基于LoRa协议的扫地机器人路径区域规划
2022-04-02刘琪亮,叶哲闽,吴圣龙,邹腾跃
刘琪亮,叶哲闽,吴圣龙,邹腾跃




摘要:针对当前国内外缺乏对大场地环境下扫地机器人方面研究的空白,提出一种LoRa协议和改进的灰狼算法相结合的智能场地扫地机器人。在通信方面引入LoRa局域网,比较显著提高了通信效率,降低通信能耗,并能很好地适应大范围的工作环境,结合上位机为操作者提供较精确的地图定位以及简单的控制应用。在路径规划方面,主要是采用经过改进的传统灰狼优化算法的多任务目标遍历方式,并结合遗传算法等技术,在传统灰狼的方法上增加了非线条收敛因子调整策略,其在迭代初期对全局检索的收敛因子变化大,非线性因素改变的速度慢,对全局检索能力强。仿真结果也证实,优化算法的模型求解力更强,且遍历路径也更短,对大场地条件下的越来越多任务目标遍历也能取得很好的成效,且对大环境下越来越复杂、任务目标愈来愈多的路径规划起到的效果更加明显。
关键词:LoRa协议;移动机器人;灰狼優化算法;路径规划
中图分类号:TP242.6 文献标识码:A
文章编号:1009-3044(2022)33-0021-04
1 引言
我国现有扫地机器人多数为室内智能家具产品,对于面向较大面积场地的扫地机器人的研究,目前尚处于发展阶段,尚未投入广泛使用,因此具备较为重要的研究价值。本文拟研发一款基于LoRa无线射频技术,实现低功耗、超大范围覆盖、安全便捷的智能扫地机器人,利用LoRa技术所具备的超长距离、低功耗和安全的数据传输特点,结合连续区域路径规划算法的研究,为大面积场地智能清扫提供一套高效可行的实施方案。
2 方案设计
2.1 总体方案设计
整体方案如图1所示,由控制器控制扫地机器人驱动结构,使清扫机构进行清洁作业,由电源部分提供动力,同时收集传感器的信息反馈,由控制器进行一系列逻辑分析与处理,实现机器人的避障与针对性清洁功能。同时将信息传输给控制终端实时反馈机器人所在位置,经过计算机处理,自主构建地图。
2.2 硬件设计
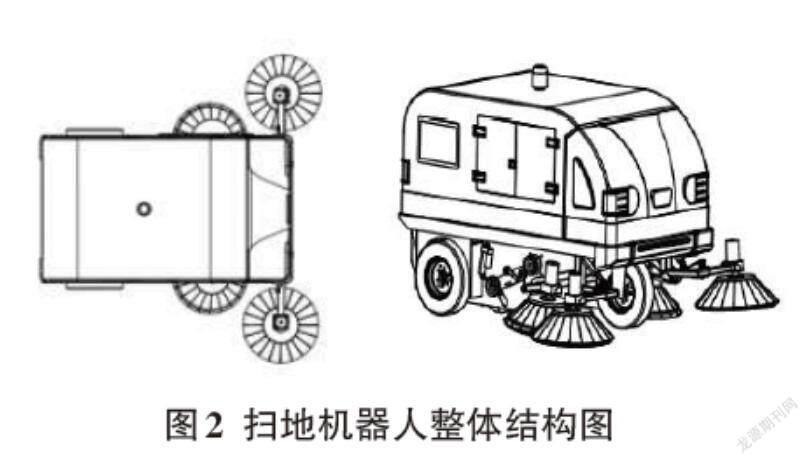
硬件部分作为机器人主体部分,支撑其完成移动、清扫功能,主要由车架、刷盘、吸尘结构、垃圾箱、电动机、驱动板等部分组成。如图2所示为扫地机器人整体结构图,主要由主控制器、驱动机构、清扫机构、传感器等部分组成。驱动结构采用三轮式差速控制,该控制方式机械结构简单,便于安装,且电机功率利用率高,能满足项目低功耗的核心需求。机器人内部为垃圾收纳箱,外表面装有触控屏,既能实现与终端的信息校验,还能调节机器人清扫工作中的一些参数。清扫结构采用多自由度刷盘搭配吸尘结构,有效提高清洁效率。
