基于运动参数估计的中轨道星载SAR舰船成像算法研究*
2022-03-22廖婉伶黄祖镇
赵 彬,廖婉伶,朱 鑫,黄祖镇,张 云✉
(1 哈尔滨工业大学电子工程系 哈尔滨 150001 2 中国电子科技集团第十四研究所 南京 210012)
引言
随着海洋经济的快速繁荣和海洋权益斗争形势的日趋严峻,对广袤蓝色国土的有效监控,已经成为关系国家利益和安全的重大战略问题。我国是一个拥有300 多万平方千米海域、1.8 万千米海岸线的海洋大国,海洋的重要性不言而喻。对海监测是维护海上秩序和保障海洋安全的重要手段,海上舰船是对海监测的重要目标,合成孔径雷达SAR(Synthetic Aperture Radar)具有全天时、全天候并且可以远距离高分辨成像的特点,对舰船目标的侦察具有重要意义。常规的机载SAR 和低轨星载SAR 已经广泛运用于舰船目标成像中,但低轨SAR的覆盖范围和高分辨之间是互相矛盾的,而且对同一地区的重访周期比较长,单次过顶可观测时间较短,很难实现目标的连续监测。
针对这些问题,一种有效的解决方案是将SAR 系统搭载在更高轨道的卫星上,Tomiyasu 等人提出了地球同步轨道合成孔径雷达GEO SAR(Geosynchronous Synthetic Aperture Radar)的概念,分析了GEO SAR 重访周期短,覆盖范围广等优点[1]。美国GESS 研究小组在2003 年发表的研究表明,当卫星轨道高度超过10 000 km 时,仅靠提升卫星轨道高度来增加SAR的覆盖范围意义不大。德国宇航局的Jalal Matar 在2016 年讨论了中轨SAR的轨道设计以及相应的覆盖范围,分析了SAR的性能随轨道高度增加而发生的变化,提出了采用重访周期仅为三天且几乎覆盖全球范围的轨道[2]。2018 年,Jalal Matar 又给出了中轨SAR 系统技术方面所面临的挑战[3],描述了中轨SAR的宽覆盖和高时间分辨率的特点,发展中轨道SAR的干涉和极化具有广泛的应用价值。众所周知,当SAR 载荷位于轨道比较高的情况下,合成孔径时间会大大增加,合成孔径时间内一些非合作运动目标的成像遇到困难,有效积累时间内目标的运动导致SAR 成像严重散焦甚至无法成像。作为低轨SAR 和GEO SAR的折中,中轨SAR 结合二者的优点,实现广域监测的同时还能极大缩短重访周期,合成孔径时间也能根据发射信号的频段选择控制在百秒以内,这对舰船目标的成像是有利的。因此,研究中轨SAR 系统下的舰船目标成像方法是未来对海监测的迫切需求。
目前,对舰船的成像大都是选择舰船目标所在距离单元的数据进行参数估计,将方位向回波视为二阶的线性调频信号处理,估计出回波的多普勒频率和多普勒调频率,然后进行补偿。在中轨SAR的情况下,长积累时间下卫星轨道的曲率和远距离下雷达平台的非“走-停”问题不能忽略,传统的二阶斜距模型不再适用,因此需要对运动舰船的成像方法进行一定的改进。本文先从中轨SAR的斜距模型入手,分析不同发射信号载频下的合成孔径时间和对应不同斜距模型的相位误差,选择合适的成像斜距模型,分析舰船不同的运动状态引起的回波相位误差;然后根据斜距模型分析给出基于多普勒参数估计的舰船二维速度估计的方法,并提出一种基于二维速度估计的运动舰船成像的方法;最后用实验仿真验证了本文所提方法的有效性。
