医院消杀机器人作业安全与交互设计策略
2022-03-21王秋惠王雅馨
王秋惠,王雅馨
医院消杀机器人作业安全与交互设计策略
王秋惠,王雅馨
(天津工业大学机械工程学院,天津 300387)
作业安全与设计质量对提高医院公共环境消杀机器人“人机系统”运行效率具有关键作用。以人因工程学、交互科学、认知科学理论为视角,探究医院消杀机器人作业安全与交互设计策略。采用层次任务与表格任务结合HTA-T分析法,构建消杀作业任务流程,剖析作业流程中典型安全事故及其致因逻辑,基于工作域分析法(WDA)对消杀作业约束条件进行描述,建立消杀工作域抽象层次模型。并对医院消杀机器人作业SRK认知行为模式(技能型、规则性、知识性)进行判定研究,梳理认知因素匹配关系。构建消杀机器人作业安全设计评估理论模型框架,提出基于功能需求、形态结构、外观色彩和人机交互4大安全指标要素的设计策略。该成果可为医院公共环境消杀机器人人机工效相关基础理论研究及设计实践提供参考依据。
医院消杀机器人;作业安全;人机交互;设计策略;评估模型
随着人工智能技术与现代医疗服务水平的不断提高,智能消杀机器人成为未来医院感染防控的重要装备,为传统医疗空间消毒提供全新的工作模式。其既可减轻繁重的人工作业负荷,又可提高消杀作业效率[1]。但由于医院环境空间、公共设施及医患人员的特殊性,消杀机器人交互作业安全正面临很多挑战。如何构建安全可靠的作业流程、人机交互模式及交互设计策略,是保证医院消杀机器人作业绩效的关键。作业安全分析是对复杂作业的安全管理方法,可对作业过程中危险因素剖析,采取相应预防与改进措施,提出安全原则,防止事故发生和人员伤害[2]。该领域的基础应用研究已取得很多可喜的成果:赵京等[3]从机器人自身和交互安全性2方面分析了机械结构及控制算法对机器人作业安全的作用;李锡江等[4]利用故障树形图分析法分析机器人安全性;黄志清等[5]提出一种基于双分辨率2.5D分层栅格地图的路径规划方法;朱蓉军等[6]设计了机器人人机安全避碰方法;杨占力等[7]通过仿真分析验证纵向翻转影响机器人安全性。关于作业安全的研究,学者主要采用图论分析、事故统计、数据可视化等方法,挖掘作业过程中潜在的危险因素:LI[8]通过分析操作者对危险行为的态度,将危险划分为局部危险与总危险2个等级;文献[9-10]通过路径算法建立最优行动轨迹以此降低避碰风险;文献[11]采用模糊层次分析法建立了安全评价框架,以确定安全指数和警示等级。
