无动力下肢负重外骨骼人机动力学及其储能元件刚度尤化
2022-04-04曹益张建军阎强戚开诚郭士杰
曹益 张建军 阎强 戚开诚 郭士杰

摘要:为提高人体搬运效率,降低人体关节损害,提高外骨骼能量利用效率,基于人机动力学对一种无动力辅助负重下肢外骨骼的储能元件刚度进行优化。应用牛顿欧拉动力学方程建立人机耦合动力学模型,得到各关节力矩与大小腿长度和质量、关节转角及弹簧刚度关系的数学模型。将三维动作捕捉系统采集的角度数据代入动力学方程中,通过MATLAB进行计算得到关节力矩动态变化规律。建立人机系统各部分的能量流动模型,并进行步态周期内的能量流动分析,以储能元件刚度为参数,储能元件的能量流动为约束条件,各关节平均力矩最小为目标建立优化模型,通过与AnyBody人体仿真软件获得的人体模型作对比验证优化结果的正确性。结果表明,穿戴优化后外骨骼减轻了下肢着地时对人体的冲击,有效降低了人体能耗和下肢关节转矩。
关键词:人机动力学;负重外骨骼;能量流动;刚度优化
中图分类号:0313.7;TH113.1
文献标志码:A
文章编号:10044523( 2022)01-0168-10
DOI: 10.1638 5/j .cnki.issn.10044523.2022.01.018
引 言
可穿戴型下肢外骨骼是一种辅助人体下肢运动的仿人型机器人,其中助力型外骨骼面向健康人群,具有辅助人体负重的功能[1]。
在该领域中,研究最早的为含动力助力型外骨骼,如由美国加州大学伯克利分校研制,采用液压驱动的伯克利下肢末端外骨骼(BLEEX)[2],整体结构为开链结构;以色列研发的第一款获得FDA认可的外骨骼ReWalk[3],采用了体感芯片,捕捉患者肢体动作,感应患者重心的变化,模仿行走步态,协助下肢截瘫的患者重新行走;意大利特伦托大学研制的一种全身外骨骼机构[4]需要外接电源驱动,且含有气动元件;但是该类外骨骼存在续航时间短、人机协调能力低[5]J等问题。无动力外骨骼不需外接电源,避免了续航时间的问题,如浙江大学提出了一种无驱动含柔性关节的下肢外骨骼[6],可以通过膝关节将负载传递到地面,并通过髋关节弹簧储能元件辅助行走以达到节省人体能耗的目的;卡内基梅隆大学设计了一种无动力踝关节外骨骼[7],通过轻质弹簧装置实现小腿肌肉和跟腱的类似功能,从而减少了人体行走的代谢成本。
然而上述无动力外骨骼兼具高承载能力、高能源利用率和较好协调能力的构型较少,问题在于:第一,缺乏储能元件,人体能源利用率较低;第二,未对人机协同问题进行深入研究;第三,对能量研究缺乏深入,能量回收过程转化效率低,导致能量损失较多。对于第一个问题,张建军等[8]提出了一种新型外骨骼,采用耦合双闭链结构并安装弹性储能元件予以解决,此外为实现降低人体能耗,提高人体工作效率的目的,设计了由两弹簧同轴叠加构成的储能元件。将重物势能转化为机构弹性势能储存起来,并在下一步态中作为动能释放,以此来实现重力势能的循环应用。因此该部件是本外骨骼的关键元件,有必要对其刚度进行优化。
