舰载无人直升机着舰时机判定及复飞程序研究
2022-03-24谢欣宏
谢欣宏
(中国飞行试验研究院飞机所,陕西 西安 710089)
舰载无人直升机由于低成本、零伤亡,良好的低空/超低空飞行能力,以及对起降环境较小的依存性等诸多优势,从其出现之初便被应用于侦察探测、通信中继和海上反潜等多个作战环节[1]。美QH50 系列舰载无人直升机作为最早投入应用的军用无人直升机,出现于20 世纪50 年代,是早期遥控式舰载无人直升机的典型代表。随后,多国的海军部门均高度重视舰载无人直升机的发展,研制并衍生出了众多的型号,典型型号有美火力侦察兵系列;奥地利坎姆考普特(Comcopter)系列;俄罗斯Ka137多用途无人直升机等[2](图1)。

图1 舰载无人直升机舰面起降示意图
同有人直升机相似的是,舰面起降过程中会面临由于海上严苛气象环境、舰面复杂流场环境、起降区域受限等客观条件引发的问题和挑战。作为无人化装备,缺乏有人机舰面起降作业时飞行机组与塔台指挥之间畅通有效地沟通,其舰面自动起降能否可靠施行在很大程度上取决着舰时机的选择,而如何有效地选择着舰时机与舰-机各系统间的信息交互能力、着舰引导设备及助降装置的功能性能、着舰过程中控制逻辑的合理性等要素密切相关。
综合以上因素,无人直升机的舰面自动起降过程中对着舰时机的判定,面临的是技术复杂、难度大、风险高的特点,需综合分析影响着舰的若干关键因素,得出无人直升机着舰时机判定,的核心要素,并制定无法着舰时能有效规避风险的复飞程序,保障后续舰载无人直升机型号进行舰基试飞顺利开展,提升装备在作战应用中的效能。
1 无人直升机舰面起降影响因素分析
无人直升机,与有人直升机舰面起降相比,其影响因素有共性的部分,也有其独有的特殊性的部分。在载舰几何特性、直升机自身气动及操纵性、舰面流场特性和载舰非线性运动状态等方面,无人直升机舰面起降过程中面临着同样的挑战,而由于无人技术的应用,有效规避了与飞行员相关的人员舒适程度、驾驶目视感受等因素,但新技术的应用也引入了着舰引导精度、着舰控制策略合理性、起降环境感知准确性和电磁敏感性等影响因素。
1.1 有人/无人舰载直升机共性影响因素
1.1.1 舰面流场特性
直升机载舰的上层建筑复杂多样,在着舰平台前方或单侧一般均布置有长方体机库或舰岛,其表面为面积较大的长方形平面,且各面的交接处多为较为尖锐的直角。上层建筑的垂直面会导致气流在着舰平台上方较大的范围内进行循环流动,产生涡流区[3]。另外,载舰的桅杆等其他上层建筑,以及舰身上较为尖锐的转角等也会在着舰平台上方产生高度扰动的气流。
为评估舰面流场特性对直升机舰面飞行、气动特性的影响,开展CFD 计算工作,对一定舰桥合成风速、风向条件下载舰着舰平台上方的流场特性进行评估分析。图2 所示为典型舰桥合成风速、风向条件下,某型两栖登陆舰CFD 流场计算结果。
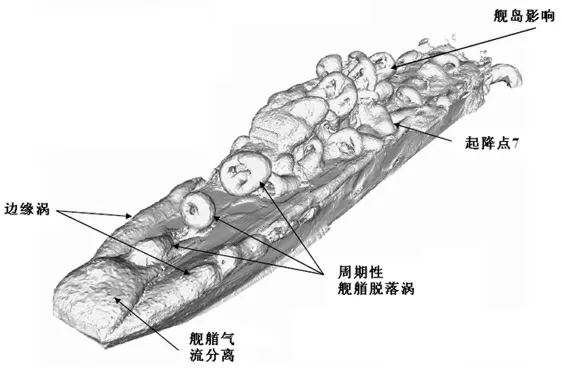
图2 某大型舰船流场CFD 计算结果示意图