综上所述,关于机器人作业安全的研究,目前多针对工作路径规划和避障操作问题,对于安全工作流程设计、人机交互策略,以及界面设计的基础理论研究较为薄弱,尤其在医院消杀机器人作业安全及交互设计理论研究方面。因此,在吸收前人思想的基础上,本文运用人因工程学、交互科学以及认知科学的理论方法,对医院消杀机器人作业交互安全设计策略进行系统研究。
1 医院消杀机器人作业流程构建
1.1 消杀作业任务流程构建
因医院消杀作业的复杂性,消杀机器人与人及环境之间存在一定交互关系。采用层次任务分析法(hierarchical task analysis,HTA)结合表格任务分析法(tabular task analysis,TTA),对医院消杀机器人作业安全交互中的可变因素进行理想化处理,即假设一种通常状态,分析消杀作业任务流程[12]。文献[13]提出了HTA法,其将任务划分为目标、次目标、操作和计划等层次结构,通过收集使用技术、人机交互、团队成员、决策和任务限制等特定数据来完成体系构建,最终输出任务活动的详细描述,并提供完成操作步骤,但该法并不能有效识别作业过程中的差错。而由KIRWAN[14]于1994年提出的TTA法,可将HTA从底层任务抽取出来,并分析每个特定步骤,如潜在差错、时间限制、触发事件等。根据HTA与TTA结合的HTA-T分析法,设计医院消杀机器人安全作业任务流程,如图1所示。
(1) 定义分析任务。对医院消杀机器人消毒作业进行任务分析,预测作业过程中潜在危险因素。
(2) 数据收集过程。对消杀机器人作业步骤、工作方式及功能等信息进行收集。同时可获取相关任务典型事故案例,分析其致因。
(3) 变量理想处理。假设机器人执行任务时信号稳定,系统无异常状态。
(4) 整体目标确定T。将医院消杀作业定义为顶层目标,消杀作业任务执行需要人为参与,作业前需线性完成启动与系统初始化任务R。
(5) 确定次目标S。将消杀作业任务分解为:消毒物质装换、自由消杀、医护消杀、病房消杀,次目标任务之间相互独立。
(6) 次目标分解D。将确定的次目标确定为不同的独立子任务目标。
(7) 子任务操作P。HTA最底层操作可为非线性,因此由子任务目标号决定(如D2和D4下一层任务号P5分别代表不同的操作)。