在主控制器的选用上,本文使用STM32F103C8T6核心板,通过传感器反馈的信息,使用不同指令传递PWM信息给驱动器芯片L298,再由L298的输出控制直流电机的电压输入从而实现电机的启动、停止、加速、减速。L298驱动电路还用于驱动刷盘与吸尘电机,用于清扫与吸尘。另外,还采用了SX1278芯片,利用LoRa扩频工艺实现通信间距高达8Km或者更长的定点传输。
2.3 软件设计
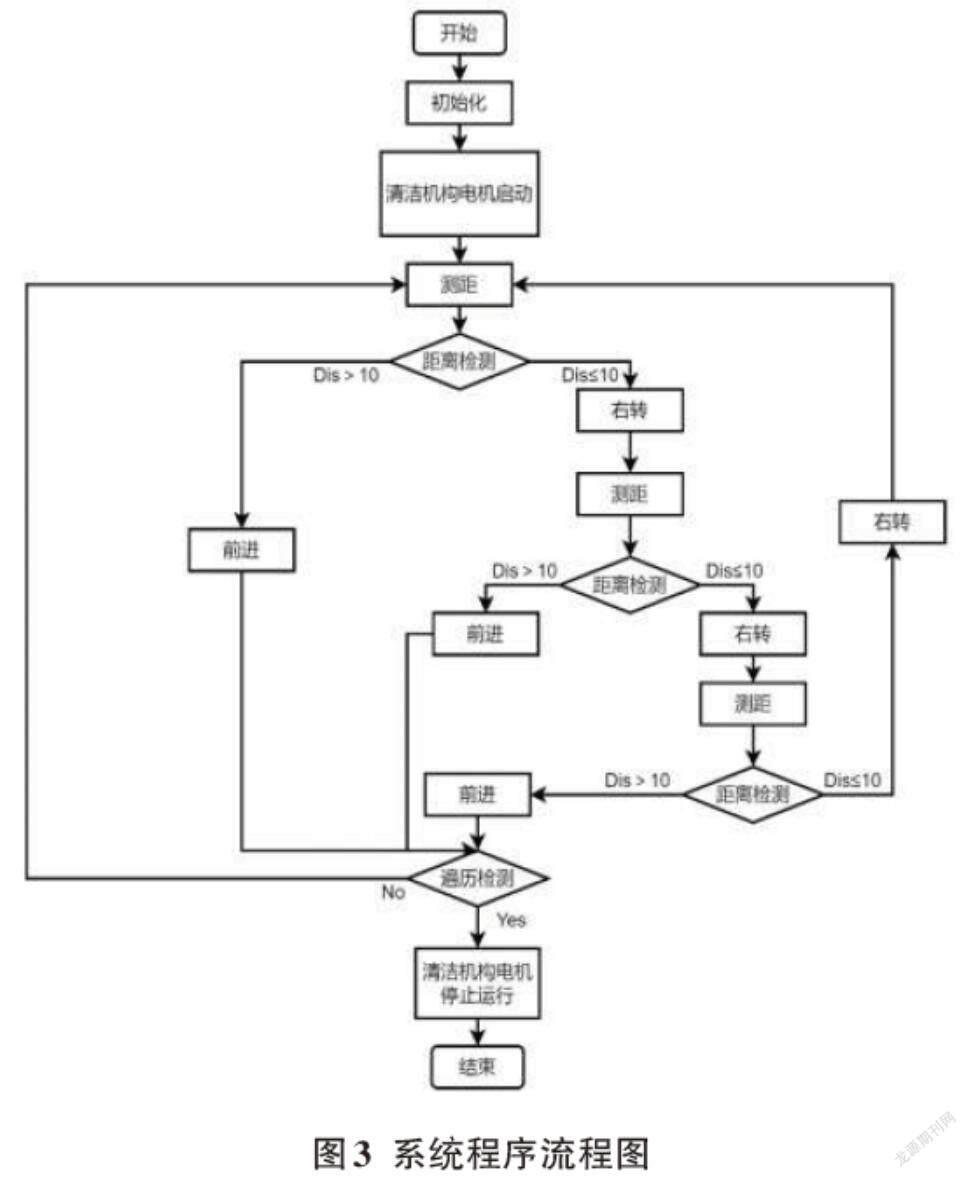
扫地机器人系统程序流程图如图3所示。小车系统初始化后,清洁机构控制电机启动,机器人开始清洁工作,避障模块开始测距,当障碍距离大于10cm时,小车前进;当障碍距离小于等于10cm时,小车首先左转,此时再次检测距离,当距离大于10cm时,小车前进,反之,小车右转;最后再进行一次距离检测,大于10cm前进,距离在10cm内则再向右转;至此,当遍历检测到机器人已经完成清洁任务时,清洁机构停止运行,机器人返回起始工作点。
2.4 LoRa的应用
2.4.1 LoRa的选择
LoRa协议在功率要求、通信范围、通信速率等方面具备很多优点,在点对点通信链路具有较高的精度[1],本文采用SX1278芯片模块,其属于单通道半双工通信,可利用其通道的复用进行多节点通信,并具备功率小、传输距离远、抗干扰性能强的优势。另外,LoRaTM调制技术在数据选择特性和抗阻塞性能上都具有较大的优越性,相对于FSK调制技术在数据传输速率最大时数字精度也更高,因此LoRaTM的优势保证了通信的安全性,并且开放了多种参数可供调节。
2.4.2 LoRa组网方式
由于大场地环境下机器人的需求量较大、节点较多,但每个节点之间的影响关系较小,系统采用经典的星形网络拓扑架构,通过对个人电脑或手机程序的控制,一个服务器可以连接多个LoRa网关,而每个LoRa网关则可以连接将近数万个计算机终端模块。LoRaWAN网络采用易于搭建、简单高效的三级架构,且其所有的通信均为双向通信,既可实现数据的上传又能实现指令的下发。星形网络中,终端设备一般采用单跳与网关相连,极大降低网络流量,减小系统成本,同时也简化了网络。