分析上述结果,并综合考虑国内外其他相关研究结果,可以发现以下几点规律:
(1)在着舰平台上方,直升机主旋翼受到明显的下洗流场干扰,使直升机处于类似爬升的启动状态。
(2)相较于一定相对风速风向的稳定飞行状态,在着舰平台上方及其周边横向气流扰动明显,改变了直升机的操纵需求。
(3)可预见随着舰桥合成风速的增大,载舰着舰平台上方的气流扰动也越发显著。
1.1.2 载舰几何特性
直升机舰上起降(作业)平台面积狭小,且周围有较多的障碍物,舰面作业空间条件较为恶劣[4]。以美海军斯普鲁恩斯级驱逐舰为例,其满载排水量达8 040 t,已经是一种较大吨位的海军舰船了,但其直升机起降平台仅为长约21 m、宽约12.5 m 的平台。在极端情况下,SH-60B 直升机在该型舰上着舰时,其桨尖距离最近的上层建筑的最小距离仅有1.2 m,或者其尾起距离着舰平台的后缘的最小距离仅有0.76 m。
1.1.3 载舰非线性动态运动
直升机舰面作业也受到载舰运动情况的影响。载舰的运动特性主要由舰身几何尺寸、装载情况、载舰自身的舰速/舰向和海况条件等因素确定。大部分直升机的飞行手册中均给出了直升机斜坡着陆的坡度限制,类似地,直升机舰面起降时载舰的纵、横摇角度限制主要受到结构完整性、操纵以及起落架刹车能力等因素的影响,在制定舰载直升机舰面起降包线时,需给出载舰纵、横摇角度等姿态限制。
1.2 无人直升机着舰影响因素特性
1.2.1 着舰引导精度
着舰引导是无人直升机从目标作业海域按照返航航线飞抵载舰附近机舰交会点后,按照下滑进近,悬停跟进、上舰的步骤逐步逼近着舰点的过程[5]。在此过程中需要精确测量无人机的位置,精确控制无人机的轨迹,因此,解决好在摇摆平台上的准确测距、测角和定位问题,实现高精度的着舰引导关系到无人直升机能否按照预先设定的航线到达指定位置。现在常用的引导方式主要有雷达引导和差分卫星,通过在载舰上安装引导雷达或卫星基站与无人机进行相对位置、位置偏差等信息的交互,实现高精度引导,但都在一定程度上存在受到电磁干扰导致精度降低的情况。
1.2.2 起降环境感知准确性
无人直升机系统的起降环境感知包括两个部分,一是由安装在无人直升机平台上的激光雷达、无线电高度表和若干环境感知传感器等设备主动进行环境探测获取的着舰环境信息,提取出可利用的特征信息对无人直升机进行导航;二是接收来自载舰的舰船运动信息,对信息进行融合处理,实现对舰船甲板的运动姿态的实时准确预估,确保无人直升机在舰船静息期快速着舰[6]。
其中对于静息期的判定是环境感知中的核心环节,静息期的概念可以进行如下定义:在高海况下,视风浪引起的舰船甲板运动为一平稳随机过程,在4~20 s 的海浪统计周期内,存在一个或多个时间段使得舰船六自由度运动满足一定的阈值,在该阈值范围内无人直升机可进行安全起降[7]。
1.2.3 着舰控制策略合理性
