联合多雷达与ADS-B 的监视数据融合与误差配准方法
2022-03-24王吉
王 吉
(中国民用航空东北地区空中交通管理局黑龙江分局,黑龙 江哈尔滨 150006)
广播式自动相关监视ADS-B(Automatic Dependent Surveillance-Broadcast)系统作为获取、规划广播飞机位置、航向和航速等信息的重要载体,精确获取目标的位置模式和位置信息至关重要。当前,空管自动化系统主要采用单一的雷达处理方式[1]。单个雷达对系统目标的偏移和旋转相对固定,不会影响系统对目标的跟踪和相对位置与速度的估计[2-3]。然而,采用多个雷达进行组网监视时,需要融合多个雷达的目标量测信息,融合后的信息在实际中存在系统信息误差比理论误差大的问题,导致同一轨迹量测互联失败,系统航迹的跟踪与规划能力降低[4-6]。
为此,针对多雷达在空域多目标跟踪中受系统误差的影响,通过结合当前ADS-B 技术与特点,本文提出自适应交互式多模型滤波的方法,来改善ADS-B 系统在多雷达组网过程中的数据融合和误差配准。
1 ADS-B 关键技术及数据预处理
1.1 ADS-B 关键技术
根据DO—242《ADS-B 最低航空系统性能标准》中的最新规定,目前,ADS-B 在民航数据中心主要包含3个方面的信息需求:
(1)导航完好性:利用监视设备能监视区域的数据报告来判断当前所在容量区域是否达到接收信号的水平。利用容量半径与导航系统所在精度等级下给出的位置信息之间存在的线性关系,确定两者之间的偏差。
(2)位置导航不确定:是一种表征水平位置数据的精度和完好性的参数。由水平品质因数和水平保护限制共同决定其能够被ADS-B 数据雷达监视服务的程度。根据DO—260A 标准规定,通常该指标在正常情况下不低于5。
(3)监视完整性等级:是指在确定导航完好性和位置导航不确定性的情况下,目标位置所在区域超出导航完好性所规定的容量半径且没有发生警告的情况下,则进行介入,完善目标监视情况[7]。
1.2 数据预处理
数据预处理通常包括3 个方面:时间配准、坐标变换以及野值剔除。其中,时间配准是将航空检测系统中不同类型及精度的雷达时间基准进行统一,其中同步天文时间的雷达属于绝对配准;而相对于各个雷达间的时间同步,保证众多传感器信息融合的同步则需要相对配准。由于各个雷达数据参照物选取的不同,数据处理前需要将检测到的属于空间极坐标系的数据变换到直角坐标系中,利用旋转变换和平移变换,统一参考坐标。在经过变换后得到的数据还需要进行野值数据剔除,雷达检测所获得的数据有可能会存在严重偏离目标值的数据,影响雷达系统坐标信息的误差估计,通常需要加入滤波算法和模型参数的最优估计算法等,来补偿雷达方位角误差。
2 雷达预处理技术
雷达系统主要由机载应答机和地面询问机组成。雷达系统通过扇形扫描飞行目标的询问与询问应答信号来确定飞行目标的空间三维位置信息并进行数据通信。雷达系统在运行前,需要对地面询问机进行校时操作,确定目标系统的实际运行时间,并在该时间基础上进行细分内部计时。通过细分计时可以确定雷达受时模块与地面询问机间的通信脉冲频率,完成通信前校准,如图1 所示。

图1 雷达系统与地面询问机时间校对
在校对时间之后,还需要对接收到的多雷达方位信息进行联合数据关联。首先,有效测量多个雷达检测目标的有效方位信息,并送到数据融合控制中心;其次,划定统一的坐标系和相应各雷达坐标的变换关系矩阵;最后,通过多雷达数据的联合算法,得到融合后的航迹滤波结果,并以状态矩阵和协方差的形式进行表示。
3 自适应交互式多模型滤波方法
卡尔曼滤波算法适用于具体运动状态的单个运动模型,然而飞机的运动状态受环境和空间影响相对复杂,采用卡尔曼滤波算法来对目标航迹进行滤波,不能满足实际航迹规划的应用需求。交互式多模型(Interacting Multiple Model,IMM)是一种能够计算多种目标运动状态,并为对应状态建立相应运动的模型。当目标在运动过程中发生运动状态的切换时,可利用马尔可夫链进行数学上运动模型的转换,并对转换过程中的模型进行滤波和加权融合。由于目标运动情况的复杂多变,模型之间的转移没有确定的形式,因此单一的状态转移矩阵进行输入交互难以达到最优的滤波效果,需要对状态转移矩阵进行自适应修正,得到需要的航迹估计如图2 所示。