综上,系统最终采用LoRaWAN组网、星型架构,终端采集模块连接至一个网关,由其向上发送给上位机,保存数据。同时加入LoRaWAN的接入安全机制,结合LoRa射频指纹识别技术,提高了LoRaWAN的接入安全性能[2]。LoRa无线通信系统的总体架构如图4(上)所示。
2.4.3上位机软件设计
上位机即应用层,是用来下达命令到LoRa的网关操作终端,并接受感知层上传反馈的数据,初步设计有PC端和手机端两个同功能上位机,手机建立热点,保持流量畅通,这时可以通过App登录客户端。在设备上电,网络正常运行一段时间后,就可以通过客户端查看扫地机器人的实时位置和扫地机器人反馈的路径信息。同时,也可以控制扫地机器人运行和停止。上位机界面如图4(下)所示。
3 路径规划
3.1 建立场地扫地机器人环境模型
当场地扫地机器人在进行路径规划时,对场地扫地机器人所处环境进行合理建模为首要任务。环境模型的主要目的就是得到场地上清扫机器人所处区域的地图,而清扫机器人路径规划也就是在其所构建环境模型的基础上完成的,因此环境建模的合理性直接影响到后续路径规划算法的运算效率与准确性。
3.1.1 環境建模有效信息及其获取途径
场地扫地机器人工作实质在于完成规定大区域内地面环境的清扫作业,同时顺利避开障碍,因此可将其工作环境设置为室外的二维平面模型,其包含区域边界、可清扫地面与障碍,而针对场地扫地机器人的有效信息即为区域边界、可清扫区域、障碍区域三者的位置信息。
对于环境建模有效信息的获取,可分为以下两种情况讨论:一是已经掌握待清扫区域二维电子地图,根据地图信息直接建模;二是面对陌生环境区域,场地扫地机器人通过内置卫星导航定位模块及外设测距模块对环境区域进行学习,在行进过程采集有效信息,在初始化环境模型基础上通过采集边界、可清扫区、障碍区位置数据,实时更新环境模型,并将所得数据进行存储。
3.1.2 基于栅格法的环境建模方案
实际应用中,针对不同区域环境,选择合适的环境建模方案十分重要。基于栅格法的环境建模方案,在场地扫地机器人内置定位模块的基础上,令每一栅格对应一个经纬度坐标,进行精准定位,相比于自由空间法与拓扑法能实现更高的精度;同时栅格法具有建模简单、运算量小等优点,相比几何法具有更高的运算速度。综上所述,本项目采用栅格法进行环境建模。
