半主动型电磁动力吸振器及其周铣制振的应用研究
2022-03-22李浩田王海芳李凌轩
李浩田,王海芳,李凌轩
(东北大学秦皇岛分校控制工程学院,河北 秦皇岛 066004)
在周铣加工中,刀具的振动会增大零件的误差,降低表面质量、零件的使用性能和企业的经济效益,严重时甚至会损坏加工设备。因此,周铣加工中振动的控制有着重要的现实意义。
目前,国内外对铣削加工中的减振研究主要集中在探究铣床主轴系统的动力学特性,采用控制切削速度、背吃刀量、进给速度等加工参数的方法减小铣削加工中的振动或避免切削颤振。Tobias[1]研究了不同机床在加工中的振动模式和影响;Altintas[2]研究了不同机床加工中切削力和加工参数的数值关系;汪博等[3-4]、唐委笑等[5]、Ahmadi等[6]研究了机床加工中的稳定性;Tlusty[7]讨论了主轴配有长端铣刀的常规模态;廖伯瑜等[8]研究了各机床的模态仿真,可以有效减少切削颤振,但使生产效率降低。
动力吸振器作为一种常见的减振手段,广泛应用于工程实践中,其与主系统通过弹簧元件连接,将主系统振动的能量转移给自身,降低主系统的振幅。背户一登等[9]研究了动力吸振器参数的优化方法。但是机床结构的特殊性和主轴转速的变化限制了动力吸振器在周铣加工中的应用。动力吸振器分为3 类:被动型动力吸振器、主动型动力吸振器、半主动型动力吸振器。所有的动力吸振器,只有在自身固有频率等于主系统工作频率时才有很好的制振效果。