1.2 作业安全事故成因分析
分析消杀作业流程中的安全事故成因,可有效避免安全作业事故的发生。通过上述作业步骤分解,根据作业性质选择合适的任务种类将HTA转化为TTA表格。将操作层中易出现差错的步骤按性质分为消毒物质准备、放置、消杀模式选择、自动搜索消杀目标、对象识别、转换消杀、任务识别、执行任务位置、移动、交互10个任务描述,结合数据收集获取的典型事故案例中安全致因逻辑,列出其中可能出现的差错及可能的结果,最终提出差错纠正原则(表1)。通过分析得出,按照国家规定标准进行消毒液的准备、自动校准位置、提高机器人自身模式认知和识别能力、保持移动稳定性、对不同用户交互分类能够有效提高医院消杀机器人作业安全性能。

图1 医院病毒消杀作业HTA任务流程

表1 消杀任务作业安全事故成因TTA分析
2 医院消杀机器人安全认知决策
2.1 消杀机器人工作域认知决策
工作域认知是医院消杀机器人作业流程的关键步骤。工作域分析(work domain analysis,WDA)可用于归纳目的描述和所分析系统功能的约束条件,包括工作域的目标、意义和限制条件。抽象层次法(abstraction hierarchy,AH)是WDA的重要方法之一,可直接获得关于WDA的清晰理解。域目的表示工作系统存在的意义,独立于具体情景;域价值可评估域目的范围内作业情况;域功能可以得到作业系统所执行的功能;物理功能列举系统执行的操作;物理对象包含工作系统应具备的条件,该层级独立于研究目的存在[15]。如图2所示,本研究通过AH来描述医院消杀机器人工作域作业系统的功能,通过分析各层级之间连线数量关系,达到安全完成消杀作业这一目的。根据任务及时调整作业,将作业潜在危险度降到最小化,是消杀系统最重要的价值目标。因此要求机器人应优先满足对工作情景的理解,正确识别任务后做出有效消杀决策,并稳定移动至消杀点。细划域功能,得到对消杀作业安全影响力最大的物理功能,即判断作业域是否存在不可躲避障碍物、建立作业流程、描述消杀目标所在位置、描述可躲避障碍物的位置并自我检测作业过程中潜在威胁。为满足物理功能实现的条件,抽象层次模型最底层还输出了医院消杀机器人系统应具备的物理对象。
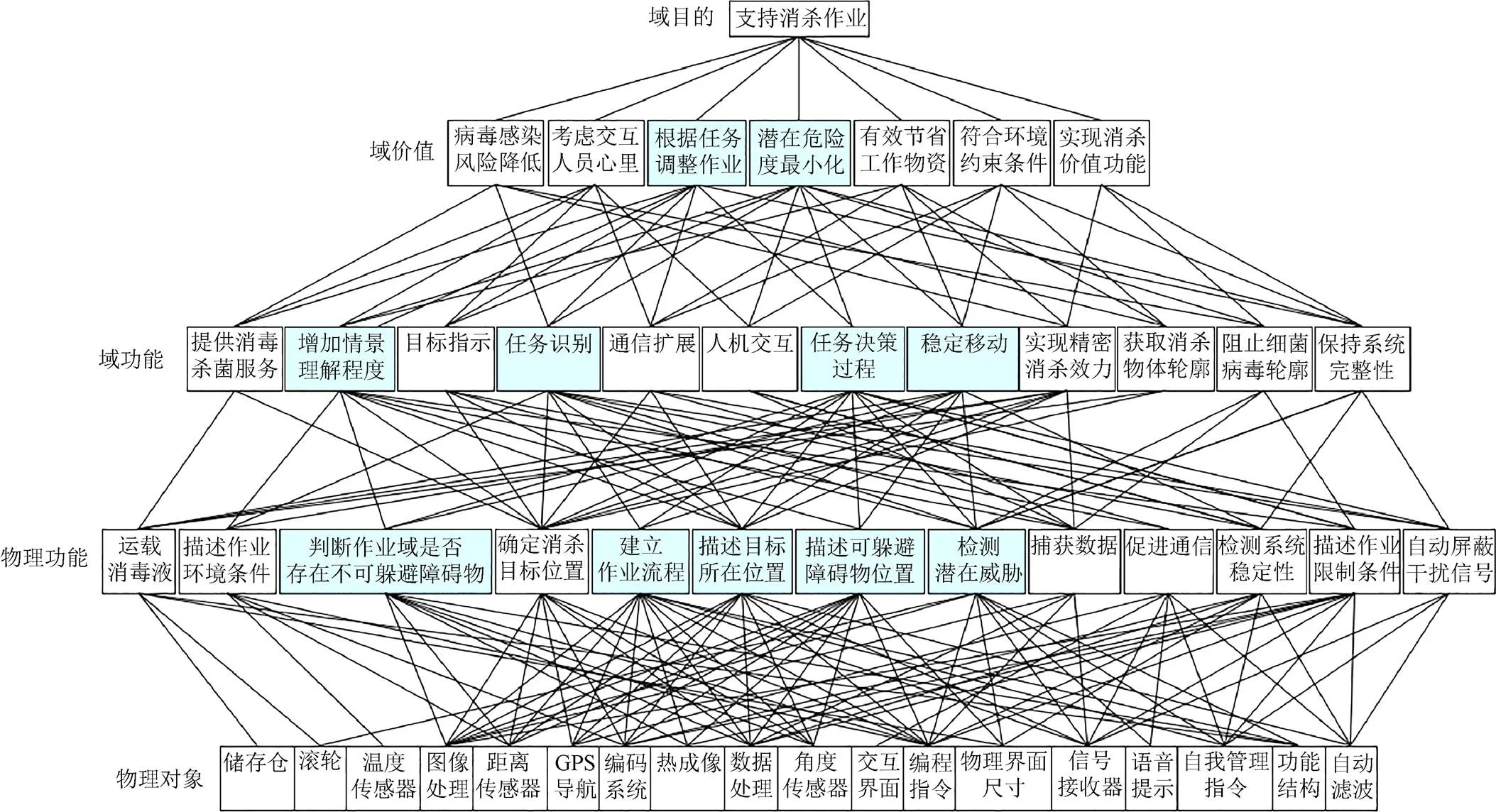
图2 医院消杀机器人工作域抽象层次
2.2 消杀作业安全认知行为模式
