基于实时引导修正的大口径天线对星快速校相方法
2022-03-22侯锦
侯 锦
(1 中国电子科技集团公司第三十九研究所 西安 710065 2 陕西省天线与控制技术重点实验室 西安 710065)
引言
随着卫星数传技术的发展和遥感数据接收需求的增加,越来越多的测控系统除了具有S 频段测控性能以外,又通过改造或新研等方式扩展了X 频段,由S 频段实现上行信号的发送与目标下行遥测数据的接收,X 频段和Ka 频段则用于图像等大数据量数据的接收。通常来说,大口径天线具有较高的增益,可为系统数据接收提供更高的信号质量,因此一些10 m 以上的大口径天线系统往往成为了数传接收的主力。随着测控技术的发展,为满足如X 频段航天器的跟踪和测角需求,要求地面测控系统具备对X 频段空间目标实现精确跟踪和测控能力。
大口径抛物面天线对空间目标的精确跟踪主要通过将跟踪接收机或综合基带输出的误差电压,折算成目标与天线电轴的空间角度差,经由天线控制系统的位置调节器进行闭环控制,完成天线电轴对目标的精准指向。
测控系统正常跟踪需要修正接收机或综合基带的相位和增益系数,保证系统的方位俯仰误差电压的交叉耦合和定向灵敏度满足跟踪要求,因此相位正确校准是测控任务中的重要环节[1-3]。最后,当测控系统处于跟踪时,结合测角修正模型对测量系的误差进行修正,对外提供满足目标空间测量精度[4,5]要求的角度数据。
1 对星快速校相方法
1.1 快速校相原理
对星快速校相是以航天器为目标进行的快速校相。快速校相是一种快速校准多模馈源和差通道相位差的方法,它适用于配备多模馈源的AE座架形式的抛物面天线,整个过程耗时短,和差通道相位差计算准确率高,在目前地面测控系统自动化运行流程中对目标的捕获跟踪起着关键作用。其方法是使天线电轴处于目标主瓣内,利用空间目标与抛物面天线的坐标关系、链路传输等产生的和差相差σ、多模馈源输出的方位和俯仰误差电压模型,再在方位或俯仰空间的主瓣内偏开一定角度,利用误差电压和偏开的角度,计算出和差通道的相位差,如图1 所示。
图1 中,θ为目标偏离电轴的偏角,θ1、θ2为天线在主波束内两个位置下的目标偏离电轴的偏角;Φ为目标偏开角度在A、E平面的投影分量,Φ1、Φ2为天线在主波束内两个位置下的目标偏开角度在A、E平面的投影分量,设和差通道相差为σ,则方位俯仰误差分别满足:
为消除产生交叉耦合的σ,我们利用偏开一个轴向,在另一个轴上耦合出的误差电压为0 这一计算条件,代入上式可计算出σ,在方位、俯仰和差支路上进行相位修正,使系统具有优良的交叉耦合特性。以俯仰为例,需要使两点偏开的方位误差电压之差为0,则有:
1.2 对星快速校相的实现方法
如图2 所示,以航天器为目标进行快速校相时,需使用到目标的引导数据,如程引或数引,引导天线使目标处于天线波束主瓣范围内,然后在以时间为序列的引导源上叠加恒定的方位或俯仰的位置偏移ΔEL对目标进行空间拉偏,在记录前后两点的位置和误差信息后,根据式(5)可以计算得到σ。
对于抛物面测控天线,其口径、波长(频率)和半波束宽度的关系可以近似为:
其中,λ为波长,f为工作频率,c为光速,D为天线口径。可以看出,天线口径越大、频率越高,天线主波束越窄。以常用的S 频段2.0 GHz~4.0 GHz、X 频段8 GHz~12 GHz 为例,对同一口径天线而言,X 频段主波束宽度约为S 频段的三分之一到四分之一。表1 中列出了3 种典型大口径天线在S 频段与X 频段下的半波束宽度。