被动型动力吸振器,如张震坤等[10]研究的鼠笼式调谐质量阻尼器和卢琪等[11]研究的阻尼式动力吸振器,虽然结构简单,能应用的场合多,但是无法改变自身的固有频率,无法应用在周铣加工的制振中;主动型动力吸振器种类很多,如邢健等[12]研究的磁流变液阻尼器、翁光远等[13]研究的记忆合金阻尼器、胡俊峰等[14]研究的压电陶瓷吸振器,可以调节自身刚度改变自身的固有频率,这类吸振器结构复杂,同样无法应用在周铣加工的制振中;半主动型动力吸振器具有改变自身固有频率的能力并且结构简单,能同时适应机床结构的特殊性和主轴转速的变化。根据吴文江等[15]、姚红良等[16-17]、张晓平等[18-19]的研究,磁体之间经过合适的配置可以形成可调刚度。
以上研究表明了实现应用于周铣加工的制振中的半主动型动力吸振器的可行性,可以解决目前用控制加工参数降低切削振动导致的生产效率降低的问题。本文提出了一种具体的半主动型电磁动力吸振器结构,将其应用于周铣加工中机床主轴系统的减振,通过数值仿真探究了其减振性能。
1 半主动型电磁动力吸振器结构及原理
动力吸振器结构如图1 所示。图中可见,动力吸振器有2 个电磁铁由杆组连接,图中左侧连接机床床身的电磁铁1 和右侧可以产生振动的电磁铁2,杆组由6 个直径一样且均布的杆组成。电磁铁2和内环2 之间有着径向的间隙,内环2 内接大刚度轴承,轴承内接刀柄。电磁铁1 和2 内外圈都缠绕线圈且内外圈导线通电方向相反,2 个电磁铁通电情况相同,此时2 个电磁铁相当于2 个异极靠近的环形磁铁。当电磁铁2 产生挠度时,2 个磁铁不再同心,此时2 个磁铁之间的吸力在此挠度方向上的分力不再为0。结合6 个杆组的刚度,动力吸振器和机床床身之间就会产生可用电流调节的刚度。电磁铁2 右侧有环形凸起,可以加装环形质量块以调节质量。
