基于虚拟阻抗和模糊PID的微电网下垂控制策略*
2022-03-23王福忠李润宇
王福忠, 李润宇, 张 丽
(河南理工大学 电气工程与自动化学院,河南 焦作 454000)
0 引 言
近年来,由于光伏、风电、储能系统和燃料电池等分布式电源的快速发展,微电网的控制研究也在不断进行[1,2]。在各等级微电网中,低压微电网更趋向于用户侧,规模小,且多为电力或能源用户使用。作为主要控制方式的下垂控制可以更好地去协调微网中各微源的功率输出,且不依赖通信以及“即插即用”的特点[3~5]。在低压微电网中线路阻抗主要呈阻性[6],通常P-V/Q-f下垂控制更加适用于低压微电网[7,8]。但在低压微电网中,由于线路阻抗中依然存在感性成分以及线路阻抗的不同[9],会出现功率耦合的问题。当负荷产生波动时,P-V/Q-f下垂控制并不能进行功率的合理分配,系统的频率和电压也会受到影响,无法保证系统的整体稳定性。
文献[10]提出了一种基于虚拟阻抗的改进下垂控制策略,旨在低压微电网中引入虚拟阻抗,线路阻抗中的阻性部分发生改变,从而削弱了功率耦合以及达到无功精确分配和抑制无功环流的目的。但均需要加入很大的虚拟电感来使逆变器的输出阻抗改变,因低压微电网呈阻性较多,不如构造其本身的输出阻抗,这样更易控制。文献[11]引入动态虚拟阻抗,使得低压微电网下可呈现阻性,从而进行合理功率分配。但未考虑在系统产生波动时的影响,且由于下垂系数固定,很难良好地进行调节。文献[12]提出了一种粒子群算法改进下垂系数的方法,通过改善控制参数来合理分配负荷功率,实现无差控制来保证系统的稳定。文献[13]中将连接线路的阻抗角作为一个变量引入到下垂控制中, 并添加了一个微分控制环节,从而减小系统在暂态过程中的振荡。但只考虑了功率的稳定性输出问题,并未考虑到系统电压和频率。
对于上述问题,本文提出了基于虚拟阻抗的低压微电网下垂控制策略,在P-V/Q-f下垂控制上引入虚拟阻抗,使系统的阻感比发生改变,使得低压微电网呈现阻性,更好地解决功率耦合的问题。在此基础上,又引入模糊比例—积分—微分(proportional integral differential,PID)控制器,来解决引入虚拟阻抗后以及负荷波动时,功率分配以及电压和频率产生波动的问题,使得P-V/Q-f下垂控制可更好适用于低压微电网。最后通过仿真验证此策略的合理性与有效性。
1 P-V/Q-f下垂控制
当逆变器工作在低电压系统环境下,这时的线路阻抗特性多呈现为阻性,线路中的阻抗比为7.7[14],并且功率角θiL也非常小,故当线路电感X忽略不计时,由此推导出的P-V/Q-f下垂控制的方程式为
(1)

但实际低压微电网中虽然线路阻抗以阻性为主,由于不同逆变器上的线路阻抗不同,会出现功率耦合问题,所以依然不能忽略感性成分。从式(1)可以看出,P-V/Q-f下垂控制是在忽略感性的情况下得到的,所以,需要将系统的总阻抗设计为纯阻性。故需引入虚拟阻抗来满足式(1)条件,且由于下垂系数固定,在引入虚拟阻抗后,P-V/Q-f也并不能良好控制系统的功率分配以及电压和频率。
2 低压微电网下垂控制策略
对于上述问题,本文提出低压微电网下垂控制策略,总框图如图1所示。在引入虚拟阻抗解决系统阻感性的基础上,加入模糊PID控制器[15,16],代替原本的固定下垂系数,使得整个下垂控制可以进行自适应调节。

图1 低压微电网下垂控制的总框图
2.1 虚拟阻抗的引入


图2 引入虚拟阻抗后的电压电流双环控制框图
在引入虚拟阻抗后,系统的等效阻抗[17]为
(2)