着舰的过程是无人直升机自动起降全过程中的末端也是最为核心、风险最为集中的一环,无人直升机完成下滑进近转入悬停跟进后就进入到了着舰阶段的关键环节。在着舰过程中,飞控系统需要实时判别来自环境感知模块的相对位置信息、舰船运动状态信息,以做出下一步动作的指令。因此,着舰阶段控制策略的制定,尤其是与着舰位置及着舰可接受载舰运动相关的判据的设定就十分重要,满足判据要求则按照跟进上舰、高位悬停检查、低位悬停检查及快速着舰的过程完成着舰,若该过程中存在某一环节判据不满足,则进入复飞程序。
1.2.4 电磁敏感性
舰面环境在狭小的空间内,高度集中地布置了多种雷达系统、电子设备和武器系统以及电磁干扰系统,电磁环境复杂。无人直升机系统的正常运行,高度依赖链路间的信息传输,复杂的电磁环境可能会导致链路信号不稳定,一些较强的电磁脉冲干扰甚至可能造成机上电子元器件的损坏,导致安全事故。
2 基于典型着舰引导飞行剖面的着舰时机判定准则
2.1 舰载无人直升机典型着舰飞行剖面
通常舰载无人直升机的自主着舰过程包括下滑进近、悬停跟进、快速下降着舰3 个阶段。
(1)下滑进近:无人直升机返航抵达机舰交汇点后,根据当前采集到的舰船航向、航速及相对位置信息,规划一条理想的下滑轨迹,导引无人直升机至舰船尾部,与舰船保持一定的相对距离和相对速度。
(2)悬停跟进:如图3(a)所示,无人直升机进行自身位置、速度及航向的调整以保持与舰船同步,根据设定的航迹导引无人直升机移动至舰船着舰点上方。
(3)快速下降着舰:如图3(b)所示,导引无人直升机进行稳定下降,到达安全高度后,捕捉理想着舰时机。当捕捉到理想着舰时机后,控制无人直升机快速下降完成着舰。
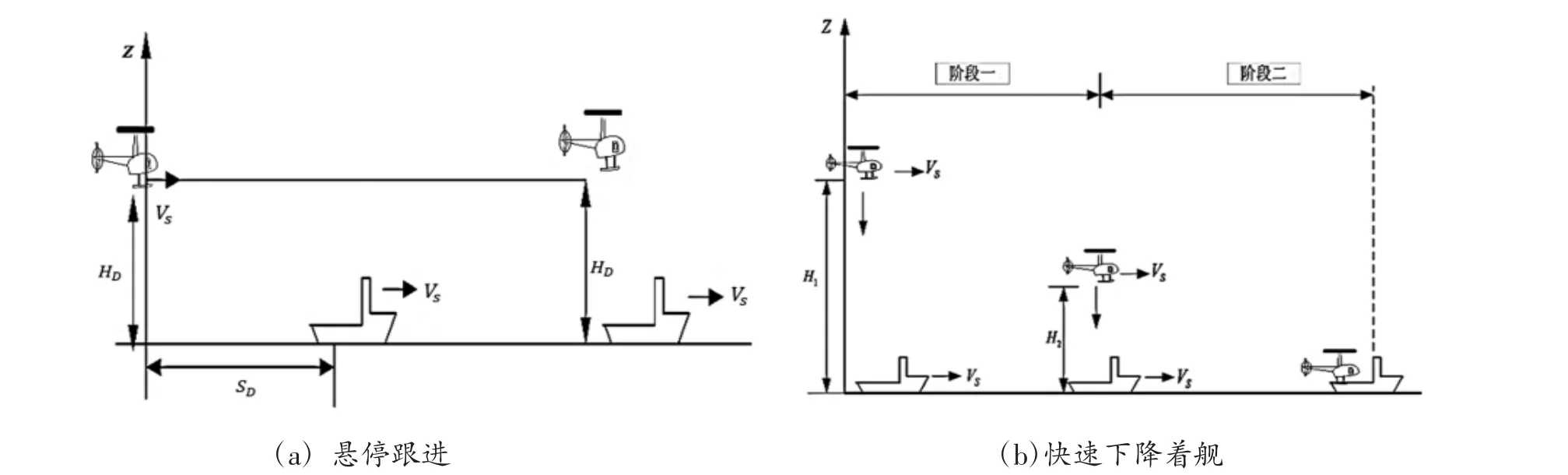
图3 无人直升机典型着舰过程示意图
2.2 着舰时机判定准则
无人直升机从悬停跟进至起降位上方悬停起,便进入了着舰时机判定的阶段。如图4 所示,当无人直升机在起降位上方悬停时,来源于机载传感器或载舰相关信息源包含载舰运动状态、无人机平台各系统工作状态、舰面环境等信息都传递到无人直升机信息融合系统中支撑飞控系统进行着舰时机的判定,基于无人直升机典型着舰飞行剖面,结合前文对无人直升机着舰影响因素的分析,提出包括3 个主要部分的着舰时机判定准则如下:
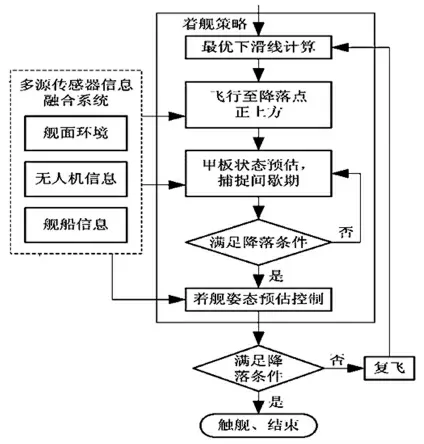
图4 无人直升机着舰时机判定逻辑框图
(1)无人机平台各系统工作状态:
a. 发动机扭矩、发动机T45 温度等发动机状态参数是否具备合理安全余量,通常余量不小于10%。
粒子群算法是模仿鸟类的觅食行为,从随机解出发,通过迭代寻找最优解,通过适应度来评价解的品质,具有较好的健壮性和收敛性[8]。利用粒子群算法对LED阵列优化的步骤如下[9]:
b. 检查确认各操纵舵机是否具备合理安全余量,通常余量不小于10%。
c. 根据无人直升机姿态角相关信息判断无人直升机是否处于稳定飞行状态。
d. 检查确认包括无线电高度表在内的各环境感知传感器是否正常工作,避免出现对着舰环境的误判。
e. 检查确认各波段链路工作状态正常,信息收发稳定,未出现影响飞行安全的数据丢包、信号丢失等情况。
