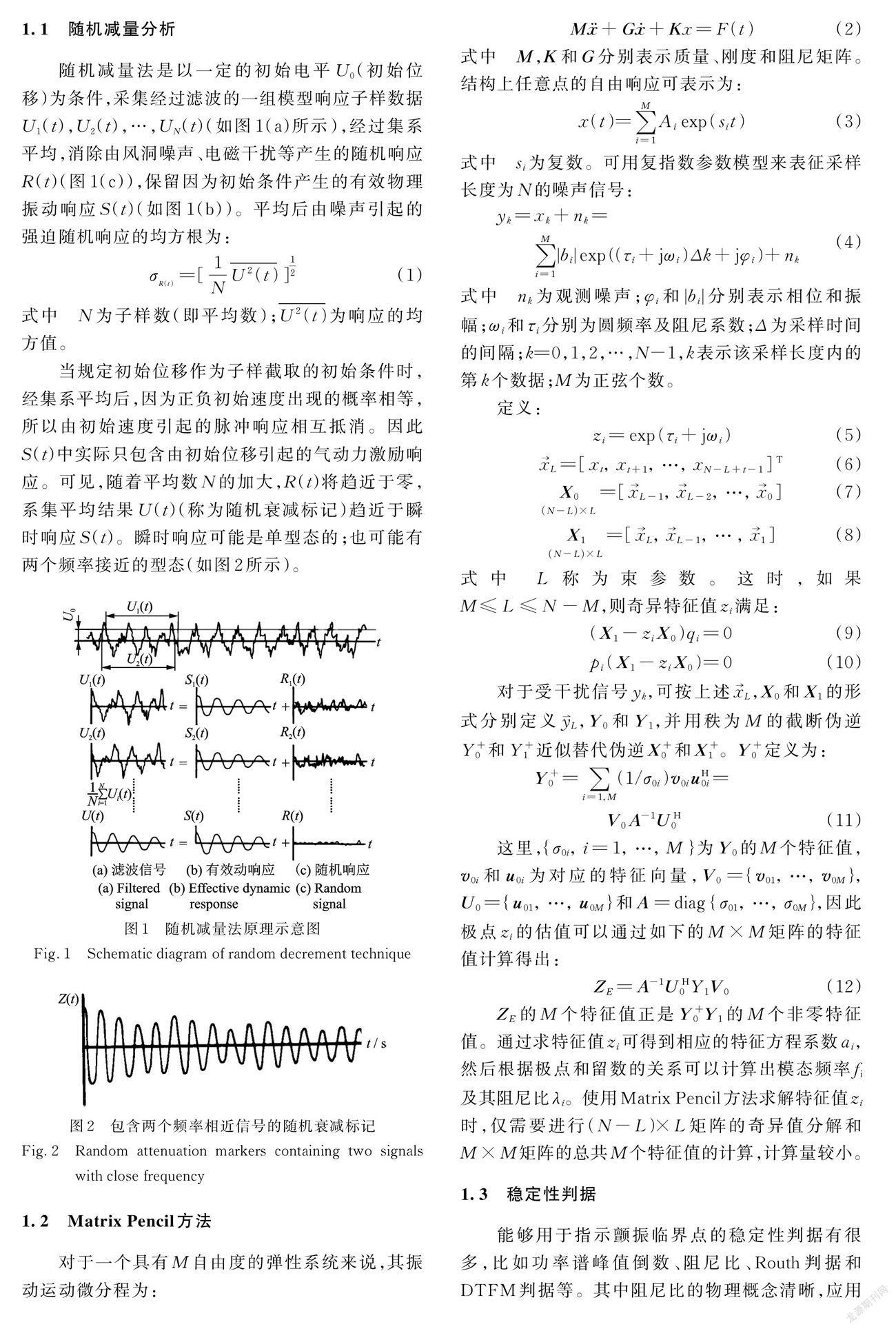
随机减量法是以一定的初始电平Uo(初始位移)为条件,采集经过滤波的一组模型响应子样数据Ul(t),U2(t),…,UN(t)(如图1(a)所示),经过集系平均,消除由风洞噪声、电磁干扰等产生的随机响应R(t)(图1(c)),保留因为初始条件产生的有效物理振动响应S(t)(如圖1(b))。平均后由噪声引起的强迫随机响应的均方根为:
当规定初始位移作为子样截取的初始条件时,经集系平均后,因为正负初始速度出现的概率相等,所以由初始速度引起的脉冲响应相互抵消。因此S(t)中实际只包含由初始位移引起的气动力激励响应。可见,随着平均数N的加大,R(t)将趋近于零,系集平均结果U(t)(称为随机衰减标记)趋近于瞬时响应S(t)。瞬时响应可能是单型态的;也可能有两个频率接近的型态(如图2所示)。
1.2
Matrix Pencil方法
对于一个具有M自由度的弹性系统来说,其振动运动微分程为:
1.3 稳定性判据
能够用于指示颤振临界点的稳定性判据有很多,比如功率谱峰值倒数、阻尼比、Routh判据和DTFM判据等。其中阻尼比的物理概念清晰,应用最为普遍,由于颤振发生时,至少有某一阶模态的阻尼变为零,从而造成自激振动引发颤振,因此可以以阻尼作为颤振是否发生的判据,但是阻尼外推法往往存在着辨识误差较大,且在亚临界阶段下降趋势可能不明显的问题。颤振基于弯扭二自由度运动方程,利用Routh判据确定系统的稳定条件。通常来说对于频率的辨识精度要高于阻尼,通过将发生耦合的模态的频率信息引入预测判据,可以显著提高预测精度,因此颤振裕度法可以提高颤振预测精度,但事先要知道发生耦合的模态。颤振裕度法以弯扭二自由度颤振方程为基础,其理论同样适用于俯仰模态与一弯模态耦合所致的体自由度颤振。对于二阶自由度的弹性系统来说,其特征方程为:
当Fx<0时,系统失稳。画出稳定性参数随着飞行速度变化曲线即可拟合外插出颤振临界点,大量高速风洞颤振试验表明,DTFM方法预测精度高、鲁棒性强,是目前高速风洞颤振试验常用的主流预测方法。gzslib2022040418202 仿真信号应用
本节以包含两个密集模态的脉冲响应信号为例检验Matrix Pencil方法对密集模态的辨识能力。考虑到体自由度颤振频率往往较低,系统的两阶模态参数分别为:f1=5 Hz,ξ1=0.05; f2=5.5 Hz,ξ2=0.05。同时在信号中加入白噪声信号,白噪声最大幅值与有效信号最大幅值比为1/10。带噪声的脉冲响应信号如图3所示,信号采样频率为100 Hz,长度为400。
图4和表1给出了Matrix Pencil方法的辨识结果,可见采用该方法可辨识获得规律清晰的稳态图。采用6~20阶模型进行辨识,均获得了稳定的两个极点,且两个极点的模态频率与真实值极为接近,模态阻尼辨识精度略差,但也基本满足颤振试验中对密集模态辨识的需求。
3 飞行试验的应用
本节采用实测的体自由度颤振飞行试验数据对上述颤振预测方法进行检验。首先对实验模型模态特性做简要说明:在飞行试验开始前,在停机状态下开展了地面振动试验。表2给出了模态频率实验结果,可见试验结果与设计目标吻合良好。
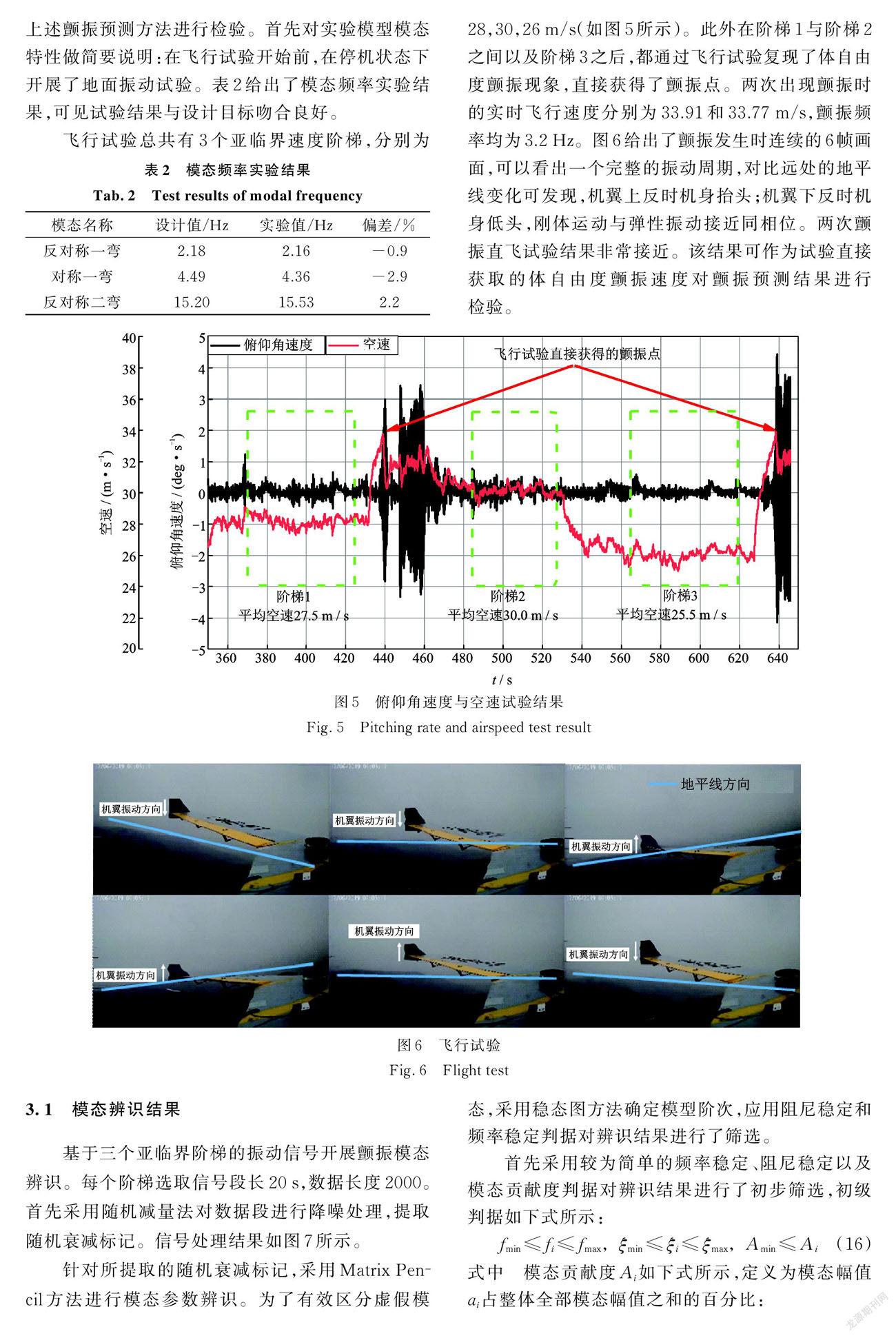
飞行试验总共有3个亚临界速度阶梯,分别为28,30,26 m/s(如图5所示)。此外在阶梯1与阶梯2之间以及阶梯3之后,都通过飞行试验复现了体自由度颤振现象,直接获得了颤振点。两次出现颤振时的实时飞行速度分别为33.91和33.77 m/s,颤振频率均为3.2 Hz。图6给出了颤振发生时连续的6帧画面,可以看出一个完整的振动周期,对比远处的地平线变化可发现,机翼上反时机身抬头;机翼下反时机身低头,刚体运动与弹性振动接近同相位。两次颤振直飞试验结果非常接近。该结果可作为试验直接获取的体自由度颤振速度对颤振预测结果进行检验。
3.1 模态辨识结果
基于三个亚临界阶梯的振动信号开展颤振模态辨识。每个阶梯选取信号段长20 s,数据长度2000。首先采用随机减量法对数据段进行降噪处理,提取随机衰减标记。信号处理结果如图7所示。