图3 输出阻抗矢量图
从图3中可以看出系统的输出阻抗,在加入虚拟阻抗后,基本上呈纯阻性,此时逆变器的功率可进行良好的解耦,P-V/Q-f下垂控制能够适用于低压微电网。
2.2 自适应模糊PID控制
在P-V/Q-f下垂控制方程式(1)的基础上加入积分和微分环节,构成改进下垂控制方程为
(3)
式中mPi和nPi在稳态负荷中起核心作用,加快响应速度,提高系统调节精度;mIi和nIi起到消除稳态误差的作用;mDi和nDi用来调节系统的动态性能。
但由于传统的PID参数值也是固定的,当负荷多次变化时,可能无法对下垂控制进行精确地调节。故本文在传统PID的基础上加入模糊算法,使得PID参数可根据负荷变化实时进行在线调节下垂系数,构成自适应下垂系数。
对于模糊PID控制器的设计分为以下步骤:
1)模糊变量与隶属度函数
模糊PID控制器将ep(t),ecp(t),eQ(t)和ecQ(t)作为输入量,输出量为KP,KI,KD。输入、输出量在模糊集上的论域和模糊子集[15]分别表示为
论域:输入量和输出量=[-3,-2,-1,0,1,2,3]
模糊子集:{NB,NM,NS,ZO,PS,PM,PB}
具体控制器参数设定为:输入量ep(t)和ecp(t)的基本论域均为[-2 000,2 000],量化因子为1.5×10-3;eQ(t),ecQ(t)的基本论域均为[-3,3],量化因子为1。输出量KP,KI,KD的基本论域分别为[-3×10-4,3×10-4],[-3×10-3,3×10-3],[-6×10-7,6×10-7]量化因子为104,103,5×106。控制器输入量和输出量的隶属度函数如图4所示。

图4 输入和输出的隶属度函数
2)制定模糊规则
通过专家知识以及经验法,采用“If e(t) is A and ec(t) is B thenKPiis C”的控制规则语句,KIi,KDi同理。通过仿真得到图5所示的KPi,KIi,KDi的具体变化情况以及表1所示的模糊控制规则。

图5 KPi,KIi,KDi观测曲面

表1 模糊控制规则
3 仿真验证与分析
本文将通过MATLAB/Simulink仿真去建立仿真模型。分别搭建P-V/Q-f下垂控制仿真和本文所提出的下垂控制策略仿真,考虑在负荷波动/投切时的情况下,对系统功率均分以及电压和频率变化进行对比并分析,验证低压微电网下垂控制策略的优势和有效性。
此次仿真将采用两个微源DG1和DG2作为并联运行,由于此次仿真重点在于对逆变器的控制,故微源采用直流电源等效模型,且两台逆变器的容量相同。同时系统接入两个可变负荷Load1和Load2。具体仿真参数:直流电源Vdc为800 V,滤波器电容C为1 500 μF,滤波器电感L为0.6 mH,额定有功功率Pn为20 kW,额定无功功率Qn为0 kW,虚拟阻抗Rv-jLv为(1.114 5-j0.004 85)Ω,DG1线路阻抗Z1为(0.2+j0.002 6)Ω,DG2线路阻抗Z2为(0.9+j0.117)Ω,负荷Load1为(5+j3)kW,负荷Load2为(4+j2)kW。
仿真设定:在初始时,DG1和DG2以及Load1最初投入运行,在0.3 s时Load2投入运行,0.6 s时Load1退出运行。
从图6中可以看出,在P-V/Q-f下垂控制策略下,DG1和DG2的无功功率在0.6 s时Load1退出时有明显突然波动,但基本达到合理分配,而有功功率没有实现合理分配,DG1和DG2均出现了输出偏差,这是由于线路阻抗不相同的影响。
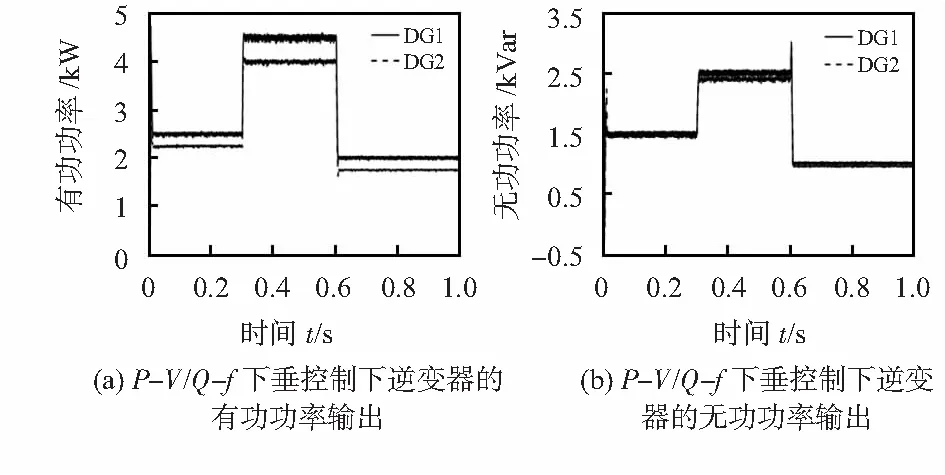
图6 P-V/Q-f下垂控制的仿真波形
在采用本文所提出的下垂控制策略后,从图7中可以看出,在虚拟阻抗和模糊PID的作用下DG1,DG2的有功功率各输出4 500 W,无功功率各输出2 500 Var,均达到了合理均分的目的。