由于交互过程的复杂性,消杀机器人不仅要完成目标作业还要进行深度决策任务。当有潜在决策需要时,消杀机器人应自动识别信息数据,若信息识别不明确,将无法做出正确判断。此时任务将出现因分解不全面或无正确识别的结果,安全隐患将由此产生。认知行为模式选择是消杀机器人作业安全决策的前提。SRK (Skill,Rule,Knowledge)框架是RASMUSSEN[16]于1983年提出的,其综合了各种行为过程的特点,将人的认知过程分为3种类型,即技能型、规则型和知识型。本文将SRK框架应用于研究消杀机器人认知决策模型,借鉴蒋英杰等[17]构建的认知行为模式概率化确定方法,根据决策树的认知行为模式判定,消杀机器人作业认知模式由作业操作类型、机器人对作业环境的理解度、程序的需要性、程序的可用性、机器人对程序的理解度、机器人对程序的熟悉程度6种属性的状态决定,决策树上下枝分别代表是否满足此状态。作业过程中环境和消杀任务多变,因此对消杀机器人认知行为模式的影响因素进行分析很有必要。由上述分析得出,消杀机器人对情景的理解、任务的识别、决策和自身移动的稳定性共同影响其作业安全性能,同时直接决定其行为,因此定义为作业认知模式的主要影响因素。为使结果更加准确,本研究结合WDA,将消杀机器人作业认知模式影响因素进行细化,在主要影响因素基础上,选取描述作业环境、确定消杀目标位置、描述作业限制条件、检测系统稳定性共9个匹配因素,并将其输入决策树所对应属性,见表2。由于匹配因素的不确定性,很难对其进行精确度量,因此采用德菲尔专家打分法对9个影响因素的2种状态进行权重判断。选择10名在机器人研究领域经验丰富的专家及10名具备熟练技能的清洁工对匹配因素进行评价,结果取均值,见表3。

表2 消杀机器人认知行为模式匹配
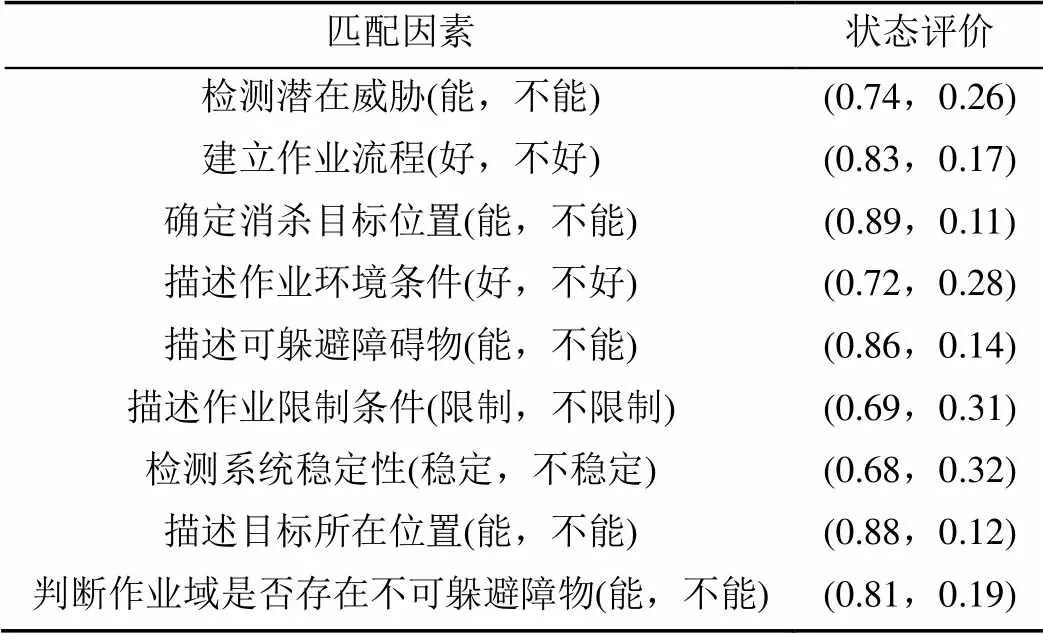
表3 9种匹配因素的状态评价结果
继续邀请20名专家使用层次分析法1~9标度对9种匹配因素打分,得到判断矩阵

将矩阵每一列进行元素归一化处理,元素一般项可表示为
按列归一化矩阵且每行相加,求得各行平均值组成向量,得到每一个指标的权重值,其矩阵最大特征根为
根据一致性检验结果判断每位专家打分结果权重合理,将20位专家打分所得权重结果取平均值得最终每组匹配因素权重,见表4。根据每个匹配因素权重,结合状态评价打分,加权综合得到认知行为模式影响因素最终状态,获得消杀机器人认知行为模式影响因素评价结果,见表5。
