多节连续体机械臂的预紧机构装置设计
2022-03-22郭新兰姚利娜
郭新兰,姚利娜
(1.南京交通职业技术学院轨道交通学院,江苏 南京 211188;2.郑州大学电气工程学院,河南 郑州 450001)
近年来,柔索驱动连续体机械臂因其灵活的结构和在非结构化工作空间中工作的能力而受到广泛关注,在微创手术、紧急救援和水果采摘等领域得到广泛应用[1-4]。与其他现有类型的连续体机械臂(杆驱动或流体驱动)相比,柔索驱动的连续体机械臂更精确,可以提供更高的有效载荷能力。然而,柔索驱动连续体机械臂在运动过程中可能出现绳索松弛情况[5],这种松弛的绳索对动作的准确性和载荷的可操作性造成了不利的影响。
在连续体机械臂的柔索张力方面,Suh 等[6]提出了无滑轮滚动接头,以保持柔索张力恒定,防止任何可能的脱轨和绳索松弛。Asano等[7]提出了一个沿绳索连接的张力传感器,能够将张力水平反馈给控制器,使电机保持所需的张力。此外,Li 等[8]提出了基于张力传感器反馈的PID 张力控制,属于目前较为流行的主动柔索张力控制方法。然而,这些方法只分析了单根绳索的情况,而柔索驱动机械臂需要同时维护多根绳索的张力。此外,上述方法需要更大的空间,这将导致机械臂的尺寸增大。
在连续体机械臂的载荷能力方面,Gao 等[9]对单节连续体机械臂的载荷能力进行分析,提出了机械臂在末端受载时的姿态预测数学模型。此外,Merodio 等[10]提出了基于大挠度理论的连续体机械臂运动学模型。这些研究都一致强调,连续体机械臂的有效载荷能力会随着机械臂刚度的增加和驱动截面数量的增加而增加。在连续体机械臂的控制方面,Ataollahi等[11]使用光学传感器预测机械臂形状,Tang 等[12]提出在每个关节中使用了编码器来预测机械臂形状。但是,上述方法不仅价格昂贵,而且增加了连续体机械臂移动部件的质量。
本研究设计了一种用于柔索驱动连续体机械臂的新型混合式预紧机构,其创新之处在于结构紧凑、成本低,可同时保持多根柔索张力。试验结果显示,该装置不仅可以避免绳索松弛,还有助于改善机械臂在外部载荷作用下的运动轨迹。
1 柔索驱动连续体机械臂
多节柔索驱动超冗余连续机械臂由3 个主要部件组成:连续体部件、预紧部件和驱动部件,其CAD设计图如图1所示。

图1 机械臂CAD设计Fig.1 CAD design of mechanical arm
1.1 连续体部件
连续体部件由2 个部分组成,每个部分包含5个分段。每段长度为40 mm,由通过万向节互连的2 个布线间隔盘组成。万向节由直径为3 mm 的直线轴连接,直线轴穿过安装在间隔盘中心的直线轴承。绳索穿过布线间隔盘[13]的小孔,并在弹簧内对齐,分段的结构如图2所示。
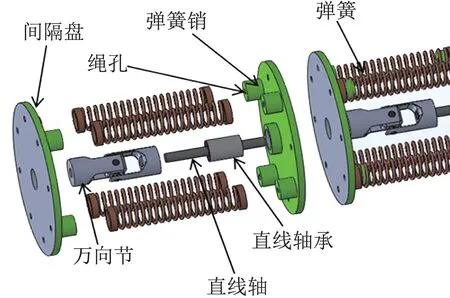
图2 分段的结构Fig.2 Structure of subsection
1.2 混合式预紧机构设计
预紧机构位于机械臂的中部,驱动绳索穿过预紧机构装置。在连续体机械臂中,总共4 个电机驱动,8 根绳索。不同于传统的被动式预紧机构的设计,本研究采用了线性电位器来获得柔索张力反馈,线性电位器比线性编码器价格便宜得多。此外,该装置安装在机械臂的固定部分,而不是移动连续体部分。因此,它将有助于机械臂在恶劣环境中的使用。混合式预紧机构设计如图3所示。
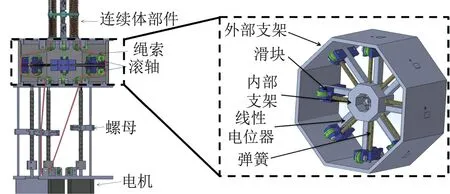
图3 混合式预紧机构设计Fig.3 Design of hybrid pretensioning mechanism
传统的预紧机构是一种完全被动[14]的机构,用于补偿运动过程中的柔索张力,但本研究所设计的混合式原型是一种被动和主动结合的机构。混合式预紧机构提供两级张力补偿:第1 级采用被动方式,压缩弹簧将布线滑块沿直线轴推动;第2 级的目的是主动保持柔索张力。附加的线性电位器将有关柔索张力的信息反馈给Arduino 开发板,Arduino 开发板向驱动电机发送命令以保持所需的张力。
1.3 驱动部件
致动部件配备了4 个步进电机,每个步进电机以拉动和释放的方式驱动2 根绳索,致动单元的工作原理如图4所示。