图7 本文所提下垂控制仿真波形
图8将三种不同控制下的电压进行对比,可以看出,在图8(a)中系统的母线电压因受到负荷投切/波动的影响,电压在0.3 s时出现下降至375 V,稳定后一直保持,并没有恢复至380 V,在0.6 s时,由于负荷切出,产生短暂的升高。图8(b)中,加入PID控制后,系统电压在0.3 s时,并没受到负荷投入的影响,系统电压保持在380 V,但在0.6 s还是受到了负荷切出的影响,未能良好的调节。图8(c)中为本文所提下垂控制,能够良好且快速地调节电压,使得系统电压几乎不受负荷投切的影响,始终保持在380 V。
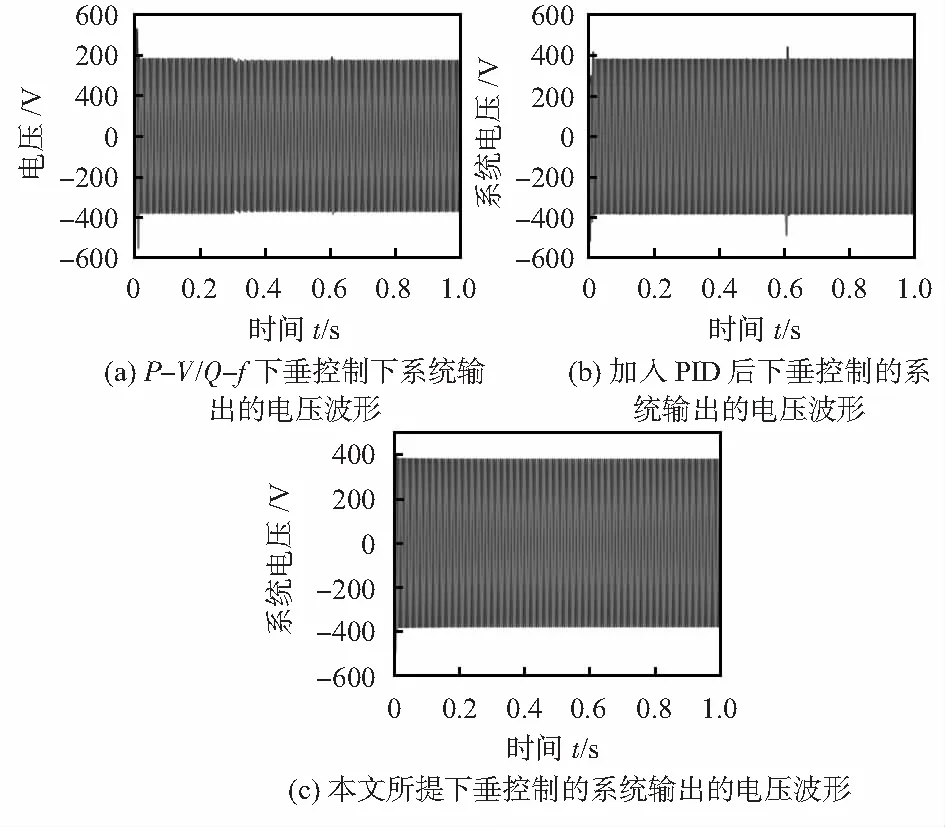
图8 三种控制下的系统电压对比
图9将三种下垂控制方式下的频率进行对比,可以看出,传统的下垂控制在0.3 s时,由于负荷投入,频率出现下降,降到49.97 Hz,并稳定在49.99 Hz,没有恢复到工频,在0.6 s负荷切出后,频率出现上升达到50.012 Hz,并稳定在50.01 Hz,也没有在恢复至工频。

图9 三种控制方式下的系统频率对比
而在引入PID控制后,频率在0.3 s时,下降到了49.985 Hz,在经过0.1 s后,恢复至工频,在0.6 s时,频率再次上升至50.01 Hz,在经过0.1s后,恢复至工频,从分析来看,加入PID控制后,频率的波动比传统下垂控制要小,并能够恢复至工频,但由于PID调节参数固定,所以,频率还是会因负荷的投切产生波动,且恢复至工频时间较慢。
在本文所提方法下,由于下垂系数自适应调节,故系统频率几乎不受负荷波动/投切的影响,且始终保持在工频50 Hz左右,从而保证整个系统可以更加稳定的运行。
4 结 论
P-V/Q-f下垂控制在低压微电网中受线路阻抗和负荷波动的影响,从而无法良好地进行控制。对此,本文提出了基于虚拟阻抗的低压微电网下垂控制策略,通过引入虚拟阻抗,来解决系统中出现的功率耦合问题以及改变线路阻抗,使得P-V/Q-f下垂控制更好地适用于低压微电网。同时,在P-V/Q-f下垂控制的基础上引入模糊PID,能够自适应调节下垂系数。通过仿真对三种控制方式进行比较,证明了基于虚拟阻抗和模糊PID的微电网下垂控制策略可以有效地应用于独立低压微电网,提高系统中有功功率和无功功率的分配精度,并且在系统出现扰动时,很好地抑制电压和频率的波动,整体提高了系统的运行稳定性。