表1 天线半波束宽度与口径及频段的关系Table 1 The relationship between antenna half beam width and aperture and frequency
依据抛物面天线辐射特性和误差电压和差关系,结合快速校相原理,为使相位计算结果正确可用,校相过程应保证天线电轴指向处于主波束内,使综合基带输出的电压满足跟踪极性和增益等要求。当误差电压极性错误、增益斜率不对或相位计算错误,将出现跟踪不稳或天线飞车,不能满足跟踪精度的要求甚至丢失目标。因此,在进行对星校相时要在以下两个方面进行保证,一是天线电轴尽量准确地指向目标,引导源精度越高越好,同时应采取措施减小天线指向误差,使目标处于天线主瓣内;二是合理设置拉偏角度,保证拉偏后电轴仍处于主波束内。拉偏角度可以依据波束宽度进行计算和选取,引导源的精度一般通过轨道计算软件保证,而减小指向误差、提高天线对于目标指向精度则可以通过指向误差参数标定和修正实现。
2 天线指向误差参数分析
指向误差可分为系统误差和随机误差。系统误差是有规律的误差,可根据产生系统误差的原理确定出误差模型并建立适当的误差模型公式,通过标定各个误差系数值,来减小或消除系统误差[6-8]。随机误差是纯粹的随机量,无法进行标定,在指向精度上主要考虑系统误差的影响。
采用方位-俯仰转台座架的测控天线,具有机械轴和电轴,机械轴结合编码设备产生角度测量数据,电轴是对准空间目标的指向。在有大地标定条件的天线系统中一般引入光轴,通过望远镜和编码器角度标定,使光轴代替机械轴获得较为准确的机械轴角度测量数据,代表目标指向;电轴为对准目标时对应电轴的位置,是实际跟踪产生的测量数据,实际角度测量系统中需要消除机械轴和电轴的误差来获取精确的测量数据,通过标校塔信标的跟踪和望远镜光标可获得光电轴之差。因此,根据方位俯仰轴空间指向、机械安装和电轴跟踪原理,分析误差来源,其系统误差参量主要包括:
①方位零值误差A0:为方位机械轴编码角度零值与正北大地测量零值的误差。
②俯仰零值误差E0:为俯仰机械轴编码器角度零值与大地水平测量零值的误差值,与A0一般通过大地标校获得。
③大盘不水平角θM:天线的俯仰机构安装于方位转台平面上,由方位基础平台不平导致的方位转台平面倾斜,不同方位角度下倾斜角度不同,影响天线的方位和俯仰的指向精度。
④大盘最大不水平角处的方位角AM:通过大盘不水平测试来计算和标定。
⑤方位轴与俯仰轴不正交度δ:俯仰轴与方位轴在机械加工、装配时产生的不正交偏差误差,通过仪器测量得到。
⑥光轴与俯仰轴不垂直误差Kb:由望远镜读数进行标校。
⑦光轴与方位轴、俯仰轴不匹配误差KZ、Kn:通过大地测量进行标定的光轴与跟踪方式下电轴角度的误差,经光电标校测试标定。
⑧重力变形引起的俯仰误差ΔEg:主要为重力作用下反射面几何形状变化引起的误差,俯仰轴的重力矩是仰角的余弦函数,通过天线正倒镜测试得到。
⑨大气折射修正值ΔEd:即电波折射误差,受大气的温度、湿度和气压等参数影响,与空间高度和水平方向有关,获得的气象参数代入公式计算得到[9,10]。大量测试证明垂直方向的大气折射效应影响为水平方向的10 倍以上,所以一般只考虑俯仰大气折射修正。
根据各误差项的意义得到基于上述误差参数的误差模型参见式(7)和式(8):