图4 驱动单元的工作原理Fig.4 Working principle of actuating unit
电机旋转单独的丝杠轴,丝杠螺母在直线轴的引导下沿着轴向移动。这种机械设计允许即使电机关闭也能保持张力。
2 预紧机构的末端控制方法
2.1 预紧力控制策略
连续体机械臂由8 根绳索驱动,第1 部分由电机A 和电机C 驱动,其中电机A 驱动绳索a 和绳索a^,电机C 驱动绳索c 和绳索c^;类似地,第2 部分由电机B 和电机D 驱动,其中电机B 驱动绳索b 和绳索b^,电机D驱动绳索d和绳索d^,如图5所示。
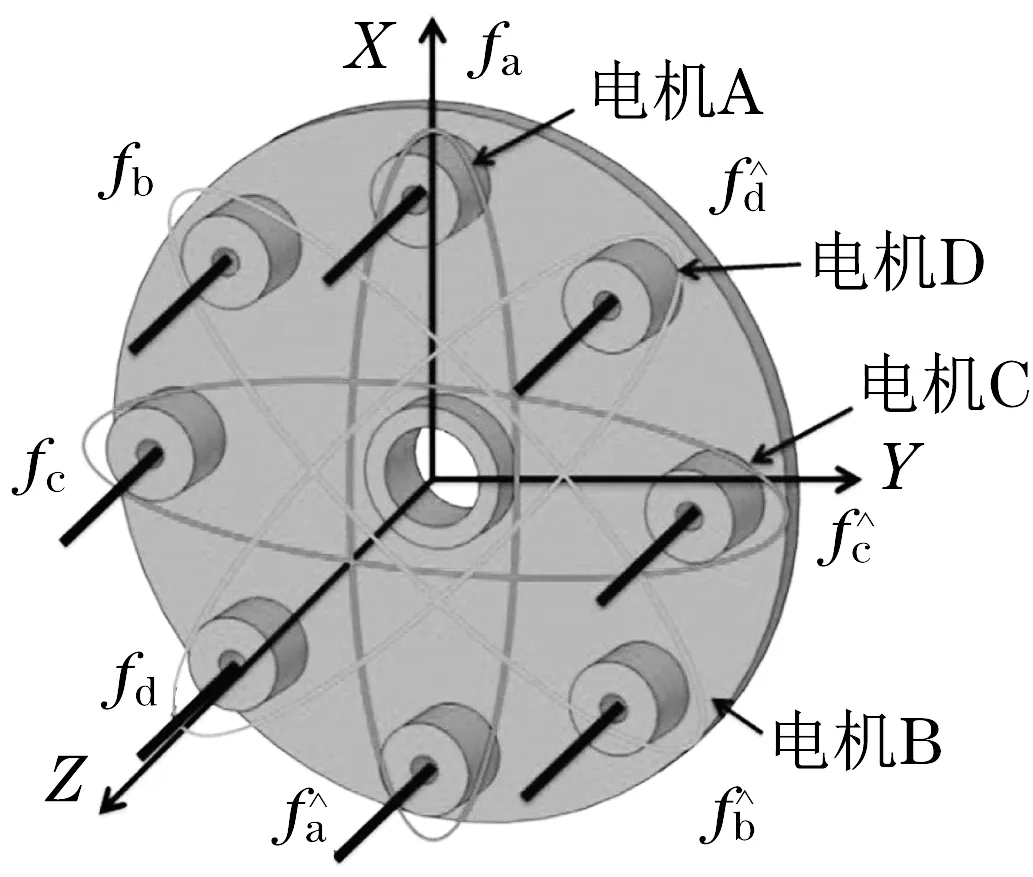
图5 电机和绳索分布Fig.5 Distribution of motors and ropes