针对无动力外骨骼能量及弹簧刚度优化问题,朱策策等[9]从静力学分析对外骨骼进行刚度优化,郑超[10]针对人体行走奔跑过程中能量流动特性进行分析。对本外骨骼人机耦合中基于能量的同轴心双弹簧进行优化的研究相对较少。
本文基于张建军等引提出的适用于健康人群进行负重作业的无动力下肢外骨骼,通过建立人机动力学模型来分析动态力矩。应用关节功率法获得各关节处功率的动态变化。对人机系统负重行走的能量进行研究。在人体做负功时由外骨骼储能元件进行补偿。通过优化该储能元件的刚度,保证负重行走过程中人体各关节所需提供的有效转矩最小,有效减轻人体能耗。
1 外骨骼机构描述
无动力外骨骼的设计原理如卜:
(1)从机构的负载与刚度出发,外骨骼结构采用双支链组成的闭链机构。
(2)为减轻人体负担,以后部支链作为主要传递支链,将负重南人体转移至地面。
(3)为提高人体能源利用率,基于人体储能策略,设计一种变刚度储能元件。
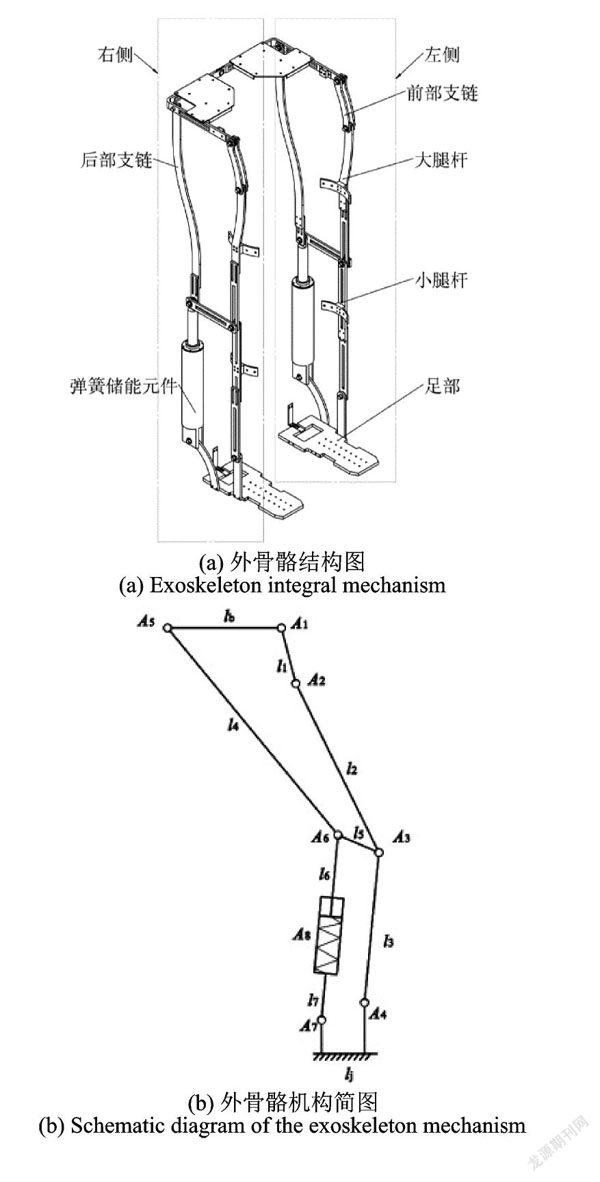
根据设计原理,该外骨骼分为左右两个对称部分,分别对应人体的左腿和右腿,外骨骼结构图如图1(a)所示,前后两条支链由杆件和转动副组成,储能元件与后部小腿连杆构成移动副,机构简图如图1(b)所示。人体负重行走形时,腿部通过与前部支链绑缚,以驱动外骨骼前进,增强人机协凋性,实体样机穿戴如图1(c)所示,左右两侧分别有4个自南度,并在髋部设置侧向转动副,满足人体正常行走姿态。
位于后部支链的储能元件如冈2所示,在步态后期起到储能的效果。通过各元件的共同作用实现对能量循环利用的目的。
2 人机耦合动力学模型
2.1 特征参数合成
南于人类意识先于外骨骼,现有的机械运动模型不足以分析系统动力学。因此,需要建立人机耦合运动模型分析动态力矩变化。
人体肢体与外骨骼机构在质量、转动惯量等特性参数上存在差异[11],需要合成特征參数来平衡人与外骨骼的两种运动。若只考虑矢状面运动[12],则卜肢的运动如图3所示。组件分别是足部B5、小腿B4、外骨骼小腿B3、大腿B2和外骨骼大腿B1。
通过平衡人体与外骨骼的重量和杆件长度,找到人机耦合情况下人体下肢各部位的质心相对
2.2 人机耦合动力学模型
人机耦合的牛顿一欧拉动力学方程各杆件的动力学模型如图4--7所示。
后部支链受力分析如图8所示:负重主要由后部支链转移至地面,且储能元件为主要承力机构,因此分析行走过程中由lk变化引起的储能元件受力。储能元件为同轴心重叠双弹簧,在单个步态支撑周期内,人体穿戴外骨骼负重行走时顺次压缩两个弹簧,刚度分别为岛与k2,在步态支撑周期前中期压缩长弹簧时,储能元件受力为:
在求得力F5,F6前提下,通过角α2,α3建立三角函数,如下式所示,可对后部支链各杆件及膝部连接杆进行受力分析:gzslib202204041759由以上的力、力矩平衡方程代人消去桿件之间作用力,可解得各关节力矩Mi,表达式如下式所示:
2.3 人体下肢关节角度信号采集
对下肢各关节动力学求解,需要人体各关节的运动信息,对人体下肢关节角度进行信号采集实验。