針对所提取的随机衰减标记,采用Matrix Pen-cil方法进行模态参数辨识。为了有效区分虚假模态,采用稳态图方法确定模型阶次,应用阻尼稳定和频率稳定判据对辨识结果进行了筛选。
首先采用较为简单的频率稳定、阻尼稳定以及模态贡献度判据对辨识结果进行了初步筛选,初级判据如下式所示:式中模态贡献度Ai如下式所示,定义为模态幅值ai占整体全部模态幅值之和的百分比:
根据体自由度颤振频率,及颤振问题所关心的阻尼比范围,设定频率筛选范围为0~10 Hz,阻尼比筛选范围为0~0.3,模态贡献度大于5%。
经过初步筛选后,依据连续两个模型阶次所辨识的频率与阻尼相对误差作进一步稳定模态的筛选,高级判据如下式所示:
一般来说,频率的辨识精度较高,阻尼的辨识精度较差,因此选取εf和εξ分别为5%和10%。
图8给出了采用6~20阶模型辨识获得的稳态图。图中黑色点表示满足初级判稳判据,但不满足高级判据的极点。红色加号代表满足频率稳定的极点,绿色圆圈代表阻尼稳定的极点。
首先从图8所示的亚临界状态功率谱曲线可见,对于体自由度颤振,即使在亚临界状态参与颤振的模态间频率也非常接近,从频谱上几乎难以观察出明显的多个频率峰值,尤其是飞行速度为30 m/s时的功率谱,几乎呈现出单频振动。若无法准确辨识出参与颤振的模态参数,将会直接影响颤振预测结果。
其次,从辨识出的极点稳定性可见,采用MatrixPencil方法可以准确辨识出多个稳定模态。从贡献度分布图中可见辨识出的模态分支总贡献度占到了整段振动信号的80%以上。其中从飞行速度26 m/s时的功率谱中辨识出三个稳定极点,参考模态贡献度的大小,选取较大的两阶模态进行颤振预测。
此外,图8还给出了模态阻尼比的聚类分布,并圈出了聚类分布的分散程度△ξ,以阻尼比的绝对误差表示。可以看出,各模态分支的阻尼比分布较为紧凑。随着飞行速度增大,紊流扰动加强,贡献度较高的模态分支阻尼比辨识精度显著增强,从±2.6%提高至±0.4%。