栅格法所建立的环境模型,即将场地扫地机器人运动区域划分为若干个栅格,并对每一栅格进行赋值来区分其属性,具体数学描述如下:
定义1:用集合[S]表示扫地机器人运动区域,即:
[S=(x,y)|(x,y)为扫地机器人运动区域任意点坐标}]
定义2:可清扫区域栅格值为1,障碍区域与边界栅格值为0,即:
[map(x,y)=1,无障碍0,有障碍]
并记可清扫区域集合为[SY={(x,y)|map(x,y)=1}],障碍与边界区域集合为[SN={(x,y)|][map(x,y)=0}],易得[SY、SN⊆S],[SY⋂SN=0],[SY⋂SN=S]。
定义3:场地扫地机器人清扫过的区域,其栅格值[map(x,y)=2]。
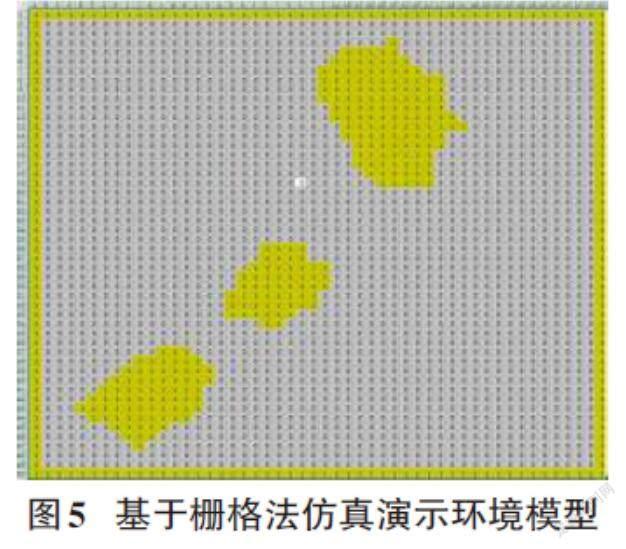
场地扫地机器人通过上述规则建立目标环境数学模型,且方便计算机进行存储,为进一步路径规划算法提供良好的运行平台。本项目基于栅格法上述规则在Excel建立的模拟地图如图5所示。
3.2 基于改进型灰狼优化算法的遍历式路径规划
3.2.1 传统灰狼优化算法(GWO)
灰狼优化算法(GWO)是为了模拟在生态学领域狼群体觅食行为中的过程,所产生的一种人群智能优化算法。狼群有着严密的社会层级组织和组织系统,狼群的最顶层狼为[a]狼(狼群首领),而b狼则为[a]狼的下属狼,必须服从[a]狼的命令,c狼地位仅次于[a]狼和b狼,其余狼为u狼,地位最低。狼群的觅食狩猎活动大致分为搜寻、围困和进攻三个阶段。GWO算法数学模型中,将种群中的每一种候选解法都用一只灰狼表示,并用[a]狼表示最佳解,b狼和c狼表示第二和第三最佳候选的解法,以及剩下的侯选解法为u。设灰狼种群数量为[N],搜索空间为[Dim]维空间,第[i]只灰狼在第[Dim]维空间中的位置向量可以表示为[XDimi],灰狼围捕猎物的数学模型描述如下[3]
[D=C⋅Xp(t)-X(t)] (1)
[X(t+1)=Xp(t)-A⋅D] (2)
上式中[t]代表当前迭代次数,[A]与[C]是系数向量;[Xp(t)]是猎物的位置向量;[X]代表灰狼的位置向量[4]。[A]与[C]的计算公式为:
[A=2a⋅r1-a] (3)
[C=2r2] (4)
上式中[r1]与[r2]的模是[[0,1]]之间的随机数,[a]是收敛因子,随着迭代次数的增加从2线性减少到0。
[a=2-22ttmax] (5)
上式中:[t]为当前迭代次数;[tmax]为最大迭代次数。