实验选用FASTCAM SA-X29三维运动捕捉[13]和分析系统对身高175 cm,体重80 kg的受试者进行运动数据采集,如图9所示。试验人员穿着试验服,在左脚踝和右脚踝、左膝关节和右膝关节、右髋关节和右髋关节等重要部位粘贴识别点。用高速摄像机捕捉实验者的运动数据。可以很容易地获得髋关节、膝关节和踝关节的角度运动变化数据,再对原始数据进行数据提取,将欧拉角换算成弧度,得到人体下肢关节角运动数据,如图10所示。
2.4 基于Simmechanics的人机耦合的下肢建模
基于动力学方程,在Simmechanics中建立人机耦合的下肢模型[14],如图11所示,将信号采集的角度进行多项式拟合得到角位移函数,对角度进行求导计算出各关节的角速度、角加速度,再将每一时刻各关节的角度、角速度,角加速度以及模型的其他参数作为模型的输人参数,定义子模块关节驱动。
根据已计算出的力矩表达式,确定模型中的各个参数,储能元件基本参数如表1所示,人体模型参数如表2所示[16]。计算所得到的数据将作为动力学公式所需参数。
对模型进行参数配置并运行,得到了髋、膝、踝三个下肢关节的动态力矩变化。进而建立相应的能量模型和优化模型对弹簧刚度进行优化。
3 人机耦合负重行走能量模型
3.1 人机耦合负重行走能量流动方程
在人体稳定行走步态中,重力和人体驱动关节做功,在整个运动阶段系统的能量守恒[16]。能量的转化和守恒与人体稳定行走有着密切的关系。为了更清晰地说明人机耦合运动过程中动能、势能和功率的关系,将利用五杆模型来分析能量在肢体间传递与转换的关系,如图12所示。
以此说明人机耦合在负重稳定行走的运动过程中的能量流动规律,通过机械能的变化量确定系统所需要的能量。为人机耦合外骨骼的能耗分析提供理论支持。
3.2 人机耦合负重行走人体能耗计算方法
在人机耦合负重行走条件下,采用关节功率法[17]求解功率。将关节视做功源,则该关节做功的功率为:
以此可以得到各关节驱动力的做功变化量,更加简单地求解人体的最低能耗。
3.3 人机耦合负重行走过程能量分析
人体负重行走时的能量应随负重行走的运动姿态而改变,结合人体行走时的能量转化,以确定最优的弹簧刚度。
建立人体一外骨骼系统负重行走情况下的五杆模型,如图13所示。整个运动过程,人体一外骨骼系统的总能量应当为重物能量、外骨骼、人体外骨骼系统行走时动能、势能的累加能量的总和,如下式所示:
将人体运动过程简化为五杆模型,分别为躯干、左小腿、左大腿、右大腿、右小腿。其中左腿,右腿的后部支链又包含储能弹簧。C1-C5分别为左小腿、左大腿、躯干、右大腿、右小腿的质心点,各部位的质量分别为m1--m5,左右腿的各部位长度应相等,根据之前建立的人机耦合的模型,寻找到各部位质心在坐标中的相对位置,用以求得各部位在行走过程中的能量,以支撑脚踝关节为零势能点。
质点系从某位置到其“零势能位置”的运动过程中,各有势能的力做功的代数和为此质点系在该位置的势能。如下式所示:
V=mg(yci-yci-1)
