模糊PID 控制在水肥一体机肥料原液混合系统中的应用
2022-03-24魏显文孙国亮
魏显文,孙国亮,魏 堃,杨 超
(武威职业学院,甘肃 武威 733000)
常见的水肥一体机在配制肥料原液时多为手控配液、机械配液,即利用单片机、PLC 控制流量阀的开度,进行液体按比例配制,效率低下。PID 控制器有效解决了手控和机械配液效率低的问题,配比精度也有所提高。但在实际生产现场中,灌溉肥水需求的浓度不固定,由于参数整定复杂,常规PID 控制器往往会出现参数设置不佳、控制精度不高,对实际生产的适应力较差,已经难以满足更高精度要求,且难以实现实时控制。
基于此,本文将模糊PID 控制算法应用于水肥一体机肥料原液混合系统中,旨在有效解决以上问题,且该系统能有效避免流量阀开度差异过大引起的混合液比例失调。
1 灌溉肥水配制系统的工作原理
肥水的配制以水溶肥A、水溶肥B 和水为原料,按照用户实际所需要的比例浓度进行搅拌,并实时检测混合液的酸碱度,加入少量的酸液,保证肥水的酸碱度达到灌溉用水的标准。为了适应不同用户对于肥水的不同需求,本系统在上位机设置可以按照不同品种、不同比例进行配制。在配制过程中,2 种水溶肥用浓度比的方式计量,若浓度比发生偏差,则以水溶肥A 的流量为标准,通过改变水溶肥B 的流量来调节2 种成分的浓度比。
混液装置主要由浓度检测变送单元、比较环节、模糊PID 控制系统和流量阀组成。系统中需要控制的变量为混合液中成分A、成分B 浓度的比值,其控制流程如图1所示。首先由浓度检测变送单元检测出2 种成分的浓度,并转换为浓度比,送入比较环节。比较环节内实现浓度比与设定值比较后求出偏差和变化率,再将二者送入模糊推理环节,经模糊推理后实时整定PID 参数,PID 控制器控制执行机构调节流量阀B 的开度,使2 种成分的浓度比尽快达到并稳定在设定值。
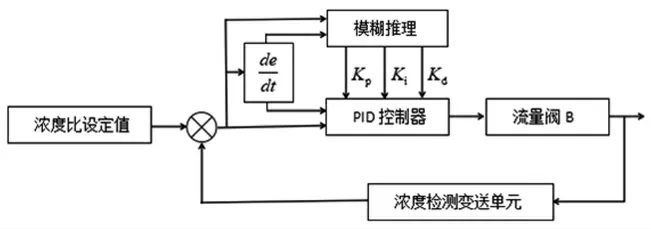
图1 肥料原液混合控制系统
常规PID 离散控制算法:

式中Kp、Ki、Kd分别为比例增益、积分增益、微分增益,加入模糊推理环节后,3 个值将不再固定,而是能够根据浓度比的变化和变化率实时自动调整,即3 个值变为Kp+ΔKp、Ki+ΔKi、Kd+ΔKd。
2 肥水配制模糊PID 控制过程
首先浓度检测变送单元会检测到2 种成分的浓度比,经过比较环节得到与设定的浓度比的偏差e,以及当前偏差和上一时刻偏差的变化ec,即偏差变化率。例如设定成分A 与成分B 的浓度比为2∶1,此时检测到浓度比为2.2∶1,而上一时刻浓度比为2.3∶1,则e 为0.2,ec为2.3-2.2=0.1。
2.1 变量模糊化
以e 为例,检测到的浓度比是有范围的,即浓度比与设定值偏差在一个区间内,设该系统中浓度偏差范围为±0.6,因此将偏差e 量化于[-0.6,+0.6]区域内。允许的浓度偏差变化率范围为±0.15,将其量化于[-0.15,+0.15]区域内。将二者变换至模糊集论域[-3,-2,-1,0,1,2,3],根据需要将其一一对应为“负大(NB)”“负中(NM)”“负小(NS)”“零(ZO)”“正小(PS)”“正中(PM)”“正大(PB)”7个等级,对应的模糊控制规则见表1。
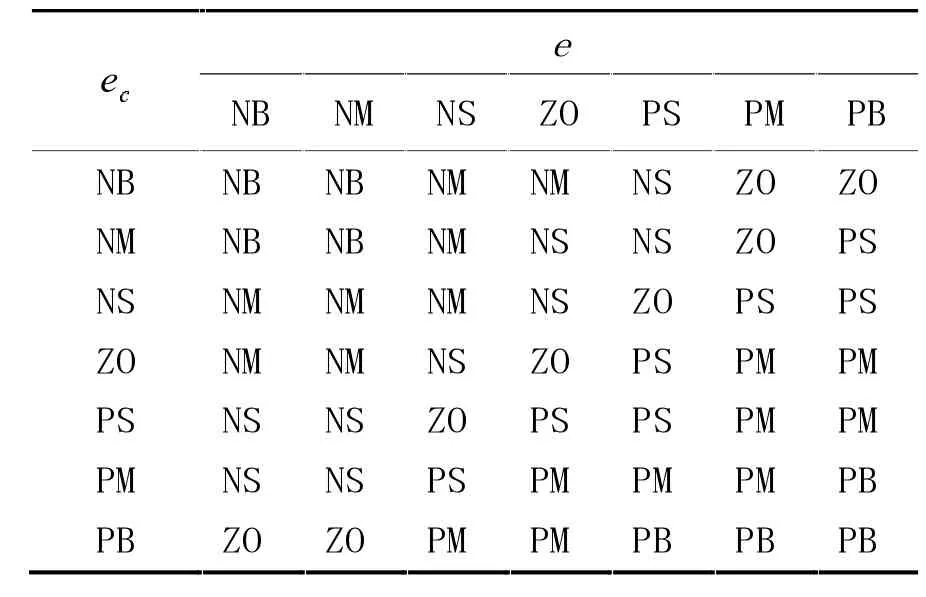
表1 模糊控制规则表
2.2 确定控制规则
根据表1,可以归纳出49 条控制逻辑规则,均由生产及工程技术人员总结和实践操作经验得出。如:IF(e is NB)and(ecis NM)then(ΔKpis PB)(ΔKiis NB)(ΔKdis NS),其含义为如果偏差为负大,偏差变化率为负中,为尽快消除负偏差,比例增益变化应取正大,积分增益变化应取负大。同时,因偏差变化呈负增长趋势,微分增益变化应适当取负小,防止偏差变化过快导致正向偏差,最终能到到新的增益分别为Kp+ΔKp、Ki+ΔKi、Kd+ΔKd。
又如:IF(e is ZO)and(ecis PB)then(ΔKpis NM)(ΔKiis PM)(ΔKdis ZO),其含义为如果偏差和偏差变化率分别为零、正大,则对应的ΔKp、ΔKi、ΔKd分别为正大、正中、零,其余47 条规则不再一一阐述。
2.3 解模糊化
以上PID 参数的修正值是通过模糊推理得到的,即ΔKp、ΔKi、ΔKd仍为对应的等级,必须将其转化为数字量才能与原有增益相加得到新的增益,该过程就为解模糊化过程。本系统中采用工业控制中广泛应用的加权平均法,根据上述方法,利用Simulink 仿真得到ΔKp、ΔKi、ΔKd的模糊查询表,通过查表得到ΔKp、ΔKi、ΔKd的数字量就可以对Kp、Ki、Kd进行修正。该过程是1 个动态过程,调节过程中若偏差和偏差变化率发生新的变化,3 项增益也会实时调整,达到最优控制效果。
3 Simulink 仿真与结论
为了简化整个仿真过程,我们将水溶肥A 对应的流量阀A 设定为1,通过改变调节阀B 的开度,来控制2 种水溶肥的流量,从而改变混合液中2 种成分的浓度。水溶肥B 的流量与流量阀B 开度有关,其开度不同,流速不同,溶液中成分A、B 浓度就不同。本系统中将流量阀B等效为一阶惯性环节,其传递函数为:

其中,K 为流量阀B 增量;T 为流量阀B 的时间常量。若考虑到该系统存在滞后,设其滞后时间为τ,此时传递函数变为:

该仿真模型中取K=2,T=2,τ=3 s。其输入为2 种成分的浓度比,通过模糊PID 控制,调节流量阀B 的开度,输出为2 种成分的实际浓度比,经反馈环节与设定值比较,通过模糊控制实时调整PID 控制环节的参数,使实际浓度比快速达到设定值。在仿真模型中加入Uniform Random Number 模块,模拟实际生产中存在的杂质影响、检测误差等系统干扰。
假设当前输入为2.0,两种方式控制效果如图2 所示。可明显看出,采用模糊PID 控制,超调量为5%左右,而常规PID 控制的超调量为35%,且存在明显振荡; 采用模糊PID 控制,其调节时间为3 s,比常规PID 控制快了接近3 s;在10 s 时间内,常规PID 控制系统最终达到的流量比约为1.98,未能达到设定值2.0。
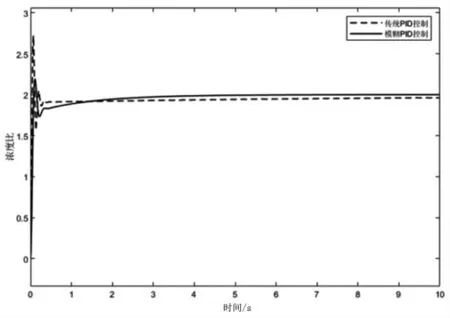
图2 模糊PID 和常规PID 控制效果对比
假如改变浓度比的设定值为1.5 和2.5,再次进行仿真,模糊PID 的控制效果对比如图3 所示。可以看出,随着浓度比设定值的增大,仿真结果超调量也变大,调节时间也变长,但不管哪一种浓度比,模糊PID 控制总能达到控制要求且系统稳定性良好。

图3 不同浓度比设定值下的仿真效果对比
综上所述,在水肥一体机中使用模糊PID 控制,能够使肥水达到精确的浓度比,且配制时间短,配置过程中浓度不会出现大幅跳变。此外,需要配制不同浓度的肥水时,常规PID 控制除改变浓度比设定值外,为达到好的控制效果,还需要重新整定参数,比较繁琐,而模糊PID 控制只需要改变设定值,相关参数经模糊推理过程会自行达到最佳,比较简洁。因此,模糊PID 控制在水肥一体机肥水配制中具有较强的应用价值。