所提控制策略的目的是同时驱动绳索,然而在多段执行时,可能会遇到线松和控制精度问题。因此,基于上述绳索分布提出了相匹配的混合式控制策略,包括了2 种方式:被动补偿和主动补偿。例如,当柔索张力因某些外部因素(机械臂在末端承受一个载荷时,该载荷将使末端向下移动)而变化时,通过改变预紧机构中弹簧的压缩长度来实现被动张力补偿。而主动张力补偿则由电机提供,以保持所需的柔索张力。
对于形状复杂的连续体机械臂,如S 型机械臂,由于滑块位移长度的限制,被动预紧方式可能无法完全处理柔索张力,这就需要借助线性电位器的反馈信息对柔索张力进行主动补偿。这种方法不仅可以保持张力水平,而且可以利用获得的张力信息提高机械臂有效载荷的可操作性。
2.2 主动补偿的公式推导
预紧机构的工作示意图如图6所示。
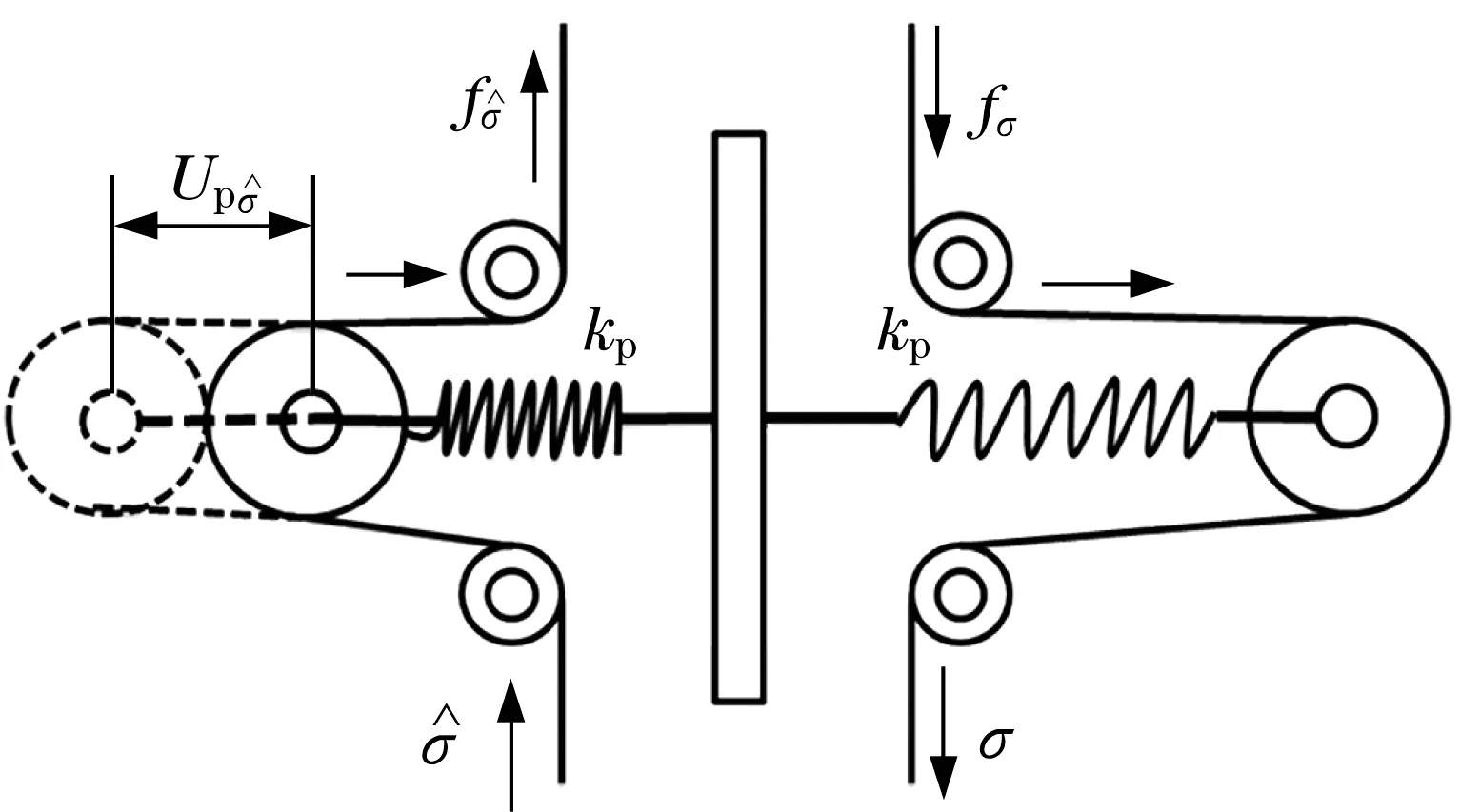
图6 预紧机构的工作示意图Fig.6 Schematic diagram of pre-tightening mechanism
预紧弹簧的受力情况如下:

式中:kp为弹簧常数;upσ、upσ^为预紧弹簧的压缩长度。
设pn=(pnx,pny,pnx)T为端点的位置矢量,θ=(θa,θb,θc,θd)T为4 个电机的旋转角度矢量,Tm=(Ta,Tb,Tc,Td)T为加载在电机轴上的扭矩矢量,则根据力学基本理论中的虚功原理可以得出

式中:ΔM为加载在末端上的扰动质量;g=(0,0,g)T为重力加速度矢量。
如果采用雅可比矩阵规定端点的无穷小位移和电机的无穷小旋转[15],则式(3)可变为

式中:I=∂pn/∂θ为雅可比矩阵。

电机轴上载荷的扭矩与柔索张力有关,如

式中:λ为螺纹导程。
将式(1)和式(2)代入式(6),得到

因此式(5)中的Tm为
其中,

将式(8)代入式(5)可得

由 于g=(0,0,g)T且I=∂pn/∂θ,则 式(10)可写为
可以推导出

式中:Δuσ=(uσ-uσ^)。
如果事先知道末端加载的扰动质量ΔM,则式(12)将改写为

由式(13)可知,如果在末端处加载ΔM所产生的预紧弹簧的压缩/拉伸Δuσ较小,则可估计雅可比矩阵相应的偏微分项。因此,主动补偿的电机角度为

式中:Δpnz为末端沿z轴的位移。
3 试验结果与分析
3.1 试验设置
为了验证所提混合式预紧机构及其控制方法的有效性,进行了2 种类型的试验。制备的混合式预紧机构原型如图7所示,试验设置如图8所示。