最终从整体上看,基于Matrix Pencil方法的模态辨识结果合理可靠,能实现密集模态的有效辨识,获取真实的亚临界颤振模态。表3给出了三个阶梯的模态辨识结果。
3.2 颤振预测结果
基于上一节的模态辨识结果,首先采用阻尼比作为判据进行颤振预测。图9给出了模态阻尼随飞行速度的变化曲线。从图中可以看出,最终的发散模态为模态1(俯仰模态)。由于模态阻尼随飞行速度的下降趋势并不明显,采用了二次多项式拟合和基于最后两个阶梯的线性拟合进行外插,预测的颤振速度分别为30.43和30.67 m/s。颤振频率采用发散模态分支的频率变化曲线外插获取,预测的颤振频率为2.82 Hz。
由于阻尼比无法反映出颤振发生前模态频率耦合的过程,采用既考虑频率影响又考虑阻尼影响的稳定性判据进行颤振预测。从图10和11可见,稳定性判据随飞行速度的增大下降趋势更明显,且基本呈线性关系。两种方法的颤振外插结果分别为30.90和33.42 m/s,较阻尼比外插结果都更贴近于真实值。表4给出了三种方法的颤振预测结果,可见颤振预测误差均在10%以内,且均为保守。其中DT-FM方法预测结果最准确,误差仅为 1.12%。
4 结 论
针对体自由度颤振飞行试验信噪比低、颤振模态密集的特点,本文提出了一种基于Matrix Pencil模态辨识方法的适用于紊流激励的颤振预测方法。经密集模态测试信号和飞行试验数据检验,所采用的模态辨识方法能实现密集模态的有效辨识,获得模态关系清晰的稳态图。通过阻尼比和稳定性判据变量外插能获得较为合理的体自由度颤振预测结果。其中,DTFM方法构造的稳定性判据变量Fz下降趋势明显,且预测结果与飞行试验直接获得的颤振点最为接近,表明本文提出的颤振预测方法有效可靠,能实现体自由度颤振飞行试验的数据处理和颤振预测。gzslib202204041820参考文献:
[1]杨超,黄超,吴志刚,等.气动伺服弹性研究的进展与挑战[J].航空学报,2015,36(4):1011-1033.