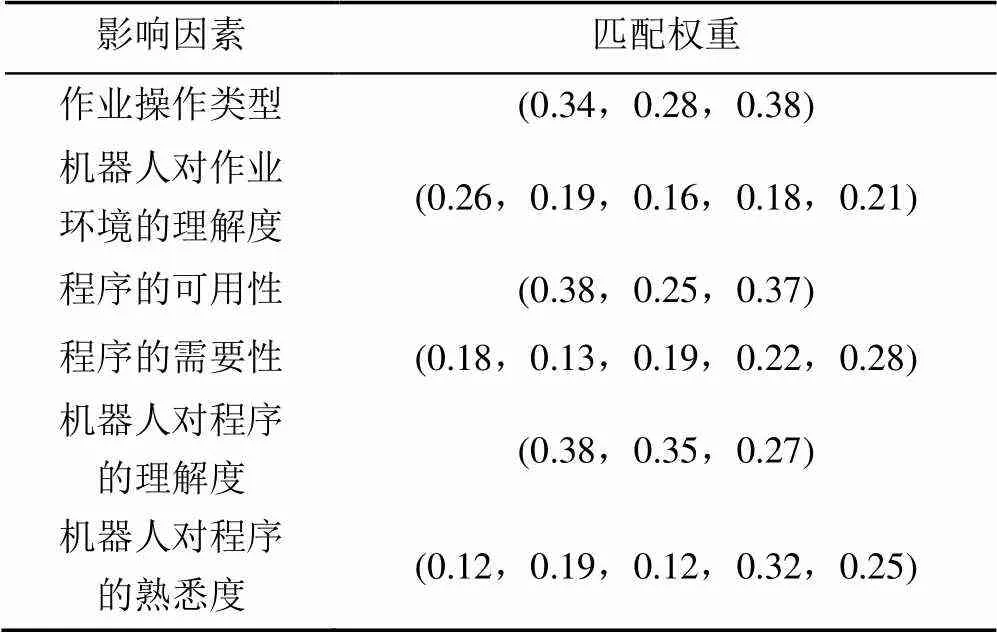
表4 认知行为模式匹配因素权重

表5 消杀机器人认知行为模式影响因素评价结果
根据认知行为模式判定,6种属性状态上下枝概率为,(=1,···,6;=0,1,其中0为上枝,1为下枝),决策树9个输出为(=,···,)。由图3可知,技能型概率skill=P+P+P,规则型概率rule=P+P+P,知识型knowledge=P+P+P[17]。按照以上方法可得消杀机器人概率化认知行为模式结果skill=0.8332,rule=0.0928,knowledge=0.0741。因此消杀机器人作业更倾向技能型认知行为模式,现实作业过程中,机器人需不断练习掌握作业技能,并体现到消杀作业任务中。为达到正确决策目的,设计过程中要合理安排技能表达顺序,使消杀机器人在执行安全设计流程时,对不同作业情景做出正确判断[18]。

3 医院消杀机器人安全交互设计策略
3.1 消杀作业安全评估模型理论框架构建
(1) 理论模型框架由Ip-r (HWA-SRK).4F构成。根据消杀机器人作业流程需求特征[19],通过对工作域AH,对消杀机器人作业规程和清洁工作过程的理解进行决策识别,并对消杀机器人作业认知模式进行概率化判断,如图4所示,构建作业安全评估理论模型框架Ip-r(HWA-SRK).4F:交互过程I、用户P、机器人R、层次任务分析法H、工作域分析W、抽象层次分析A,3种认知行为模式:技能型S、规则型R、知识型K,以及安全设计4要素4F:功能、色彩、造型、界面。
(2) 消杀作业安全评估流程。医院消杀机器人作业安全认知决策流程主要分为感知、认知、决策3个步骤。根据Ip-r(HWA-SRK).4F框架内涵,其满足上述任务要求,消杀机器人作业安全评估流程则包含6个细分化步骤:评估计划制定、评估指标建立、评估方法选择、数据类型选择、测试对象选择、以及测试任务设定[20]。
(3) 消杀机器人消杀作业安全绩效测量评估方法主要将德菲尔专家法、HTA-T,WDA和AH相结合,对消杀任务进行层次分解及工作域判定[21],进而进行认知行为决策SRK。
(4) 消杀机器人作业安全交互设计4F原则[22],主要包含功能、色彩、造型以及界面设计4大层面。