图7 制备的混合式预紧机构原型Fig.7 Prototype of hybrid pre-tightening mechanism manufactured
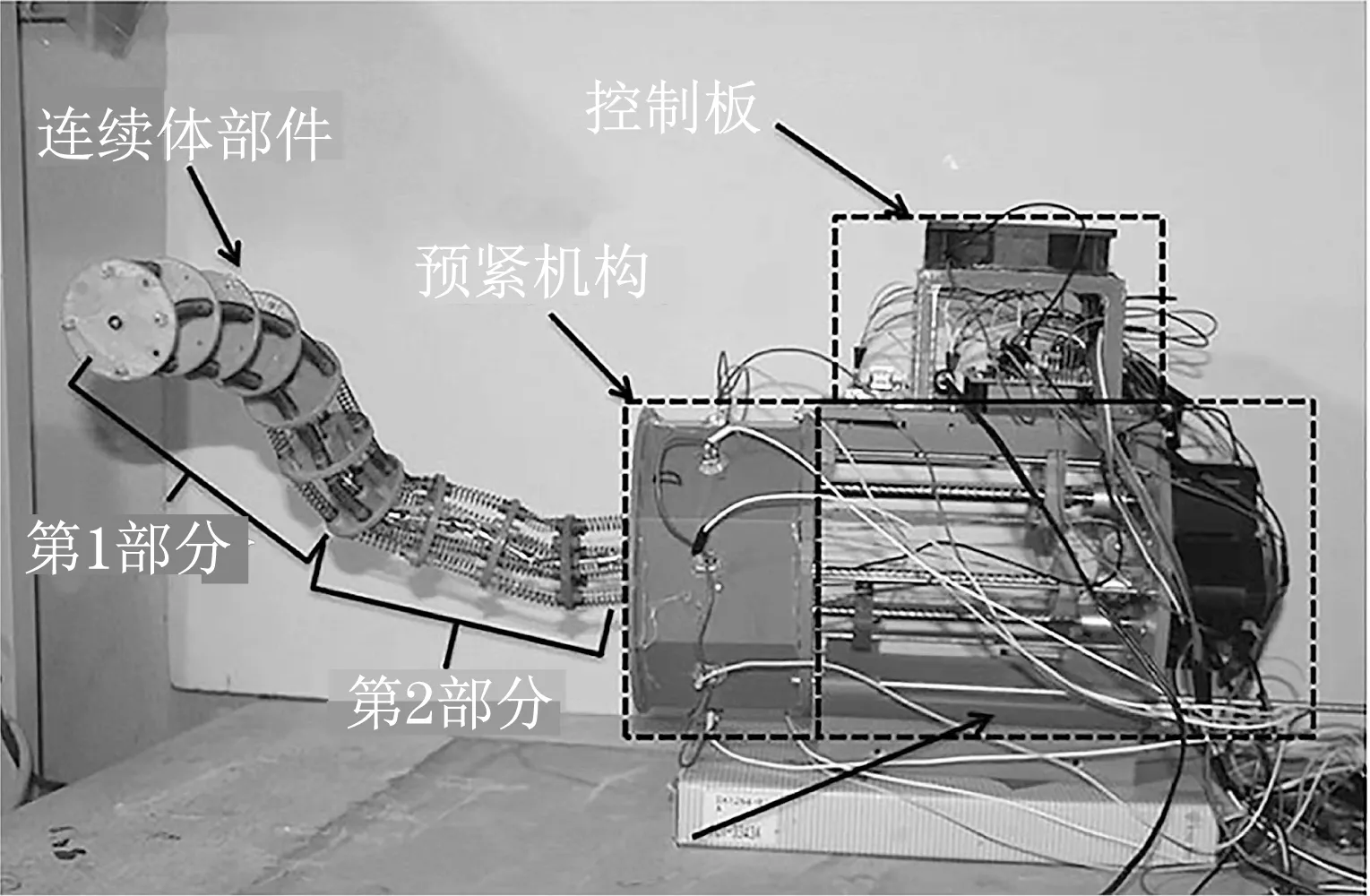
图8 连续体机械臂试验设置Fig.8 Test setup of continuum manipulator
3.2 有效载荷试验
该试验的主要目的是验证所提预紧机构的有效载荷能力。在这个实验中,控制器为机械臂指定了一个特殊的任务,且仅使用被动柔索张力补偿。机械臂应将安装在末端的载荷提升到尽可能高的高度,电机只在垂直方向上驱动机械臂的方向。当载荷为130 g时,有、无预紧力机构的机械臂举重对比如图9所示。

