一种多运动模式仿蛇软体机器人方案设计
2022-03-26沈哲,张禹,王宁
沈 哲,张 禹,王 宁
为了提高对于多种复杂环境的适应性及人机交互的安全性, 软体机器人应运而生。 这类机器人由于制作材料多为硅胶, 具有造价低、 柔顺性好等特点, 仿生机器人是软体机器人的重点研究方向[1]。 通过分析真实生物的运动方式, 设计制作高度还原实际动物的本体结构外形。 目前仿生软体机器人主要有: 爬行类机器人、 水下类机器人、 管道类机器人等。
仿蛇形机械人是爬行类机器人的一大研究方向, 世界上第一台仿蛇机器人是由日本东京大学的Hirose 教授研制带有被动轮的ACM Ⅲ[2], 这款仿蛇机器人由刚性模块正交连接而成, 其在平地上最高行进速度可达40 cm/s。 Gavin miller 研制了每一段驱动器尺寸参数各不相同, 在仿生度上高度还原自然界中蛇的机器人S1-S5[3], 这台机器人只能在二维平面内运动且不具备避障功能, 同样是通过正交连接的传统刚性机器人。 我国的第一台仿蛇机器人由上海交通大学的颜国正等人[4]发明制作, 这款蛇形机器人的微型样机可以在水下运动。
目前, 虽然已经有很多国内外学者完成仿蛇机器人相关的设计制作工作, 但大多还停留在传统的刚性材料和正交连接方式, 纯软体材料制作的仿蛇机器人还鲜有人尝试, 用软体硅胶材料制作仿蛇机器人可以大大提高机器人仿生度, 更加贴近并且还原自然界中蛇的多种运动姿态和轨迹。
本文分析蛇的多种运动模式, 研究制作仿蛇机器人的首部、 颈部、 躯干和尾部, 采用气体驱动方式实现蛇的多种运动模式, 通过改变通入不同段驱动器内的气体的大小和频率使仿蛇机器人整体呈现出不同的运动形式。
1 蛇的运动模式分析
蛇在行进过程中通过肌肉收缩调整鳞片角度,以改变躯干与地面接触部分的面积大小, 从而改变摩擦力并向前行进。 对于生物蛇大体可分为以下几种运动方式[5]:
(1) 蜿蜒前行
蛇从头部开始横向波动, 产生若干个波依次向尾部传递, 其摆动的轨迹类似于正弦波的波形图[6], 与此同时, 与地面接触的弯曲躯干后半部分鳞片翘起, 增大与地面间的摩擦力, 推动地面的同时从地面获取反推力向先运动(见图1)。

图1 蜿蜒前行图
(2) 伸缩运动
当环境狭小受限时, 蛇会首先将躯干收缩成S形, 后半部分紧贴地面提供静摩擦, 前半部分向前伸展, 随后前半部分收缩并紧贴地面, 后半部分向前移动, 如此往复循环(见图2)。

图2 伸缩运动图
(3) 蠕动爬行
这种运动模式是通过肋骨的外伸和内收使得蛇底腹部在膨胀和收缩的切换之间, 与地面间的摩擦力不断变化, 从而缓慢向前蠕动(见图3)。

图3 伸缩运动图
2 仿蛇机器人结构设计
2.1 结构设计
笔者以自然界中的蛇为仿生依据, 提出对仿蛇软体机器人结构设计的普适性方案, 结构上分为头部、 颈部、 躯干、 尾部和鳞片, 体长约在1~1.5 m之间, 躯干宽度不得超过高度的两倍, 该体型能最大程度减小惯性阻力。
头部 多数情况下蛇在行进时, 头部通常是微微翘起的状态, 也就是说头部不参与驱动, 仅用来收集视觉信息并识别, 所以在头部中间位置嵌入一片钢板以实现头部整体形态的固定, 并且为仿蛇形机器人提供一定的刚度, 用硅胶制作可以提高机器人整体的柔顺性和仿生效果。
颈部 颈部的作用是使头部进行各个方向的转向, 是蛇形机器人的主要转向部位, 所以要求颈部有更高的自由度, 本次设计颈部包括四个独立型腔( 见图4) , 当同时给型腔1 和型腔2、 型腔3 和型腔4、 型腔1 和型腔4、 型腔2和型腔3 通入气压时, 就会产生向上、向下、 向左、 向右的弯曲效果, 软体驱动器内腔外侧采用褶皱式腔体结构, 这种结构的好处在于通气时产生的径向膨胀很小, 不会产生“ 气球式” 膨胀, 而中性面的加入则会限制型腔的轴向伸长, 使型腔通气时的弯曲效果更佳。