2 系统的振动模型与运动方程
2.1 振动模型与运动方程的插值
对系统进行简化和有限元划分,结果如图2 所示。①~○1为单元编号,各单元对应的内径为ri,外径为Ri,①~⑤为主轴的单位,⑥~⑨为刀柄的单元,⑩~○1为刀具的单位;1~36 为点编号,各点对应的位置为xi,f为动力吸振器对刀柄的力,F为切削力,kωi为平动刚度,kθi为转动刚度,cωi为平动阻尼,cθi为转动阻尼。单元尺寸如表1所示。
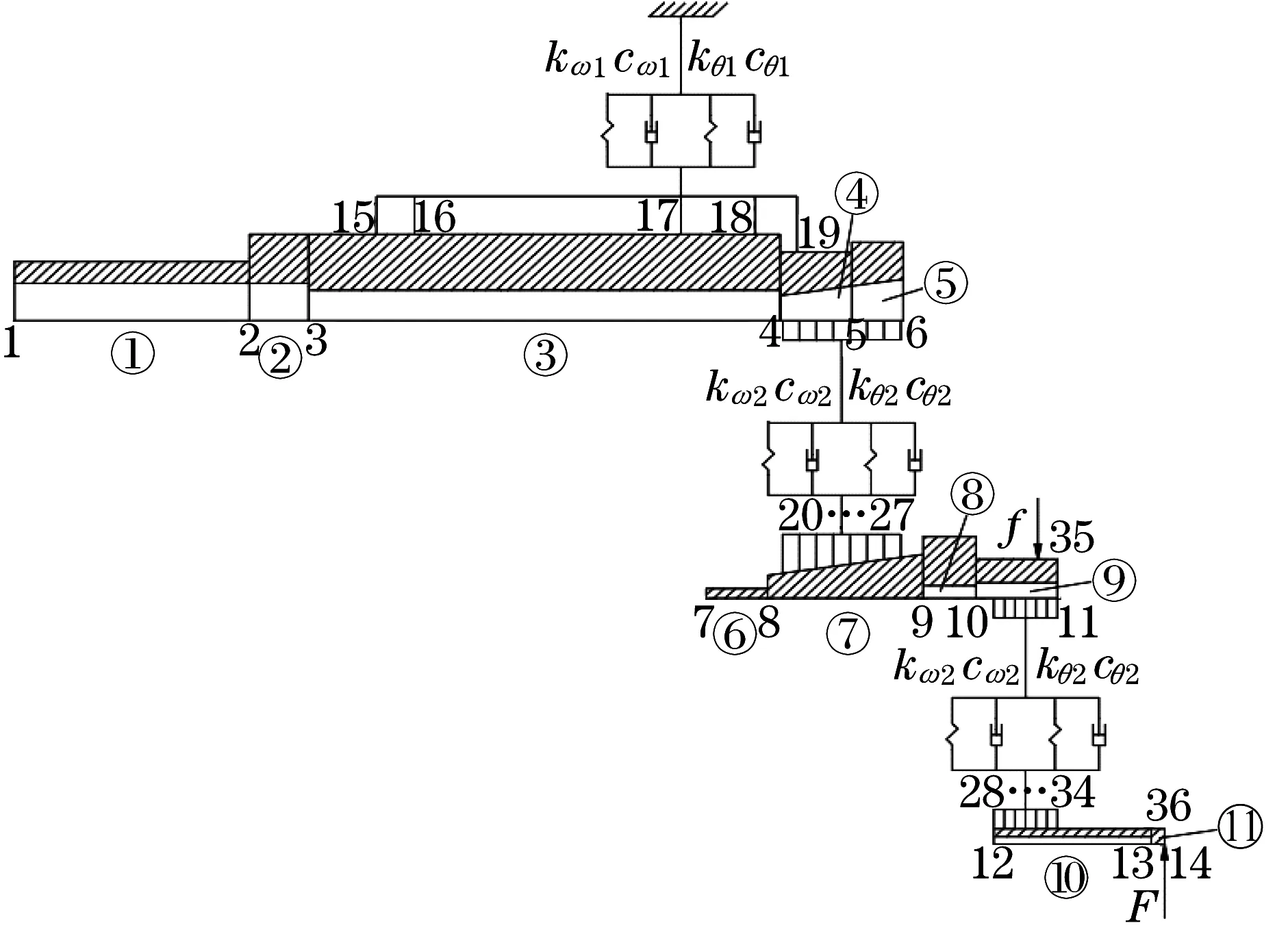
图2 系统有限元模型Fig.2 Finite element model of system
力作用点位置如下:x15= 171 mm,x16=189 mm,x17=315 mm,x18=350 mm,x19=370 mm,x20=363 mm,x21=371 mm,x22=379 mm,x23=387 mm,x24=395 mm,x25=403 mm,x26=411 mm,x27=419 mm,x28=463 mm,x29=468 mm,x30=473 mm,x31=478 mm,x32=483 mm,x33=488 mm,x34=493 mm,x35=484 mm,x36=544 mm。
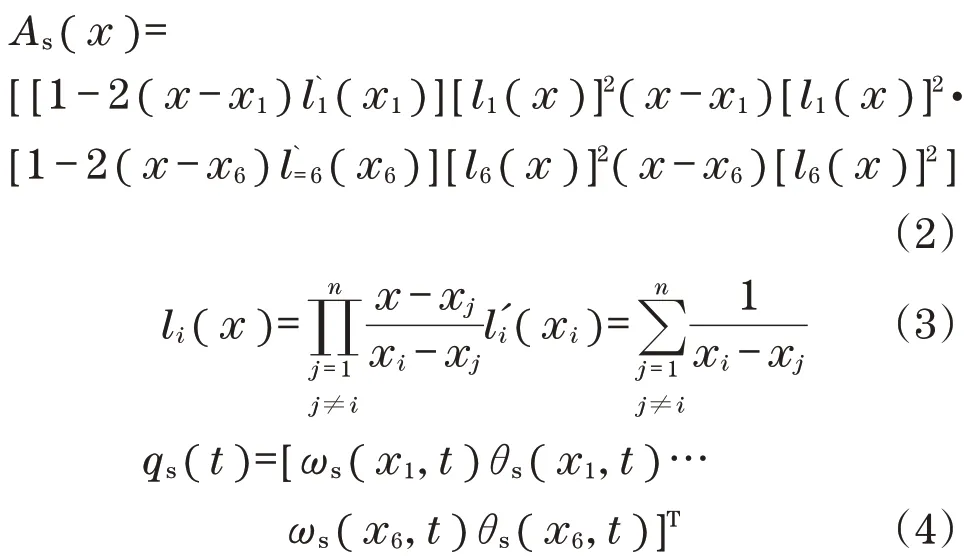
考虑进给方向,主轴、刀柄、刀具上点的挠度和转角分别为ωs、θs、ωh、θh、ωt、θt。用hermite 插值[20]逼近主轴的挠度函数,有