(2)载舰运动状态
a. 载舰航向是否稳定。
b. 载舰横摇、纵摇角度是否在安全着舰包线范围内。
c. 载舰横摇、纵摇角速度。
(3)舰面环境信息
a. 检查确认舰面是否存在障碍物或易被吹起的漂浮物。
b. 舰桥合成风速、风向是否在无人直升机舰面起降风限图范围内。
c. 无人直升机悬停位置与理想着舰点之间的相对位置信息。
当以上条件都得到满足时,无人直升机可执行着舰程序,着舰过程要求“快、准、稳”,即要求无人直升机在捕捉到静息期后,快速启动着舰程序,同时也要在下降高度过程中持续调整控制相对于理想着舰点的位置偏差,虽然要求从舰面悬停到触舰的过程耗时尽可能短,但由于起落架结构强度的限制,也避免在大速度着舰后发生剧烈的回弹,通常要求触舰时的下降率不大于2~3 m/s,实现平稳着舰。
3 舰载无人直升机复飞程序设计
复飞是指在无人直升机引导着舰过程中,由于任务变更或不具备着舰条件而中止着舰,并按照预定复飞轨迹飞离载舰,随后按照预先注入或新增的复飞航线飞行的过程,合理的复飞程序设计是保障舰载机安全起降的有力措施。
对于固定翼无人舰载机,平台本身状态或舰面拦阻装置等不满足安全着舰要求时,启动复飞程序。由于其飞行特性,启动复飞后也需要在飞行甲板上滑行进行再次起飞,但其复飞等待航线及复飞等待判断点的设计值得参考借鉴。固定翼无人机在滑出跑道复飞后在抵达复飞等待判断点前,对无人机状态及舰面环境等是否满足着舰要求做进一步判断,若可着舰则下滑飞行准备着舰,若不满足着舰要求则继续复飞等待。
本文提出的无人舰载直升机的复飞程序设计如图5所示,当无人直升机状态或载舰运动状态、舰面环境不满足着舰要求时,启动复飞程序。在理想状态下,要求无人直升机在触舰前都能中止着舰转入复飞,无人直升机启动复飞程序后依照图示步骤,从低悬停位拉高至高悬停位,减小前飞速度/小速度后飞的同时继续提升高度脱离载舰甲板,保持高度进一步后飞脱离飞行甲板,在复飞等待判断点跟舰飞行,再次检查判断无人直升机是否满足着舰条件,若满足则进入正常的着舰程序,若不满足则转入备降航线飞抵备降机场。

图5 舰载无人直升机复飞示意图
4 结论
(1)本文在吸纳有人舰载直升机舰面起降成熟经验的同时,针对无人直升机的技术特点,归纳总结出影响无人直升机舰面起降的主要因素,包括舰面流场特性、载舰几何特性、载舰动态运动特性、着舰引导精度、着舰控制策略合理性等。
(2)以舰载无人直升机典型着舰引导飞行剖面为牵引,并结合前文得出的着舰主要影响因素,提出了包含无人机平台各系统工作状态、载舰运动状态、舰面环境信息3 个方面,每个方面涵盖若干细则条目的无人直升机着舰时机判定准则,对后续舰载无人直升机型号进行舰基试飞和作战应用具有重要指导意义。
(3)基于无人直升机的飞行控制特点,借鉴固定翼舰载无人机的复飞程序设计相关思路,提出了适用于舰载无人直升机包含复飞等待判断点、复飞轨迹、备降航线几个要素在内的复飞程序。该程序作为着舰程序的子模块,能有效规避风险,保障舰面作业安全开展。