图9 机械臂举重对比Fig.9 Comparison of mechanical arm weightlifting
从图9 可见,使用预紧机构有效增加了机械臂的有效载荷能力,最大高度增加了约200 mm。多次试验表明:有预紧机构的机械臂可以处理多达220 g,而没有预紧机构的机械臂只能处理最多200 g。
175 g 载荷条件时2 种情况下末端的轨迹运动跟踪如图10所示。
从图10 可见,在使用预紧机构的情况下,末端平滑地沿着一条直线倾斜移动,而无预紧机构的运动轨迹抖动明显。图10 中的间隙描述了运动的不连贯,这是由绳索松弛引起的显著抖动所致。因此,有预紧机构的机械臂运动轨迹更平滑,提高了末端位置控制的精度。
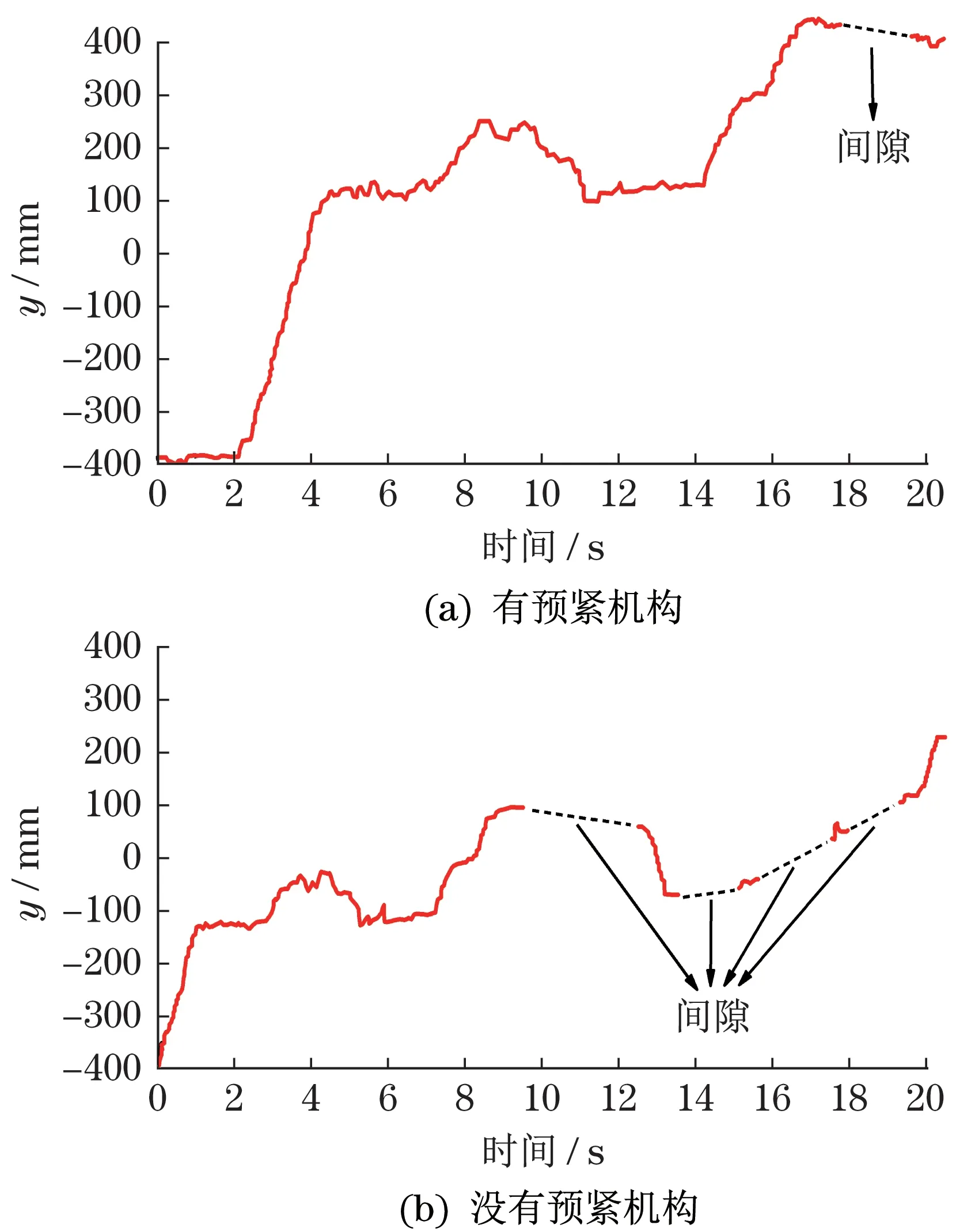
图10 175 g载荷条件时两种情况下末端的轨迹运动跟踪Fig.10 Trajectory motion tracking of the end in two cases under the load condition of 175 g
3.3 载荷可操作性试验
该试验的目的是验证柔索张力主动补偿有效性。为了评估主动柔索张力补偿,开发了一项实验任务,即连续体部件水平地从左(A点)向右(B点)移动。在这种情况下,电机应该补偿末端的运动以实现水平移动。测试了3种载荷条件:空载、50 g和100 g。50 g载荷可操作性试验装置如图11所示。