1 中轨SAR 成像几何构型及成像特性分析
1.1 中轨星载SAR 几何模型
中轨SAR 是一种将SAR 雷达载荷放置在中轨道卫星上的主动式遥感雷达,卫星的轨道特性会直接影响SAR 回波的多普勒特性,分析其几何构型是研究成像机理的基础。本文研究中轨星载SAR的几何关系,主要在卫星局部坐标系、地心直角坐标系和地面局部直角坐标系中描述。其中卫星局部坐标系用于分析卫星姿态和雷达天线指向等问题,地心直角坐标系用于描述卫星相对于地球运动关系,地面局部直角坐标系用来描述地面成像平面。地心直角坐标系和地面局部直角坐标系的转换关系如图1 所示,其中O表示地心,地心直角坐标系以O为原点,格林尼治子午线为X0轴,在赤道平面内垂直于X0轴的为Y0轴,Z0轴满足右手定则。S表示卫星,P点表示地面参考点,一般选取为雷达天线的波束中心点。
在地面局部直角坐标系中,P为坐标原点,方向为Z轴,用于描述高度,在OPS平面内,点P处的切线方向为Y轴,X轴满足右手定则。在O-X0Y0Z0坐标系中,各点的坐标在文献[4]中有详细的介绍。下面给出P-XYZ坐标系的方向向量在O-X0Y0Z0中的表达式。
从地心坐标系到地面局部直角坐标系的转换矩阵为T=[xT;yT;zT],在地面参考点P选定之后,将各点在O-X0Y0Z0下的坐标沿着三个轴进行投影便可得到在P-XYZ坐标系下的坐标。坐标转换之后,可以将中轨SAR 模型用航向、距离向以及高度等有具体物理意义的维度来描述,后续内容的分析均在地面局部直角坐标系下进行。
1.2 斜距模型分析
低轨卫星运行的角速度比较大,转过θΔ 需要的时间比较短,合成孔径时间比较短,在合成孔径时间内运行的轨迹可以近似等效为直线,回波斜距模型采用直线斜距模型即可。中高轨SAR的合成孔径时间比较长,轨道的曲率问题不能忽略,需要考虑高阶斜距模型。将目标到雷达的瞬时斜距R在孔径中心时刻tc处进行四阶泰勒展开,即
上式中,k0表示中心参考斜距,ta表示方位向时间。假设参考点处的斜距矢量为R0,速度为V0,加速度为A0,二、三阶加速度分别为B0、C0。定义α0~α4为
则高阶斜距展开的系数分别为
斜距模型的阶数越高,回波信号的频谱推导越复杂,计算量也会变大,因此需要从系统设计的角度去选择合适的斜距模型。SAR的距离向高分辨主要靠发射大时宽带宽信号(一般为线性调频信号)实现,方位向的高分辨依赖于雷达天线照射目标时间内的相干积累实现。由于卫星相对于地心运行的轨迹为曲线,方位分辨率ρa由雷达发射信号波长λ和在雷达天线照射目标的时间内雷达相对目标转过的角度Δθ来表示,即ρa=λ/2Δθ。合成孔径时间为卫星转过角度Δθ所需要的时间,文献[4]利用级数展开的方法,给出了曲线轨迹SAR的合成孔径时间的数值解析式。