(28)式中ya为质点坐标。
做平面运动的刚体的动能,等于随质心平移的动能与绕质心转动的动能的和,如下式所示:式中 vc为质心速度;Je为对质心轴的转动惯量。
本外骨骼为无动力储能式辅助负重外骨骼,在机构中存在储能弹簧,存在弹性势能和重力势能、动能之间的转化。弹簧势能Vk为:式中 k为弹簧的刚度系数;v为弹簧形变量。
4 储能元件刚度优化
4.1 目标函数及约束条件
提出一种节能方案:储能元件在行走过程中代替人体做功,将重力势能转化为白身的势能储存,在关节需要做功的阶段将能量释放以此来实现重力势能的循环应用。
利用之前的动力学方程和此前得到的能量分析,进行多目标优化,对储能元件刚度进行优化,在人体负重行走时表现出更好的性能,可以有效地减少行走时各关节的转矩和人体能量的消耗。
由于转矩属于矢量[18],为了更加准确地求解出一个步态支撑周期内各关节的有效转矩,采用均方根值法对整个周内不同关节角度的转矩进行求和。
以下肢各关节由负载产生的总有效转矩作为目标函数,建立优化模型如下式所示:
外骨骼储能元件刚度优化模型的约束条件:
1)在弹簧单侧下肢从站立中期足跟着地到站立末期足尖离地的过程中,重物的能量转化为弹性势能并储存,遵守能量守恒定律,并减少人体能耗。
2)一个步态周期内,优化后三个关节由负载产生的平均转矩应减少。
3)弹簧刚度应始终大于0,短弹簧的刚度应大于长弹簧的刚度。
4)关节倾角不超过人体正常行走关节倾角的值,行走步态不发生改变。
4.2 优化方法、参数设置及优化结果
已知待优化的数学模型中有变刚度的储能元件,行走过程中顺次压缩两个弹簧。设定优化参数为k1,k2。利用MATLAB中的极值函数用于求取不等式约束的单变量非线性规划问题
的极大极小值。以此对该刚度
优化模型进行求解,目标函数如式(31)所示,各关节转角θi,机构的尺寸参数lkt,hi,lk2为已知变量。通过目标函数,根据之前建立的动力学数学模型,得到人体关节力矩与人体身高体重及各关节角度的关系,应用关节功率法,能量的数学模型来白于关节力矩动力学的数学模型,所以在约束条件下实现关节力矩最小,即实现了人体能耗降低。在人体身高175cm、体重80 kg组合确定的情况下,长弹簧刚度k1和短弹簧刚度k2的优化结果如图14所示。gzslib202204041759求解出目標函数f(x)的最小值,从图中可以看出紫色区域处于图像最低点,即关节力矩最小,得到优化参数的最优解,如表3所示。
4.3 优化后的仿真验证及结果分析
优化后的结果需与AnyBody相关软件建模[19]。获得的人体模型和未优化前穿戴下肢外骨骼行走时各关节产生的转矩、功率以及外骨骼系统的能耗作比较,来检测人体能耗的降低程度。
将步态支撑周期内,穿戴下肢外骨骼前后,人体髋、膝、踝关节产生的转矩进行对比,如图15所示。人体模型在未穿戴下肢外骨骼时,3条动态曲线在局部都有不同程度的震荡冲击,且震荡位置都在0.6 s附近。通过对照人体行走步态,该时刻处于摆动脚着地的时刻,由此可知,人体在摆动腿着地瞬间会产生冲击,造成关节力矩的震荡。由图可知,穿戴外骨骼可有效减轻对关节的震荡冲击,与未穿戴下肢外骨骼模式相比,穿戴下肢外骨骼模式的各关节力矩显著减少,优化后各关节力矩的减少更为明显。膝关节和踝关节减少较多,约为25%。但踝关节峰值出现了滞后。