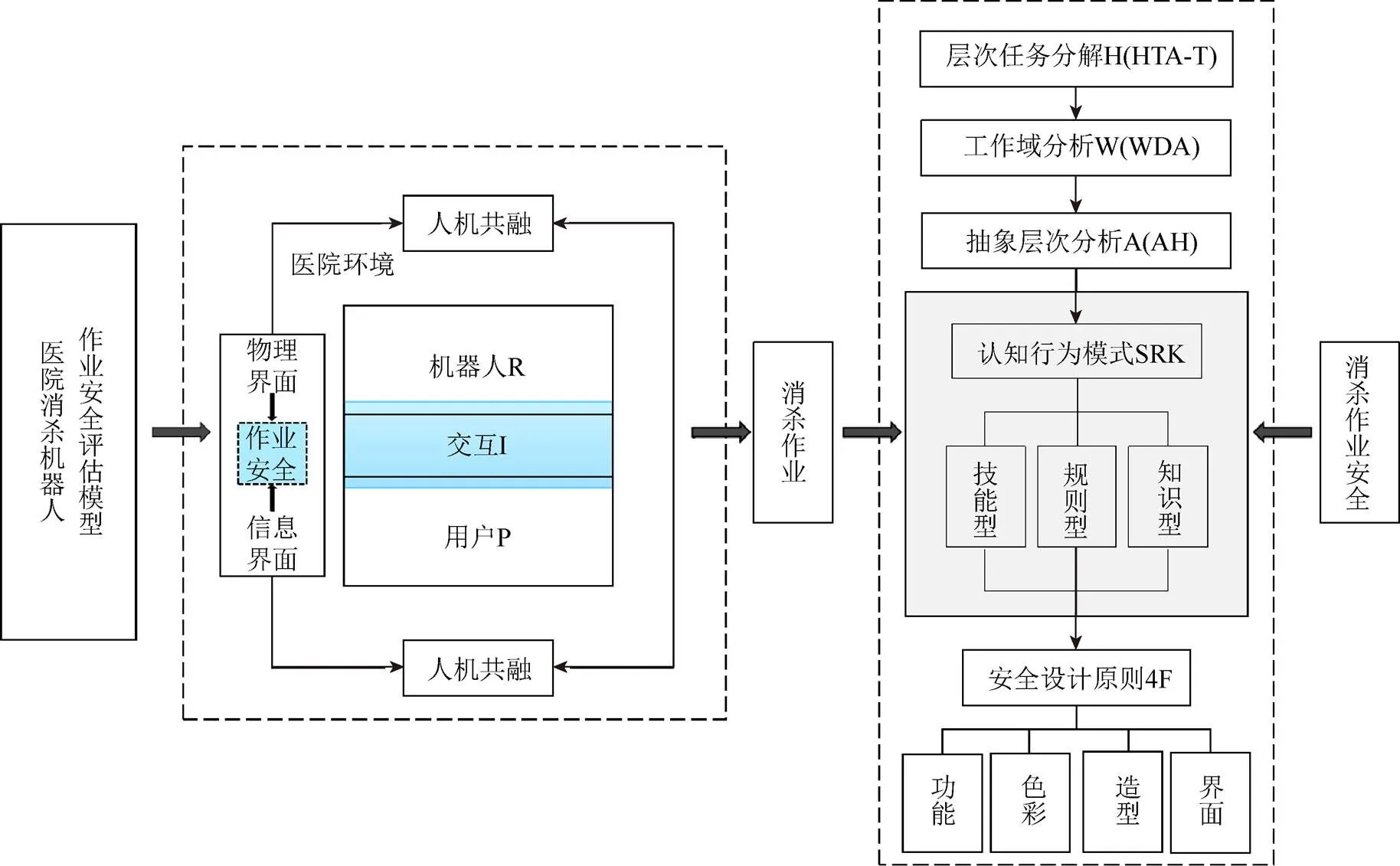
图4 消杀机器人作业安全评估模型理论框架
3.2 功能需求安全设计策略
如图5所示,医院消杀机器人功能需求安全设计策略如下:
(1) 消杀功能安全设计策略。医院消杀机器人主要消杀对象是医护人员和院内设施。针对术前准备工作、会诊后消毒及传染病诊疗后的清理;院内移动设备(如药品配送机器人)、静态仪器和病床及卫生间马桶等。除此消杀机器人还担负着医院空气环境的消毒重任。因此,只有正确识别消杀对象的结构轮廓、环境特点、医护人员体貌特征等因素[23],才能避免因识别障碍而产生的伤害或其他安全事故。
(2) 移动功能安全设计策略。消杀机器人在接收信号或识别消杀目标后,需要移动至目标点,移动过程中,若速度过快易造成倾倒等不安全隐患,同时不易躲避在移动过程中出现的障碍物;跟随移动功能要求移动速度要适应跟随设备的速度,适宜的速度可保持自身稳定,是保证作业安全的最基本要求[24]。
(3) 交互功能安全设计策略。与消杀机器人产生交互的用户有清洁人员、医护人员和病患及家属。清洁人员主要担任更换消毒液、为下一步工作选择合适作业模式的任务,参与指导完成工作;与医护人员的交互主要在于术前消毒和医护工具的消杀需求设定;消杀机器人与病患及家属虽不存在直接交互,但在进行病房内作业时,其直接进入工作状态会对用户产生恐惧心理[25],因此,进入病房前可进行简单交互提醒。由于不同人群对消杀机器人的接受程度不同,不同作业任务采取不同交互模式可提升作业任务完成效率。
(4) 识别功能安全设计策略。消杀机器人工作过程中应自动识别周围环境中威胁因素,并做出相应的决策判断。如是否需要躲避出现的障碍物,及躲避路径的规划,只有正确识别和规避风险才能提高作业安全性。

图5 消杀机器人功能分析
3.3 外观色彩安全设计策略
人类视觉感官对色彩具有敏感性,科学的色彩设计可提升工作安全性[26]。消杀机器人外观色彩与形态结构的融合统一,是提高作业安全的重要指标,可产生较大影响[27]。外观色彩设计要与造型相统一,根据安全原则进行设计,并遵守国家安全标准,运用色彩对比和面积变化达到反差效果;消杀机器人属于具有一定安全隐患的服务机器人,作业过程中需警告人们注意远离机身作业可及范围,因此采用黑白底色配合具有一定警示作用,将安全色应用于消杀机器人色彩设计,能够有效提高消杀作业安全性。