假设卫星轨道高度为8 000 km,轨道倾角为15°,轨道偏心率为0.001,系统设计的方位分辨率为2 m,雷达发射信号载频5.2 GHz(C 波段)。根据文献[5]中的方法解出的合成孔径时间随卫星轨道位置的变化如图2 所示,在远地点处,卫星相对于地球运动的速度最小,合成孔径时间最长,为32.57 s;在远地点处,卫星相对于地球运动的速度最大,合成孔径时间最小,为32.14 s。合成孔径时间随着卫星位置的变化是由于轨道的偏心率造成的,在远地点处合成孔径时间最长,因此选择远地点来分析斜距模型的适用性,当斜距模型与真实斜距模型之间的相位误差大于π/4 时,斜距误差会对成像造成影响。图3 为在合成孔径时间里不同近似斜距模型引起的相位误差,二阶斜距模型的最大相位误差已经超过了π/4,三阶斜距模型和四阶模型的最大相位误差都远小于π/4,四阶模型具有更大的计算量,因此在满足成像要求的前提下,优先考虑三阶斜距模型。
在中轨SAR 系统中,由于回波时延增大,“走-停”假设会引入额外的相位误差。为了使斜距模型表达式具有一致性,文献[6]推导出了斜距系数误差的表达式。
式中c表示光速,通过以上分析,中轨SAR的回波信号可以表示为
其中,tr表示快时间,f0为发射信号载频,Kr为发射信号调频斜率,斜距引起的回波时延τ为RTR(ta)/c。高阶斜距模型表示的回波模型,无法利用驻定相位原理去求解回波二维频谱,采用级数反演法MSR(the Method of Series Reversion)可以近似得到回波的二维频谱[7],对二维频谱进行分离可以得到方位压缩项X0、距离徙动项X1、距离压缩项X2、三次耦合项X3,在成像处理时,对各阶相位项需要进行补偿,式(8)~式(9)给出具体表达式。
令
进一步,二维频谱的各相位项表示为
式中fr为距离维频率,fa为方位维频率,λ为信号波长。
1.3 舰船运动对回波相位的影响
假设舰船运动的速度矢量为Vp=[vpx,vpy,vpz]T,雷达运动的速度矢量为V0=[v0x,v0y,v0z]T。将式(3)中的V0改为V0-Vp并带入式(3)中和式(4)中可以得到舰船运动情况下回波历程的斜距系数k1′、k2′、k3′。图4~图6 为舰船切向速度vpx(X轴方向)从-30 m/s 到30 m/s 变化和Y轴方向速度vpy从-30 m/s到30 m/s 变化时,在合成孔径时间内引起的各阶相位误差。
从上面仿真的结果可以看出,X方向的速度主要影响二阶相位,线性相位误差和三阶相位误差均小于π/4;Y方向的速度主要影响一阶相位,对二阶相位和三阶相位的影响虽然比较小,但二阶相位误差大于π/4,在成像处理时不能忽略,三阶相位也与π/4 在同一个数量级,合成孔径时间比较长的情况下也必须考虑。
2 基于二维速度估计的舰船目标成像
2.1 二维速度估计
在1.3 节的分析中,舰船X方向的速度和Y方向的速度都会对回波相位造成很大的影响,当相位误差不能忽略时,会使成像结果散焦,严重时甚至不能成像,要想获得高分辨的舰船图像,就必须从回波信号中准确估计出舰船的运动参数。
舰船有vx和vy两个未知的运动参数,需要两个方程来求解,利用多普勒中心fDC和多普勒调频率fDR两个参数,对多普勒相位分别求一阶导数和二阶导数可得
式中R0=[r0x,r0y,r0z]T为参考点到雷达的斜距矢量,不考虑舰船的上下运动分量vpz,根据图4的仿真结果表明,X方向的速度对线性相位的影响比较小,可以忽略。不考虑上式第一项和第三项的影响,解得Y方向的速度为