图4 颈部型腔图
躯干 躯干是产生整体运动的驱动器部分, 为满足仿蛇机器人多种运动模式的需要, 软体驱动器采用三段式左右独立褶皱式型腔结构, 褶皱式型腔能够最大限度将气压转化为弹性势能, 将摆动最大化。 底部采用横向和竖向两种方式布置鳞片, 横向鳞片提供前进推力, 竖向鳞片产生各向异性, 当内部型腔通入气压膨胀以后, 另一侧驱动器会向中心收缩, 使躯干呈弯曲姿态, 周期性通气使蛇身整体产生波动形态向前运动。
2.2 气管内嵌式设计
目前, 大多数软体气动仿生机器人气管的布置为: 连接在腔体两端, 这样布置的好处在于方便快捷, 制作样机过程中在粘接硅胶时无需考虑内腔结构是否会与内嵌的气管产生干涉, 但弊端显而易见, 仿生还原度差, 外露在机器人两端的部分气管还有可能影响到整体机器人的运动。
本文仿生机器人气管的具体连接方式为: 在将三段驱动器首尾粘接之后, 气管由尾部嵌入, 并用液体状硅胶将通入气管的管口处密封黏合, 由中性面隔开对称分布, 气管在内腔空间中的螺旋形状是内嵌式设计系统的一个关键点, 它允许三段驱动器在运动中的膨胀、 收缩和弯曲。
2.3 整体模型
通过对仿蛇软体机器人头部、 颈部、 躯干、 尾部、 鳞片及内部气管的设计和布置, 得到整体模型的设计方案( 见图5) , 装配体由头部、 颈部转向器、 第一段驱动器、 第二段驱动器、 第三段驱动器、 尾部、 气管、 传感器等结构组成, 按照先主后次原则进行装配。

图5 整机爆炸视图
3 仿蛇机器人样机制备
本文通过FDM 方案设计机器人所用模具, 采用3D 打印机制备模具, 通过浇筑工艺完成仿蛇形机器人各部件的制作, 最后粘接各部件组成机器人样机。
3.1 制作模具
首先, 通过三维软件设计出仿蛇软体机器人的头部、 颈部、 躯干、 尾部和鳞片的三维模型, 通过软件中的组合功能制作出每个部件相应的上模具和下模具, 在设计模具的过程中要注意: (1) 模具应保证倒入液态硅胶和固化剂混合物之后模具的密闭性; (2) 硅胶在静置冷凝后可以从模具中完整取出且不破坏模具; (3) 模具边缘不能过薄, 模具整体应具有一定刚度, 确保脱模过程顺利进行。
3.2 制作样机
制作仿蛇软体机器人样机共有五个流程, 分别是混合硅胶与固化剂、 实物浇筑、 静置固化、 成形脱模及粘接成形。
(1) 混合硅胶与固化剂
首先配置制作机器人硅胶原料的混合物, 按照1.5∶100 的比例将固化剂与硅胶进行混合调配, 由于温度原因该比例在夏季要略高于1.5, 冬季略低于1.5, 在硅胶中倒入固化剂后搅拌5~10 min, 之后放入真空泵中抽气, 将混合物中的气泡充分吸出。
(2) 实物浇筑
首先在下模具中均匀喷洒一层脱模剂, 再将准备好的硅胶与固化剂混合物倒入下模具, 静止5 min, 让混合物内的气泡充分溢出后再扣合上模具。
(3) 静置固化
将倒入硅胶固化剂混合物的上、 下模具放入恒温箱中加速固化速率, 静置5 h 后即可开始脱模。
(4) 成形脱模
起模前先检查硅胶是否已经完全固化, 起膜中注意不能破坏下模具的边缘, 以便于下一次的浇筑。 取出的硅胶实物存在由气泡导致的缺口时, 可在缺口位置补一些硅胶。
(5) 粘接成形
脱模成形后的多个部件由首部到尾部依次粘接, 每次粘两个相邻部件, 粘接材料采用硅胶与固化剂的混合物, 注意粘接材料混合物中的固化剂含量应该多于机器人部件中混合物固化剂的含量。 因为气管属于内嵌式设计, 所以要从首部到尾部依次粘接, 所有气管从尾部与第三段型腔之间留出的气孔中通出(见图6)。