其中,
对刀柄、刀具分别有

2.2 主轴的运动方程
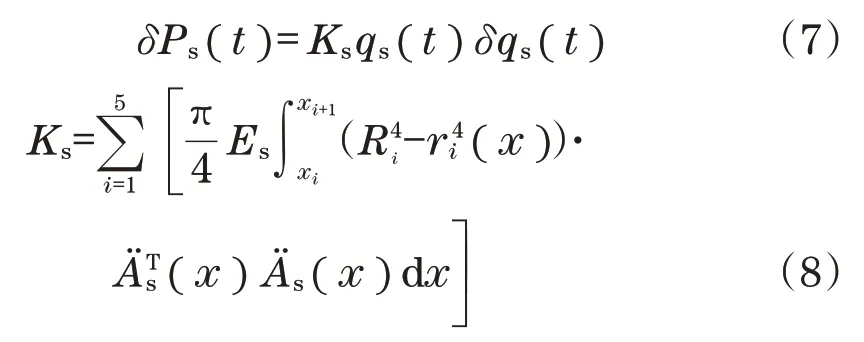
主轴的弹性模量为Es,密度为ρs,由应力、应变、挠度的关系求主轴应变能为
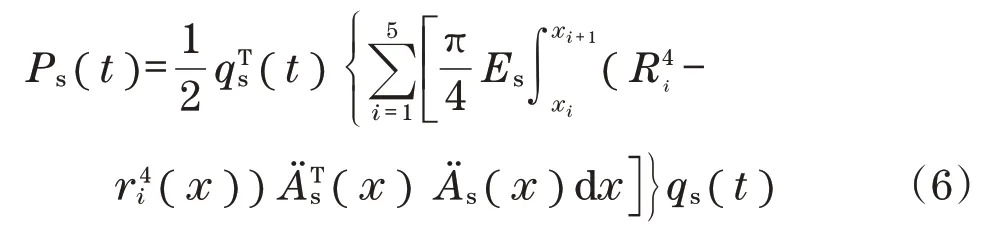
求变分:
惯性力对主轴做的虚功为

轴承对主轴做的虚功为
式中:kω1为轴承的平动刚度;cω1为平动阻尼;kθ1为弯曲刚度;cθ1为弯曲阻尼。
将主轴-刀柄的区域耦合视为8个点耦合,刀柄对主轴做的虚功为

式中:kω2为耦合的平动刚度;cω2为平动阻尼;kθ2为弯曲刚度;cθ2为弯曲阻尼。
由最小势能原理,得

则主轴运动方程为

2.3 刀柄的运动方程
刀柄弹性模量为Eh,密度为ρh,应变能变分为
惯性力对刀柄做的虚功为

动力吸振器的简化结构如图3 所示。动力吸振器对主轴的作用力f(t)的作用点位置如图2和表2所示,主轴对电磁铁2的作用力为-f(t),平行板簧的刚度为k,电磁铁2 挠度为ωe(t),平行板簧对电磁铁2的作用力为

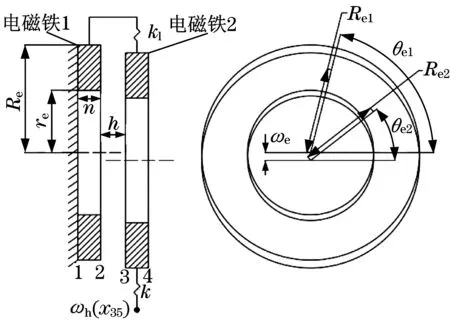
图3 动力吸振器物理模型Fig.3 Physical model of dynamic vibration absorber
杆组对电磁铁2 的力为f1(t),杆组由6 个长度为l、横截面直径为d、弹性模量为El的杆组成。设挠度正方向为上,转角正方向为逆时针,根据杆某端完全固定的边界条件和杆的挠度与杆的弯矩的关系,可得

电磁铁1对电磁铁2的力为f2(t),磁铁1和2之间距离为h,内径为re,外径为Re,厚度为n,线圈匝数为N,电磁铁2 质量为m1,磁导率为μ,线圈中电流为I,2 个电磁铁通电后表面剩余磁通密度B=μIN/n。电磁铁2 产生挠度时,面2 的微元对面3 的微元的吸力在挠度方向上的分力为

分母的ωe(t)相对h很小,忽略、整理并积分得
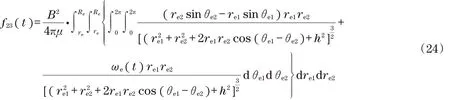
同理,分别求出挠度方向上面1 对面4 的斥力、面1 对面3 的斥力、面1 对面4 的吸力。电磁铁1 给电磁铁2在挠度方向上的分力为各面之间作用力的和:

对电磁铁2列出受力平衡方程为

动力吸振器对刀柄所做的虚功为

将主轴-刀柄的区域耦合视为8个点耦合,主轴对刀柄做的虚功为
将刀柄-刀具的区域耦合视为7个点耦合,刀具对刀柄做的虚功为
由最小势能原理,得

则刀柄运动方程为

2.4 刀具的运动方程
刀具弹性模量为Et,密度为ρt,应变能变分为
惯性力对刀具做的虚功为
切削力F(t)视为在铣刀的刀尖处,刀具受力简图如图4所示,进给方向为水平方向。刀具所受的的径向力Fr=krah,切向力Ft=ktah,其中,a为主轴方向切削宽度,h为刀具每齿进给量,kr与kt为切向与径向切削力系数。由于刀具在进给方向存在振动,有
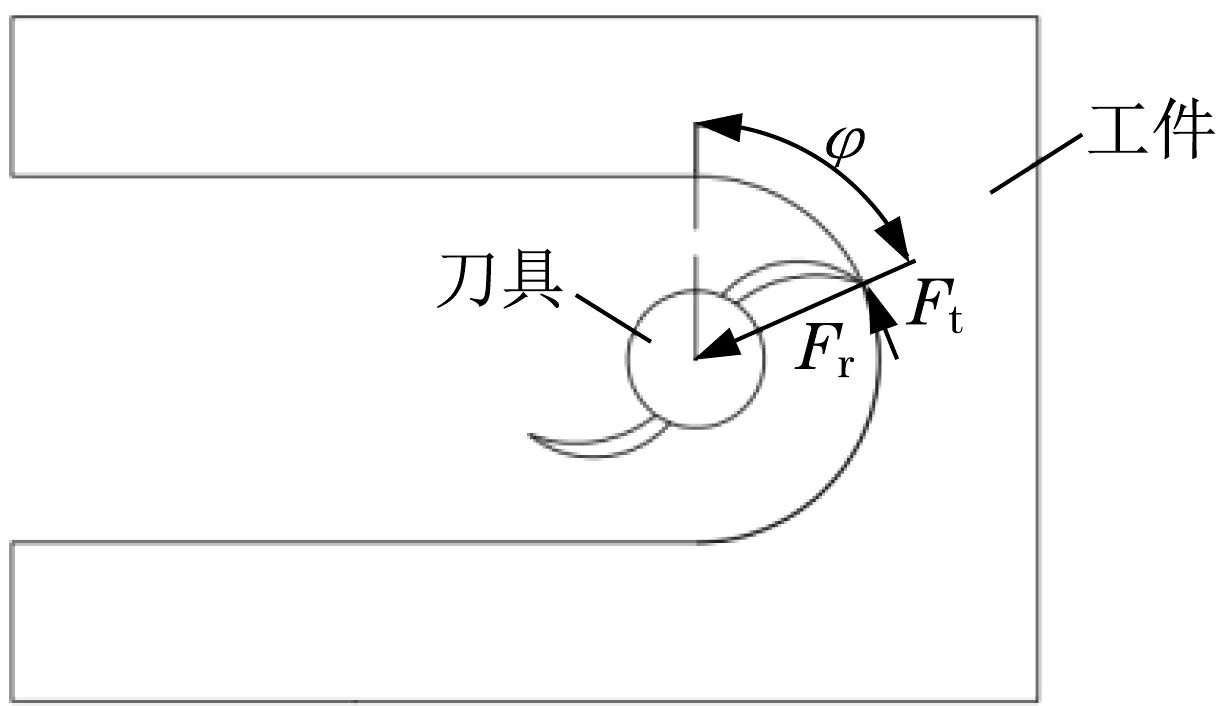
图4 刀具受力情况Fig.4 Tool stress condition

式中:h0为刀具额定每齿进给;T为刀具每齿周期;m为刀齿数;ω为机床主轴角速度。
当只考虑1 个切削刃时,由图可知,当2kπ ≤φ≤(2k+1)π,k为自然数时,单个切削刃受到的进给方向的力为