解得X方向的速度为
通过上述过程,结合星载SAR 精确的惯导数据与回波的多普勒参数估计,便可以解出舰船的二维速度。
舰船速度估计依赖于多普勒参数,常用的多普勒中心频率估计的方法有频域峰值法、频域能量均衡法和相关函数法等。运动目标回波信号的方位谱展宽,使用频域峰值法的估计精度较差,而使用频域能量均衡法和相关函数法估计精度相对要好些。多普勒调频率估计采用鲁棒性强的方法如最小熵法,该算法较为稳健,参数估计精度高。本文采用相关函数法和最小熵法分别估计多普勒中心频率和调频率,进一步估计二维速度和,估计的舰船运动矢量为,将式(3)中的0V改为分析修正的斜距模型在合成孔径时间内的各阶相位误差,各阶误差结果如图7~图9 所示。
修正后斜距模型的误差来源于速度估计,而速度估计的精度取决于多普勒参数估计的精度,仿真的结果证明采用相关函数法和最小熵法估计多普勒参数精度已经足够,从仿真的结果可以看出,估计的二维速度精度较高,通过速度修正后斜距模型的相位误差降低,各阶相位误差均小于π/4,满足成像要求。
2.2 舰船目标成像算法
利用2.1 中的方法将舰船的运动参数估计出来,可以得到舰船的速度矢量,利用速度矢量去修正斜距展开系数,采用修正后的斜距系数重新处理回波数据,完成运动舰船的聚焦。图10 给出了基于速度估计的舰船目标成像方法流程图。
具体算法步骤如下:
①对原始回波数据进行距离压缩,通过卫星惯导数据R0、V0、A0、B0、C0得到初始斜距系数k0~k3和“走-停”斜距误差系数Δk0~Δk3;
② 将数据变换到二维频域,利用k0~k3和Δk0~Δk3计算初始的相位耦合项X1、X2和X3,进行距离徙动校正、二次距离压缩和三次相位去耦合,将数据变换到二维时域,完成数据距离维的粗处理;
③选择舰船目标所在区域的数据,利用相关函数法估计回波数据的多普勒中心频率,计算其与fDC的差值ΔfDC,根据式(12)估计出Y方向的速度;
④ 利用最小熵法(或其他鲁棒性强的方法)估计所选数据的调频率,由式(14)估计出X方向的速度,舰船的运动矢量可以表示为
⑤ 将①中的V0更新为V0-,重新进行步骤①和②,完成数据距离维的精处理;
⑥ 计算方位压缩项X0,将数据变换到方位时域,补偿方位压缩项后换到二维时域,便可得到聚焦的运动舰船图像。
2.3 仿真结果与分析
海上舰船目标一般尺寸比较小,为了后续对舰船目标的分类与识别,SAR 图像的分辨率要尽可能高,L 波段多用于海洋监测和环境监测等领域,X 波段多用于高分辨成像,但在星载SAR 系统中X 波段的实现难度比较大,因此选择二者折中的C 波段用于舰船目标成像比较合适。为了验证所提方法的可行性,本文在C 波段情况下进行了中轨SAR 运动舰船目标成像的实验仿真,中轨SAR 具体的轨道参数以及雷达系统参数见表1。
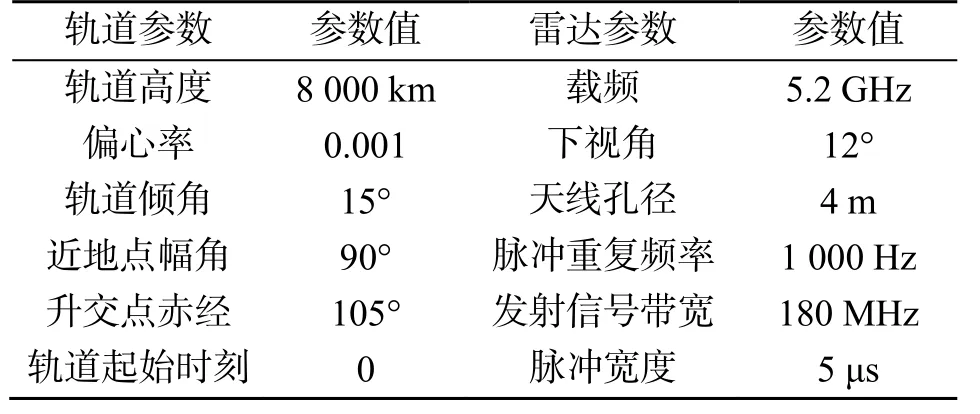
表1 中轨SAR 系统参数Table 1 Parameters of MEO SAR system
在轨道存在偏心率的情况下,在远地点卫星的运行速度最小,合成孔径时间最长,本文的仿真假设卫星经过远地点。