Yang Chao, Huang Chao, Wu Zhigang, et al.Progressand challenges for aeroservoelasticity research[J].ActaAeronautica et Astronautica Sinica, 2015, 36(4):10111033.
[2] Love M H, Zink P S,Wieselmann P A, et al.Bodyfreedom flutter of high aspect ratio flying wings [C].Collection of Technical PapersAIAA/ASME/ASCE/AHS/ASC Structures , Structural Dynamics and Mate-rials Conference , 2005 , 3 : 1808-1830.
[3]Nicolai L, Hunten K, Zink P S, et al. System benefitsof active flutter suppression for a sensorcrafttype vehicle[C]. 13th AIAA/ISSMO Multidisciplinary AnalysisOptimization Conference , 2010 : 9349.
[4]Bumett E, Atkinson C, Beranek J, et al. Ndof simula-tion model for flight control development with flight testcorrelation [C]. AIAA Modeling and Simulation Tech-nologies Conference, 2010: 7780.
[5]Beranek J, Nicolai L, Buonanno M. et al. Conceptualdesign of a multiutility aeroelastic demonstrator [C].13th AIAA/ISSMO Multidisciplinary Analysis and Op-timization Conference , 2010 : 9350.
[6]Regan C D, Taylor B R. mAEWingl: Design, build,testinvited [C] . AIAA Atmospheric Flight MechanicsConference , San Diego , USA , 2016 : 1747.
[7]Gupta A, Seiler P J, Danowsky B P. Ground vibrationtests on a flexible flying wing aircraft [ C ] . AIAA Atmo-spheric Flight Mechanics Conference , 2016 : 1753.
[8]Kotikalpudi A. Pfifer H. Balas G J. Unsteady aerody-namics modeling for a flexible unmanned air vehicle[C]. AIAA Atmospheric Flight Mechanics Confer-ence . 2015 : 2854.
[9]Schmidt D K, Zhao W, Kapania R K. Flightdynamicsand flutter modeling and analyses of a flexible flyingwing drone [C] . AIAA Atmospheric Flight MechanicsConference , 2016 : 1748.
[10]Danowsky B P, Kotikalpudi A, Schmidt D K, et al.Flight testing flutter suppression on a small flexible fly-ingwing aircraft [J]. 2018 Multidisciplinary Analysisand Optimization Conference, DOI: 10.2514/6.20183427.
[11]ScottRC,VetterT K,PenningKB,et al.AeroServ0~elastic testing of a sidewall mounted free nying windtunnel model[C]. Collection of Technical PapersAIAA Applied Aerodynamics Conference, 2008,DOI:10.2514,6.2008 7186.
[12]Gu Yingsong,Yang Z C,Marzocca P,et al.Body free—dom nutter of a nexible blended wing body like plateAn experimental study[C].17th Intemational Forumon Aeroelasticity and Structural Dynamics, IFASD2017,Como,Italy,2017,4(4):2558 2573.
[13]劉基海,谷迎松,杨智春.支撑刚度对飞翼模型固有模态和体自由度颤振特性的影响[J].振动工程学报,2018,31(5):727 733.
Liu Jihai,Gu YingS0ng,Yang ZhiChun.InnuenCe ofsupport stiffness on modal and body freedom nuttercharacteristics of a nying wing model[J].Joumal ofVibration Engineering,2018,31(5):727 733.
[14]黄超.柔性飞翼机颤振主动抑制系统建模、设计与验证[D].北京:北京航空航天大学,2018.
Huang Chao.Modeling,design,and verification of ac—tive nutter suppression system acting on flexible nyingwing aircraft[D].Beijing:Beihang University,2018.
[15]Huang Cha0,Wu Zhigang,Yang Cha0,et al.Flutterboundary prediction for a nying wing model exhibitingbody freedom nutter[C].58th AIAA/ASCE/AHS/ASC Structures,Stmctural Dynamics,and MaterialsConference 2017.2017:1 11.
[16]唐炜,史忠科.飞机颤振试飞数据处理[M].北京:国防工业出版社,2018.
[17]郭洪涛,路波,吕彬彬,等.面向紊流激励响应的颤振亚临界预测方法[C].第13届中国系统仿真技术及其应用学术年会,中国黄山,2011.