切削角φ=ωt+φ0,φ0为取初始切削角。刀具在某一时刻的受的进给方向的力等于同一时刻所有切削刃受到的进给方向的力的叠加,且kr远大于kt(见表3),有

切削力对刀具所做的虚功为

将刀柄—刀具的区域耦合视为7 个点耦合,主轴对刀柄做的虚功为
由最小势能原理,得

则刀具运动方程为

2.5 系统运动方程及参数取值
由主轴、刀柄、刀具运动方程可得系统运动方程为
主轴材料为40Cr,刀柄材料为45号钢,刀具材料为W18Cr4V,电磁铁材料为坡莫合金,杆组材料为45号钢,参数取值如下:Es=Eh=El=2.11×105N/mm2,Et=2.25×105N/mm2,kω1=kω2=5×105N/mm,kθ1=kθ2=5×108N‧mm/rad,k=60 000 N/mm,d=h=10 mm,Re=95 mm,N=5,m=2,kr=0.3 MPa,ρs=ρh=7.85×10-6kg/mm3,ρt=8.26×10-6kg/ mm3,cω1=cω2=10 N ‧ s/mm,cθ1=cθ2=104N‧mm‧s/rad,l=12 mm,re=55 mm,n=20 mm,μ=100 H/mm,kr=2 000 MPa,φ0=π/4。
3 制振效果仿真
得出了振动微分方程后,在主轴转速分别为600、800、1 000 和1 200 r/min,切削宽度为6 mm,每齿进给为0.2 mm 的条件下,对动力吸振器的制振性能进行了时域和频域的仿真探究,铣刀刀尖振动图像如图5和图6所示。各频率下动力吸振器的质量分别为4.0、3.7、3.3和3.0 kg,电流分别为16.0、17.5、19.0和20.5 A。

图5 不同主轴转速下刀尖时域响应Fig.5 Tool point’s transient time domain responses with different spindle speeds
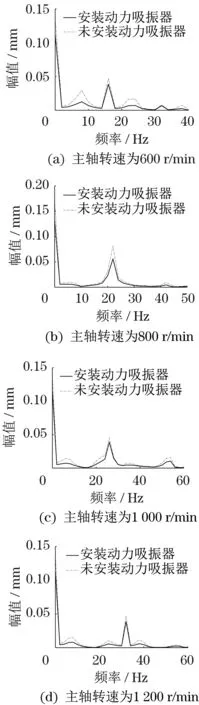
图6 不同主轴转速下刀尖频域振动图像Fig.6 Tool point’s steady frequency domain responses with different spindle speeds
由图5 可知,在不使用动力吸振器时,各主轴转速下刀尖点振动稳态前最大振动幅值分别为205、199、194 和191 μm,稳态后最大振动幅值分别为103、180、128 和103 μm,到达稳态用时分别为0.34、0.14、0.14 和0.22 s;使用动力吸振器时,各主轴转速下刀尖点稳态前最大振动幅值分别为145、144、143 和142 μm,稳态后最大振动幅值分别为80、130、105 和78 μm,到达稳态用时分别为0.20、0.07、0.05和0.14 s。
由图6 可知,各主轴转速下,刀尖振动的主振频率分别为17、22、27 和33 Hz,动力吸振器对主振频率的振动皆有抑制效果,主轴转速为800 r/min时,抑制效果最佳,达到30%。
4 结论
本文提出了一种刚度和质量可调的半主动型电磁动力吸振器结构,并进行了周铣机床主轴-刀柄-刀具-动力吸振器系统的数值仿真探究,主要结论如下:①此动力吸振器具备机床主轴转速在600~1 200 r/min 范围内的带宽制振能力。根据仿真探究的结果,对时域,稳态前减振效果最高为25%,稳态后减振效果最高为30%,到达稳态所用时长最多削减50%。对频域,对主振频率下的振幅减振效果最高为30%。②要达到较优的减振效果,必须根据主轴转速合理设置电流大小和附加质量块的质量。在600、800、1 000和1 200 r/min的主轴转速下,质量分别为4.0、3.7、3.3 和3.0 kg,电流分别设置为16.0、17.5、19.0 和20.5 A,使减振达到较优的效果。