其中,AC、EC分别为目标经方位、俯仰轴编码器获得测量值,AZ、EZ为经误差修正后的目标真值,ΔEd按照国际电联ITU 提出的低仰角精确计算参见下式:
式中,t为地面温度,P为地面大气压值,Pe为根据地面水气压和湿度结合温度计算的参量,U为地面相对湿度。
通过天线角度标校可以获得上述误差参量,结合测站气象设备获取的气象数据,利用误差修正模型可以计算方位和俯仰指向的误差,对测量数据进行修正。对于S 频段信号的小口径天线其波束较宽,所受的影响不大,一般可不考虑电波折射。随着频段的升高,口径的增大,ΔEd在低仰角下带来的影响不能被忽略。
需要说明的是,大口径天线及超大口径抛物面天线随着口径增大,如35 m 及66 m 等,一般其X 频段、Ka 频段无法满足标校塔远场条件不能进行光电标校,目前广泛采用射电星标校方法[11-14],在这种标校模型中直接使用机械轴与电轴的误差参数,不再引入光轴来对机械轴进行校准,射电星标校模型参见下式:
式中,KE为电轴与俯仰轴的不正交误差,其他参数与式(7)和式(8)基本一致。
3 修正引导源以减小天线对目标指向的误差
通过前面的分析可知,由于指向误差的存在,使目标实际位置和天线电轴指向位置存在误差,为了使天线电轴能尽量准确地指向目标,根据前文指向修正模型,结合误差参数对引导源进行反向修正,为天线系统提供更高的目标指向精度。设引导数据与天线测量系命令的方位和俯仰误差分别为ErrAZ及ErrEL,对引导源的误差修正根据式(7)、式(8)计算,参数与指向误差修正模型中的定义一致,方位和俯仰当前引导数据上叠加ErrAZ及ErrEL即可提高天线对目标的指向精度。
若使用射电星角度误差修正模型,叠加至引导源的误差修正根据下式计算:
4 工程验证及应用情况
实际工程中以某18m 口径的天线作为验证对象,对X 频段数传目标进行了对星快速校相测试。在未对引导数据进行修正的情况下,进行了6 次校相,成功率约为50%。依据该站的测角误差修正参数,对引导数据进行修正,采用式(7)、式(8)的修正模型,进行了6 次校相,成功率为100%。以某圈引导数据为例,修正量参见表2,其修正误差参见表3,通过修正前后的数据分析,可以看出对同一目标,修正后目标的AGC 有所提高,修正对于提高目标指向精度有积极贡献。

表2 数据实时修正Table 2 Real-time data correction
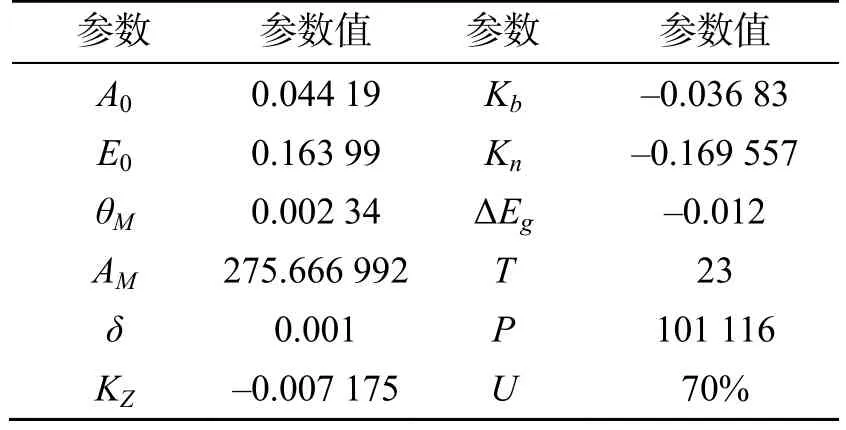
表3 测角误差修正参数Table 3 Angular error correction parameters
表4 列出了部分校相结果,对X 频段某一频点,校相结果一致性好,跟踪满足要求。

表4 俯仰拉偏下对星快速校相测试结果Table 4 Phase correction results by satellite under EL pull
5 结束语
目前,二代导航、载人航天、嫦娥工程的设备基本都采用了本文介绍的快速校相技术,在信道正确配置的情况下,S 频段校相成功率接近100%;X 频段大口径天线在使用了文中对引导源的修正后,校相成功率也接近100%。交叉耦合可满足1/5 以上,对于误差电压的正交性给予了极高的保证。由于其快速性的特征,与数引、程引工作方式结合,利用误差修正模型的实时引导修正,形成对星校相方式,可满足对X目标的测控数传跟踪要求,本文介绍的方法已应用于某天线口径为18 m的测控数传设备上,效果优良。