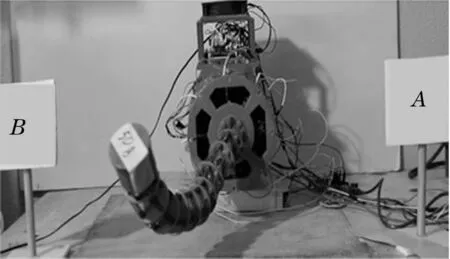
图11 50 g载荷可操作性试验装置Fig.11 50 g load operability test device
有、无使用主动补偿的区别如图12所示。
从图12 可见,在空载的情况下,两者之间的区别不大。而在100 g 载荷较重的情况下,使用主动补偿的机械臂变得更加灵敏,载荷可操作性明显提升。曲线图出现的波动是由于绳索和间隔盘小孔之间的摩擦造成的。
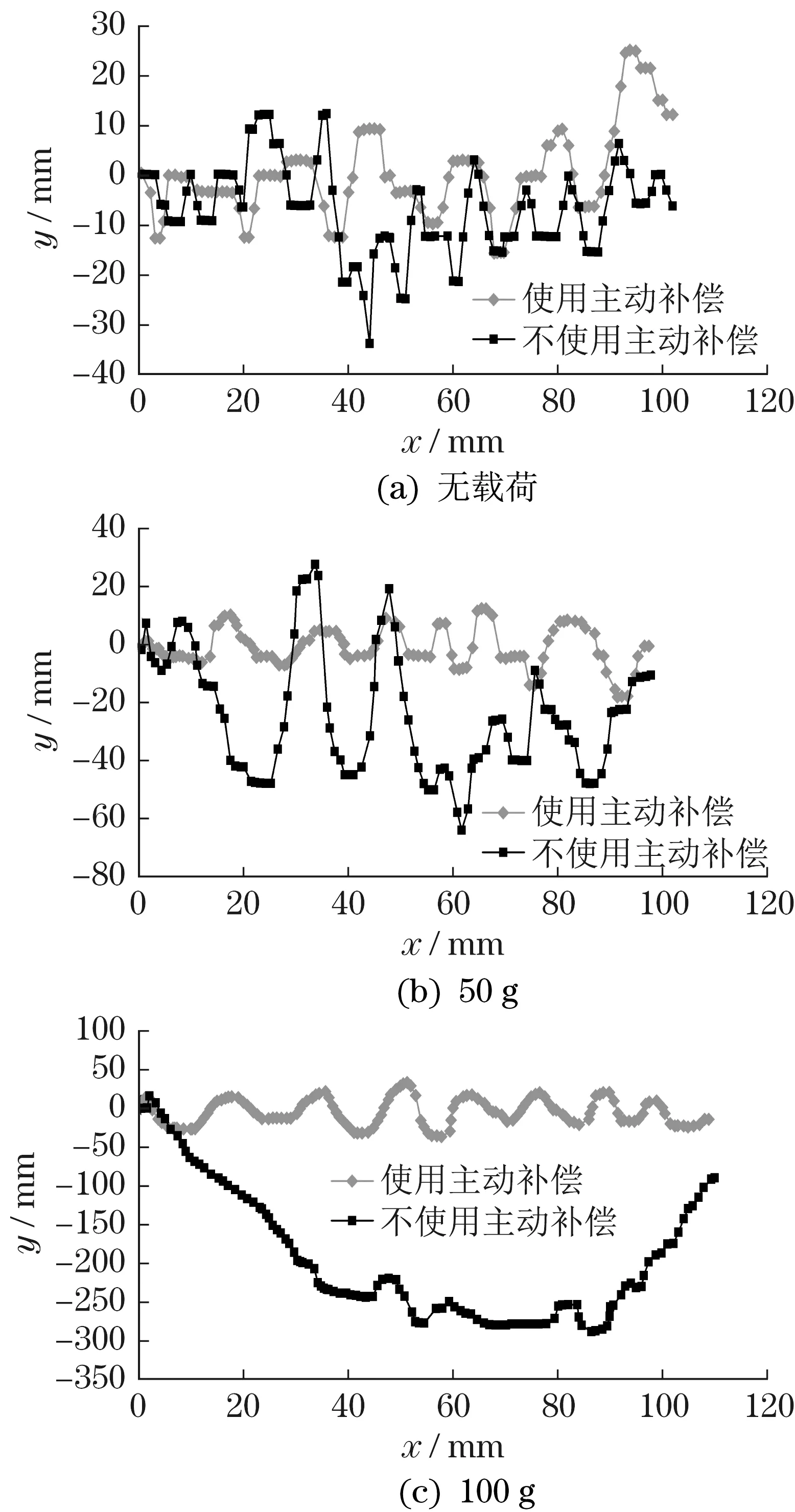
图12 有、无使用主动补偿的区别Fig.12 Difference between using active compensation and not using active compensation
4 结论
本文设计了一种用于柔索驱动连续体机械臂的新型混合式预紧机构装置,并提出了一种防止绳索松弛的新方法;给出了该装置的详细硬件设计方案、预紧力控制策略及其推导过程,并通过试验进行了测试验证。本文得出如下结论:①有预紧机构机械臂的有效载荷能力和末端位置控制精度均得到有效提高,防止了绳索松弛的发生;②通过使用所提出的混合式预紧力控制策略,有效提高了机械臂的载荷可操作性。后续将尝试使用机器学习技术来快速控制机械臂的形状。