灰狼追踪猎物位置的数字模型描述如下:
[D1=K1Xa-xD2=K2Xb-xD3=K3Xc-x] (6)
[X1=Xa-A1DaX2=Xb-A2DbX3=Xc-A3Dc] (7)
[X(t+1)=X1+X2+X33] (8)
上式中:[K1]、[K2]以及[K3]是随机向量;[Da]、[Db]以及[Dc]对应的是[a]狼、b狼、c狼与其他狼群成员之间的距离;[X1]、[X2]、[X3]则分别对应[a]狼、b狼、c狼的位置;[X]是当前狼的位置。
3.2.2 改进型灰狼优化算法(IGWO)
非线性的收敛因子调节策略:对狼群猎杀过程是全局搜寻能力和局部整体研发力量的融合,在常规GWO算法中收敛因数通常是线性地减少的,在现实捕猎流程中人们更期望全局搜寻能力缓慢利于发现全局最优预测解,而局部整体研发力量快速精确地发现了局部最优预测解。线性衰减的收敛因子并不能表现出先慢后快的优点,因此引入了一个非线条收敛因子调整策略,在迭代初期的全局搜寻时收敛因子很大,但非线性变换速度较慢,整体全局搜寻能力增强;在迭代后期的控制参量时收敛因子较小,非线性变换速度快,可在某个范围内寻找最优解,开发能力增强,整体收敛速率提高。
3.3 仿真分析
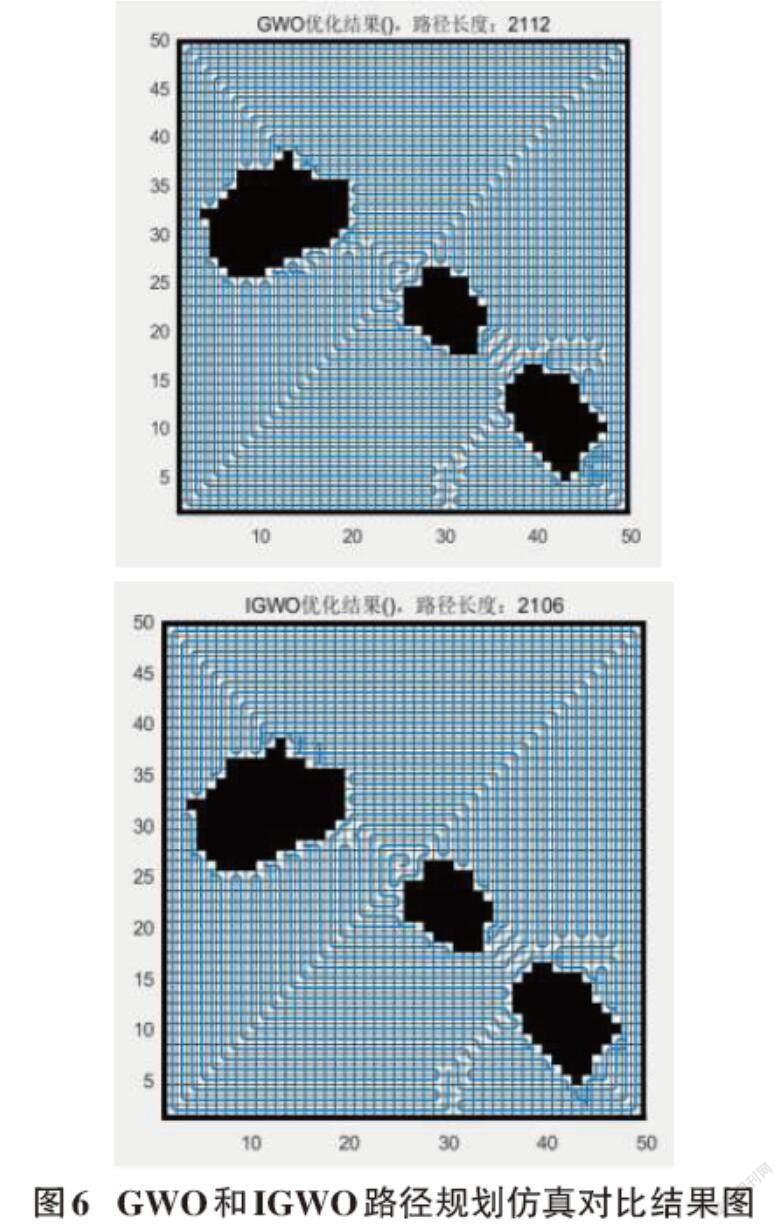
在MATLAB平台建立m文件,对传统灰狼优化算法(GWO)及改进型灰狼优化算法(IGWO)进行仿真实验验证,环境模型同为图6所示Excel栅格法地图模型。传统灰狼优化算法运行结果如图6所示。
根据如上仿真运行结果可以看出,二者均可实现全地图遍历的基本要求,但在路径长度方面,改进型灰狼优化算法规划的路径长度更短,且其路径的优势主要体现在障碍物周围的路径规划方案。由图可知,传统灰狼优化算法在障碍物周围将具有较多的冗余重复路径,而相较而言,改进型灰狼优化算法在障碍区域周围的路径更加优化。由此可得,随着地图复杂程度的增加,改进型灰狼优化算法优势更加显著,可使场地扫地机器人在更简短的路径长度内实现环境区域遍历。
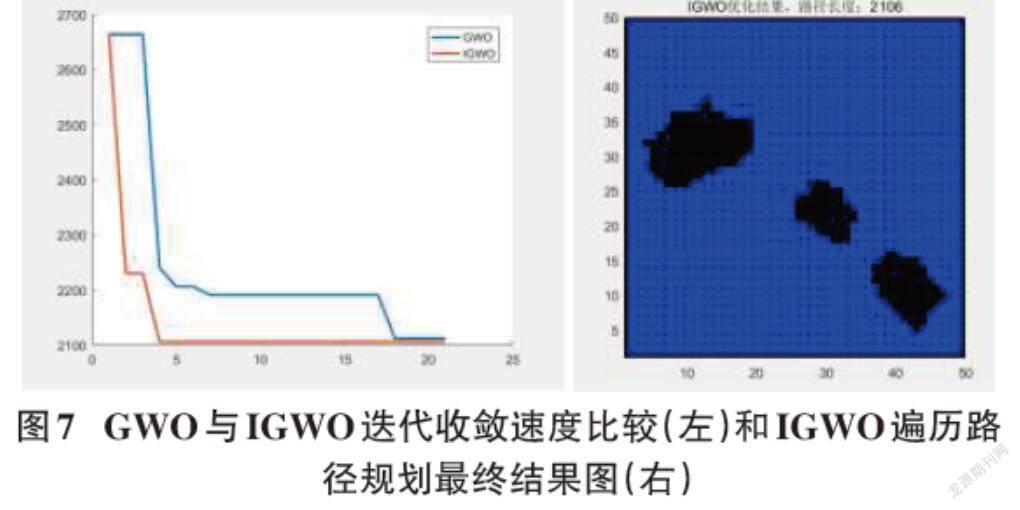
在迭代次数方面,改进型灰狼优化算法具有更快的收敛速度,所需迭代次数更少,大大减少了程序运算次数,提高运算速度。二者收敛速度的比较和遍历路径规划最终结果图如图7所示。
4 总结与展望