3.4 形态造型结构安全设计策略
消杀机器人是实现消毒功能的载体,合理的结构设计是安全性研究的主要内容,可以将安全隐患降至最低[28]。其造型设计应偏向沉稳,具有一定震慑力,利于杀菌消毒作业目标的完成。过于美的外观可能会使病患者感到亲切,导致因过分交互行为而造成危险事故;移动结构的设计应采用接触面积较大的造型,以增加摩擦力,降低消杀机器人在行动过程中倾倒的可能性;喷洒部位调节范围应符合医院设施及人体安全尺寸;对于医院消杀机器人外观形态美与丑的度的把握,是安全设计的重要因素,充分考虑病患的视觉、情感、交互认知,可达到人机系统最大化统一[29]。
3.5 交互界面安全设计策略
保证人与机器交互安全是医院消杀机器人研究的重要目标之一。由于不同用户对消杀机器人的接受程度和需求不同,若未及时进行交互模式切换,可能出现因消杀力度过大或消杀目标错误而产生安全事故。为有效避免人机共融安全隐患,将消杀机器人交互安全性设计策略归纳为:不同用户对其情感认知、交互界面的安全性设计、操作警示的安全性设计。
研究不同用户对消杀机器人的认知偏好,获取相关需求,进一步确定交互模式内容;交互界面设计要遵循版面简洁、功能指令清晰、转换方式便捷的原则,防止因复杂设置而出现误操作行为;在操作错误时,机器人应采取柔和清晰警示提醒,如基于人因视觉舒适度的闪烁指示灯提示、适宜听觉系统的温和语音提示。将交互安全设计理念贯穿于设计中,考虑人因系统的交互安全性设计指标,提高交互安全[30]。
4 结束语
本研究旨在探究医院消杀机器人作业安全与交互设计策略,构建医院消杀作业安全评估理论框架。首先利用HTA-T方法将消杀机器人作业任务分解,建立一套完整消杀作业流程,同时提出目标任务中危险因素的纠正原则;结合WDA描述消杀作业系统目的和消杀机器人可执行的功能,总结作业过程中支持决策的信息需求,以表明消杀机器人可自主执行任务;借鉴已有方法,得到消杀机器人完成消杀作业的安全认知模式,最终提出消杀机器人安全设计优化理论模型框架Ip-r(HWA-SRK).4F,建立基于功能、形态、色彩及交互界面设计要素的安全设计策略,为后续基础研究与实践应用提供参考依据。
[1] 赵银科. 机器人作业的安全及人机匹配[J]. 工业安全与防尘, 1996, 26(8): 10-12.