图2 多雷达坐标与ADS-B 联合观测模型
对于IMM 算法,利用滤波过程中的滤波残差和残差协方差可以确定表征滤波效果的似然函数,其值越大,匹配目标运动状态的的程度越高,下一次状态转移过程中,其他模型向该模型转移的概率增大,进而通过加强匹配模型的作用,降低不匹配模型的影响,使得自适应修正后的状态转移矩阵更加符合目标真实运动情况。自适应IMM 算法流程如图3 所示。

图3 自适应IMM 算法流程图


其中:dj(k)=V(k)-C(k)Xj(k|k-1)为滤波残差,Dj(k)为残差协方差矩阵。
相邻时刻似然函数的变化反映模型j 与目标运动状态匹配程度的变化,可以用来修正状态转移矩阵。定义修正因子为:

根据上述过程即可得到优化的状态估计值和估计误差,完成本航迹点的滤波估计。
4 软件仿真
采用MATLAB 分别对ADS-B 目标真实位置信息与采用交互式自适应滤波后得到的交互式自适应雷达滤波信息进行仿真验证,如图4 所示。
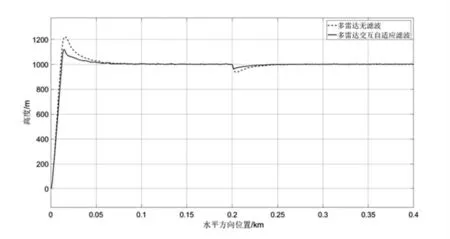
图4 目标轨迹与雷达滤波轨迹对比
初始马尔可夫状态转移矩阵设置为[0.9,0.1;0.1,0.9]时,从0 位置开始,目标向高度1 000 m 行进,水平方向位置逐渐增加;同时,在水平方向位置为0.2 km 的位置,监测雷达进行切换,由图4 可以看出,实线是采用基于IMM 算法对目标航迹进行滤波,相比于未进行交互自适应滤波的雷达信号要更接近于高度1 000 m 的位置,其偏差要小于未进行交互自适应滤波算法,更好地监测和跟踪目标位置。
表1 和表2 给出了IMM 算法和Kalman 算法下的多雷达系统误差估计结果和观测配准均方根误差,可以看出采用IMM 算法得到补偿后的多雷达观测误差要小于未补偿的雷达观测误差。当联合多雷达的ADS-B 在采样时刻得到的数据不精确时,IMM 算法能够有效估计雷达系统误差。

表1 多雷达系统误差估计结果
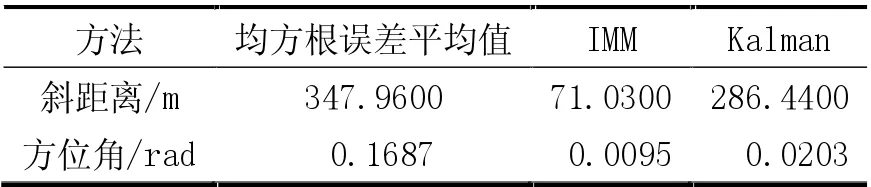
表2 多雷达观测配准均方根误差
5 结束语
本文首先介绍了ADS-B 系统与多雷达预处理的关键技术,针对单一滤波算法以及应用多雷达组网监视系统的数据融合误差问题,提出了交互式多模型算法,通过仿真对状态转移矩阵的自适应滤波修正,仿真结果表明所提算法比传统滤波算法的滤波精度更高,航迹信息更准确。