图6 实物图
4 仿蛇机器人实验测试
对制作完成的仿蛇软体机器人进行蜿蜒前行、伸缩运动, 以及直线蠕动三种运动模式进行测试,为将来完善优化纯软体制作的多运动模式仿蛇形机器人提供数据和参考。
4.1 蜿蜒前行运动测试
本节对制作完成的仿蛇软体机器人样机进行蜿蜒前行运动模式的测试, 测试内容包括机器人是否能实现蜿蜒运动步态, 以及该运动模式下的位移和速度。 本文设计的仿蛇软体机器人分三段驱动, 每段驱动器由中性面隔开成各自独立的气腔, 也就是说机器人驱动器部分共有六个型腔。 在进行蜿蜒运动时, 通过同时对第一段驱动器左腔、 第二段驱动器右腔和第三段驱动器左腔通入相同气压, 使机器人躯干呈S 型, 对这三个气腔放气, 同时对相反气腔内通入同样压强, 此时机器人躯干呈现出反S型, 不断重复上述通气方式, 使仿蛇软体机器人以蜿蜒前行运动模式行进(见图7)。

图7 蜿蜒前行运动周期图
设定每段驱动器充气时间为3 s, 放气时间为2 s, 机器人完成一个蜿蜒前行运动周期需要10 s,记录下机器人前进一个周期位移为3.4 cm, 得出仿蛇软体机器人蜿蜒运动模式下前进速度为3.4 mm/s。
4.2 伸缩运动测试
仿蛇软体机器人在进行伸缩运动时, 是通过前部分躯干伸展为S 型曲线拉动后部分躯干向前伸展, 所以对机器人内腔通气顺序为: 首先第一阶段向第一段驱动器右腔和第二段驱动器左腔通气压,第二阶段对第一段驱动器放气, 保持第二段驱动器通气状态, 同时对第三段驱动器右腔通气, 最后第三阶段对第一段驱动器右腔通气, 对第二段驱动器放气, 第三段驱动器保持通气, 完成一个完整伸缩运动周期(见图8)。
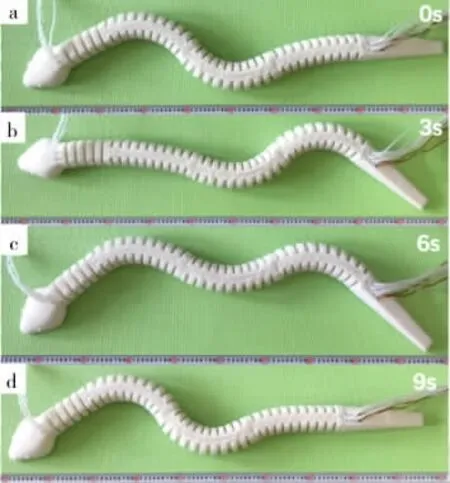
图8 伸缩运动周期图
记录仿蛇形软体机器人伸缩运动一个完整周期所需时间为12 s, 前进位移为3.2 cm, 得出速度为2.6 mm/s。
4.3 直线蠕动测试
仿蛇软体机器人的直线运动模式较为简单, 原理与蠕虫的蠕动运动类似, 三段驱动器由从首至尾依次通气, 然后依次放气即可(见图9)。

图9 直线蠕动周期图
仿蛇软体机器人直线蠕动完成一个周期为18 s, 前进位移2.9 cm, 得出速度为1.61 mm/s。三组实验结果表明: 本文制备的机器人可以完成三种运动模式且蜿蜒前行模式的速率最高, 与自然界蛇类运动情况一致。
5 结 语
本文通过分析生物蛇三种运动模式的行进机理, 通过建模绘出模具并用3D 打印机打印, 调配硅胶与固化剂的混合物, 浇筑制作部件, 最后粘接实物成形。 对制作好的实物进行三种运动模式的测试实验, 记录运动位移和时间, 通过比较得出仿蛇软体机器人在蜿蜒前行运动模式下的速率最高, 符合实际生物蛇的运动情况和特点。