笔者已经在多场地情况下,开展了关于遍历式路径规划的研究,应用LoRa协议作为移动机器人的通信基础,在此基础上开发出上位机应用,能够简单地对机器人远程控制和提供较精确的定位。另外,通过选择寻优特性良好的GWO算法并对之加以改进完善,引入非线条收敛因子以平衡全局寻找和局部开发的能力,并引入遗传算法进行二次种群位置更新,以防止搜索寻优进入局部最优的情形[5],进而提高了算法的模型求解能力,也进而提高了算法的模型求解能力,利用IGWO算法可以对处理点进行遍历,求解出处理点的搜索顺序,并進一步优化。在复杂环境下的遍历中具有不错的效果,不易发生局部最优路线通行的情形,而且环境越是复杂的地区路线规划效果就越好。
参考文献:
[1] Bhatnagar O,Surendran N,Alam M M.Development of an algorithm for a target platform-following robot using LoRa signals[C]//2020 11th International Conference on Computing,Communication and Networking Technologies (ICCCNT).Kharagpur,India.IEEE,:1-5.
[2] Chen N,Hu A Q,Fu H.LoRa radio frequency fingerprint identification based on frequency offset characteristics and optimized LoRaWAN access technology[C]//2021 IEEE 5th Advanced Information Technology,Electronic and Automation Control Conference.Chongqing,China.IEEE,:1801-1807.
[3] 李靖,杨帆.复杂障碍物环境下多任务目标遍历路径规划[J].现代电子技术,2021,44(7):162-168.
[4] 张晓凤,王秀英.灰狼优化算法研究综述[J].计算机科学,2019,46(3):30-38.
[5] 李靖,杨帆.基于改进灰狼优化算法的区域监测机器人路径规划[J].科学技术与工程,2020,20(15):6122-6129.
【通联编辑:梁书】