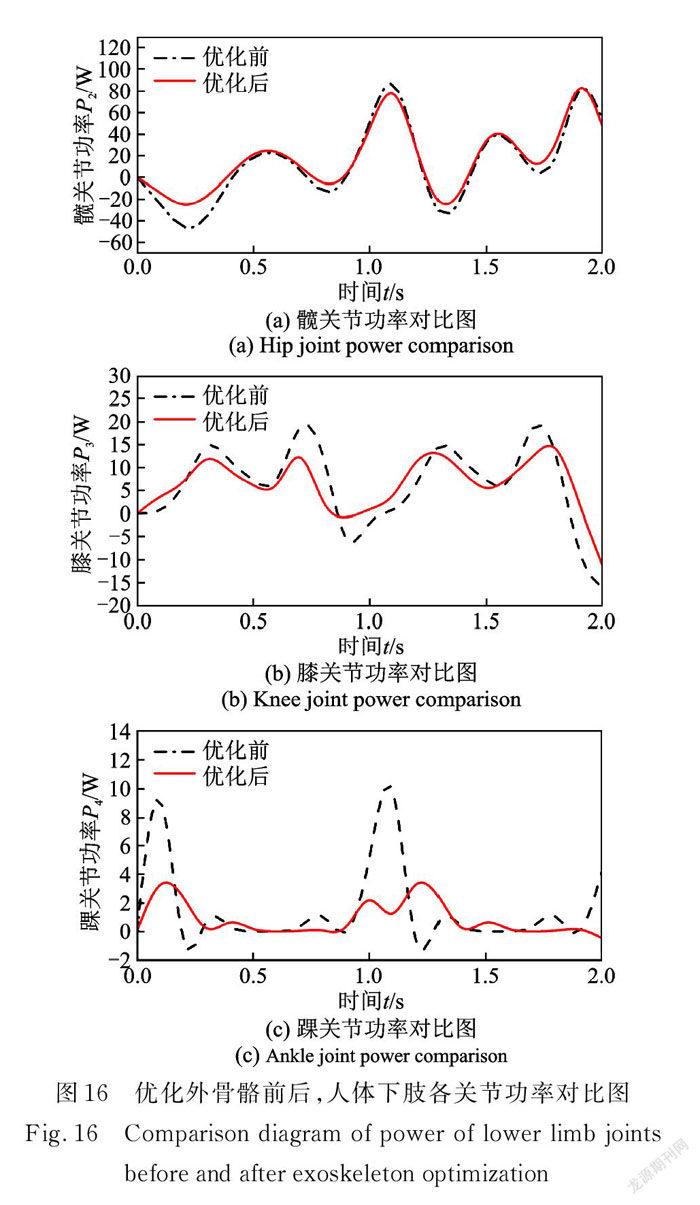
如图16功率曲线所示,髋关节、膝关节、踝关节在一个步态周期内,都存在功率为负值的阶段。对于优化储能元件刚度后的外骨骼,实现了对人体能耗的减少,在关节做负功时储能元件能有效地代替人体做功,将重物的重力势能储存,实现了势能的循环利用,外骨骼的性能得到了较大的改善。
如图17所示,通过之前建立的外骨骼系统的五杆模型,外骨骼系统优化前后的能量守恒,验证了求解过程的正确性,说明穿戴下肢外骨骼能有效地减少人体能耗。
5 结论
(1)通过牛顿一欧拉动力学方法建立人机耦合的动力学数学模型,根据人体参数计算出了动力学方程中需要的人体大小腿的长度、质量以及转动惯量等参数,将三维运动采集设备采集的关节角数据计算处理后导人到MATLAB中,对人机耦合动力学模型进行求解计算,得到了髋、膝、踝三个下肢关节的动态力矩的变化规律。
(2)基于能量守恒定律和能量流动特性,建立人体下肢能量流动方程和人体一外骨骼系统负重行走情况下的五杆模型,通过对比优化前后外骨骼系统能量的变化来验证系统的机械能守恒,为外骨骼能量分析提供参考。
(3)结合关节转矩的动力学模型以及目标函数建立储能元件刚度的优化模型。保证了无动力外骨骼最大程度减少了关节产生的转矩。膝关节和踝关节减少较多,约为25%。通过对比分析,人体穿戴优化后外骨骼,有效地减轻了下肢着地时对人体的冲击,减少了人体下肢各关节转矩。因此,穿戴外骨骼后能有效地降低人体能耗。
参考文献:
[1]Robert B. Exoskeletons-a review of industrial applications[ J] . The Industrial Robot , 2018 , 45( 5) : 585590.
[2]Yan T, Cempini M , Oddo C M , et al. Review of assis-tive strategies in powered lowerlimb orthoses and exoskeletons [Jl. Robotics and Autonomous Systems,2015 . 64 : 120-136.
[3]Tagliamonte N L, Sergi F, Carpino G, et al.Human-robot interaction tests on a novel robot for gaitassistance [ C ] . Proceedings of IEEE International Con-ference
on
Rehabilitation
Robotics,
Seattle ,
USA,2013 : 1-6.