假设舰船目标在合成孔径时间内为匀速直线运动,海上舰船的运动速度大小一般都在30 节之内,本文仿真的舰船运动速度也在这一范围内变化。具体的仿真参数见表2,其中速度的负号表示与坐标轴的正方向相反。对仿真的回波数据采用本文提到的方法进行运动参数估计结果也在表2 中列出。
从表2 来看,在海上舰船目标常用的速度范围内,大多数情况下,本文所提的方法都能比较准确地估计出舰船目标的二维运动参数,第13 组和15 组的Y轴方向速度估计结果误差比较大,第16 组X轴速度估计结果误差比较大。通过仿真发现,在对回波进行参数估计时估计误差与选取的回波数据有关,本次仿真所有组选取数据的方式均一致,因此会出现少量估计误差比较大的组。
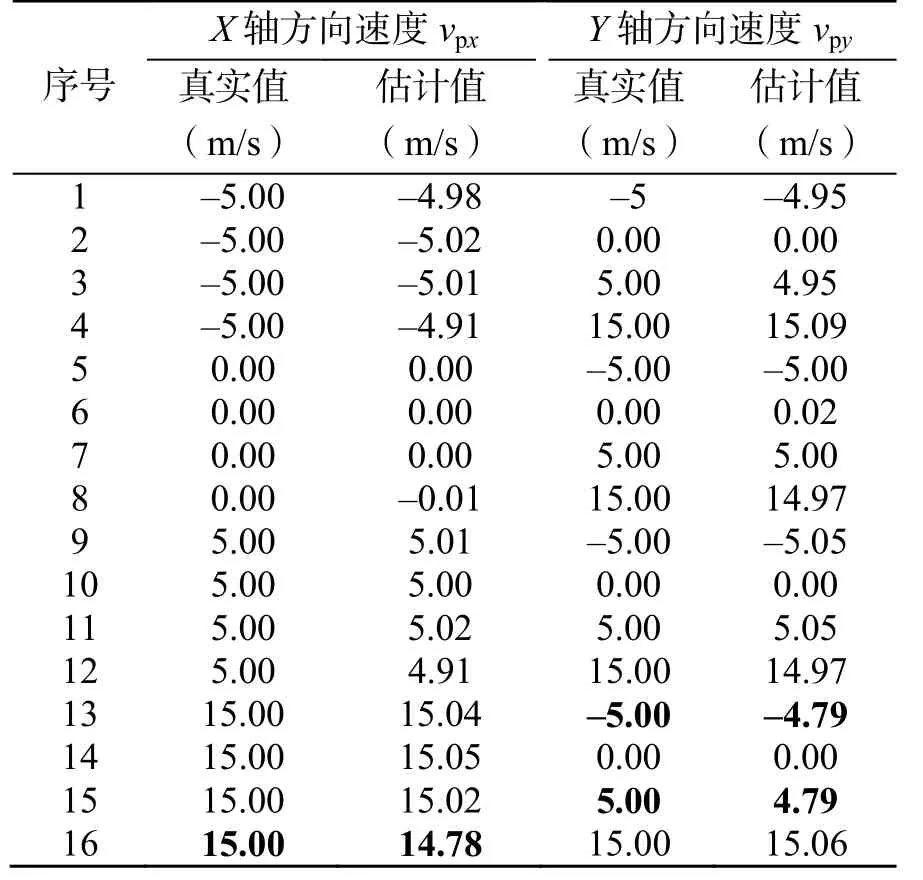
表2 运动舰船运动参数估计结果Table 2 Estimated results of ship motion parameters
利用估计出来的速度重新计算斜距系数,对回波数据做精确的距离维处理和方位压缩。本文选用上述的第4、7、13、16 组数据进行重新聚焦处理,得到的对比结果如图11~14 所示。
图11 中vpx为-5 m/s,vpy为15 m/s,图11(a)为未进行速度估计的成像结果,方位向严重散焦,进行速度估计并补偿后,可获得舰船目标重新聚焦图像,如图11(b)所示;图12 中vpx为0,vpy为5 m/s,对比图12(a)和图12(b),由于存在径向速度使得成像位置发生了偏移;图13 中vpx为15 m/s,vpy为-5 m/s,图13(a)中散焦严重,经过速度估计和补偿之后图13(b)重新聚焦;图14 中vpx为15 m/s,vpy为15 m/s,图14(a)中散焦比前几组更加严重,经过速度估计和补偿后聚焦性能有很大改善。
仿真结果说明,通过估计出的速度矢量修正斜距系数来进行运动舰船目标成像具备可行性,Y轴方向速度对二次相位和三次相位误差的影响比较小,对目标的聚焦性影响较小,但影响速度归集精度,估计vpy后才能估计vpx。图14的结果表明,如果vpx估计精度不够会使回波中存在残余的二次相位误差,造成图像发生一定的散焦,可以通过重新选取数据进行估计来提高估计精度,也可以采用相位梯度自聚焦算法(PGA)来实现精聚焦。
3 结束语
本文针对中轨SAR 体制下海上运动舰船目标的成像问题,根据中轨SAR的轨道模型,建立了适合描述舰船运动的几何模型,分析了C 波段情况下不同阶数斜距模型的适用性。计算出了在常规的速度范围内,舰船二维运动引起的中轨SAR 回波各次相位误差。给出了利用卫星运动参数和多普勒参数估计相结合的舰船二维速度估计方法,进而提出了一种基于二维速度修正斜距系数的中轨SAR 舰船目标成像的方法。仿真实验结果表明,在估计数据段选取合理的情况下,本文方法估计出的速度误差小于0.1 m/s,经过斜距系数修正成像后的舰船目标聚焦效果明显,能够满足高分辨成像的要求,验证了本文算法的有效性。此外,在本文研究中没有考虑长合成孔径时间内舰船目标的加速度以及三维转动的影响,这需要后续深入研究。