[4]Kawale S S, Sreekumar M. Design of a wearable lowerbody exoskeleton mechanism for shipbuilding industry[Jl. Procedia Computer Science, 2018. 133: 1021-1028.
[5]Chen Guiliang, Guo Jianli, Liu Gengqian. Dynamicsanalysis and PID control of knee joint of lower limb rehabilitation robot [Jl. Joumal of Hebei University ofTechnology, 2013, 42( 5) : 71-76.
[6]王东海,基于行走步态的被动式重力支撑柔性下肢外骨骼系统 [D] .杭州 :浙江大学 , 2016 .
Wang Donghai. Flexible lower limb exoskeleton supported by passive gravity based on walking gait [Dl.Hangzhou : Zhejiang University , 2016.
[7]Collins S H,Wiggin M B,Sawicki G S.Reducing theenergy cost of human walking using an unpowered exo—skeleton[J].Nature,2015,522(7555):212 215.
[8]张建军,李天宇,王晓慧,等.一种辅助负重人体下肢外骨骼:ZLl05798893B[P],2017—9—12.
Zhang Jianjun,Li Tianyu,Wang Xiaohui,et al.Anauxiliary weight_bearing exoskeleton of lower limbs:ZLl05798893B[P],2017 9一12.gzslib202204041759[9]朱策策,张建军,阎强,等.无动力储能式辅助负重外骨骼弹簧刚度优化[J].机械设计与研究,2019,35(03):25—29+36.
Zhu Cece,Zhang Jianjun,Yan Qiang,et al.0ptimiza—tion of the spring stiffness of an auxiliary weight_bearingexoskeleton without power storage[J].Mechanical De—sign and Research,2019,35(03):25 29+36.
[10]郑超.基于人体能量流动特性的外骨骼低能耗驱动关节的研究[D].哈尔滨:哈尔滨工业大学,2016.
Zheng Chao.Research on exoskeleton low—energy drivejoint based on human energy fl.w characteristics[D].Harbin:Harbin Institute of Techn0109y,2016.
[11]Guo Q,Li S,Jiang D.A 10wer extremlty exoskeleton:Human Machine c.upled modeling,robust c.ntr01 de一sign,simula“on,and overload carrying experiment[J].Mathematical ProblemS in Engineering,2015:905761.
[12]Neptune R R,Mcgowan C P.Muscle contributions towh01e_body sagittal plane angular momentum duringwalking[J].Journal of Biomechanics,2010,44(1):6 12.
[13]Yan Q,Zhang J J,Li B,et al.Kinematic analysis anddynamic optimlzatlon simulati.n of a novel unpoweredex.skeleton with para11el top01.gy[J].Joumal of Robot—ics,2019,(1):1 12.
[14]王砚,黎明安.Matlab/Simulink动力学系统建模与仿真[M].北京:机械工业出版社,2018.
Wang Yan,Li Ming an.Matlab/Simulink DynamicsSystem Modeling and Simulation[M].Beijing:ChinaMachinery Industry Press,2018.
[15]中华人民共和国国家技术监督局.中国成年人人体尺寸:GB/T 10000 1998[S].北京:中国标准出版社,2004.
National Technical Supervision Bureau of the People 7sRepublic of China.Chinese adult human body size:GB/T 10000 1998[S].Beijing: China Standard Press,2004.
[16]Jing Fang,Yuan Yuan.Human in the l00p optimizationof wearable robots to reduce the human metab01ic ener—gy c.st in physical movements[J].R.botics and Auton—omous Systems,2020,127.
[17]蘆坤,周兴龙,闫松华,等.人体日常活动机械功及能量效率的初步研究[J].北京生物医学工程,2014,33(2):153-159+216.
Lu Kun, Zhou Xinglong, Yan Songhua, et al. Preliminary study on mechanical work and energy efficiency ofhuman daily activities[J].Beijing Biomedical Engineering, 2014, 33(2):153-159+216.
[18]许鸿谦.助力外骨骼人机系统动力与能量驱动特征研究[D].成都:西南交通大学,2018.
Xu Hongqian. Study on dynamic and energy drive characteristics of human-machine system with powerassisted exoskeleton [ D ] . Chengdu : Southwest Jiaotong University, 2018.