ZHAO Y K. Safety of robot operation and human-machine matching[J]. Industrial Safety and Environmental Protection, 1996, 26(8): 10-12 (in Chinese).
[2] 于化伟, 王艳廷, 李晓磊. 作业安全分析研究[J]. 安全与环境工程, 2008, 15(2): 116-118.
YU H W, WANG Y T, LI X L. Operational safety analysis and research[J]. Safety and Environmental Engineering, 2008, 15(2): 116-118 (in Chinese).
[3] 赵京, 张自强, 郑强, 等. 机器人安全性研究现状及发展趋势[J]. 北京航空航天大学学报, 2018, 44(7): 1347-1358.
ZHAO J, ZHANG Z Q, ZHENG Q, et al. Research status and development trend of robot safety[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(7): 1347-1358 (in Chinese).
[4] 李锡江, 刘荣, 张厚祥, 等. 基于模糊故障树法的清洗机器人安全性研究[J]. 北京航空航天大学学报, 2004, 49(4): 344-348.
LI X J, LIU R, ZHANG H X, et al. Fuzzy fault tree analysis on safety of robot for wall cleaning[J]. Journal of Beijing University of Aeronautics and Astronautics, 2004, 49(4): 344-348 (in Chinese).
[5] 黄志清, 李鼎鑫, 王庆文. 非平坦地形下移动机器人安全路径规划研究[J/OL]. 控制与决策: 1-9 [2021-11-15]. http://kns. cnki.net/kcms/detail/21.1124.TP.20210104.1513.025.html.
HUANG Z Q, LI D X, WANG Q W. Research on safe path planning of mobile robot inune-ven terra in[J/OL]. Control and Decision: 1-9 [2021-11-15]. http://kns.cnki.net/kcms/detail/21. 1124.TP.20210104.1513.025.html (in Chinese).
[6] 朱蓉军, 夏晶, 赵思远, 等. 钻锚机器人人机安全避碰方法[J]. 西安科技大学学报, 2020, 40(5): 823-830.
ZHU R J, XIA J, ZHAO S Y, et al. Human-robot safety collision avoidance method for drill-anchor robot[J]. Journal of Xi'an University of Science and Technology, 2020, 40(5): 823-830 (in Chinese).
[7] 杨占力, 万媛, 王洋, 等. 风电塔筒检测爬壁机器人设计与安全性分析[J]. 科学技术与工程, 2020, 20(15): 6113-6121.
YANG Z L, WAN Y, WANG Y, et al. Analysis of safety and stability of wall-climbing robot[J]. Science Technology and Engineering, 2020, 20(15): 6113-6121 (in Chinese).
[8] LI L B. Safety and risk assessment of civil aircraft during operation[M]. London: IntechOpen, 2020: 12-23.
[9] KANAZAWA A, KINUGAWA J, KOSUGE K. Adaptive motion planning for a collaborative robot based on prediction uncertainty to enhance human safety and work efficiency[J]. IEEE Transactions on Robotics, 2019, 35(4): 817-832.
[10] AOUDE G S, LUDERS B D, JOESPH J M, et al. Probabilistically safe motion planning to avoid dynamic obstacles with uncertain motion patterns[J]. Autonomous Robots, 2013, 35(1): 51-76.
[11] ZHENG G Z, ZHU N, TIAN Z, et al. Application of a trapezoidal fuzzy AHP method for work safety evaluation and early warning rating of hot and humid environments[J]. Safety Science, 2012, 50(2): 228-239.
[12] 陈农田, 王帅, 高文韬, 等. 基于层次任务分析理论的飞行员进近着陆操纵任务分析[J]. 民航学报, 2018, 2(6): 84-87.
CHEN N T, WANG S, GAO W T, et al. Pilot approaching and landing manipulating task analysis based on HTA theory[J]. Journal of Civil Aviation, 2018, 2(6): 84-87 (in Chinese).
[13] JOHN A, STANTON N A. Task analysis[M]. London: Taylor & Francis, 2000:1-8.
[14] KIRWAN B. A guide to practical human reliability assessment[M]. London: Taylor & Francis, 1994: 580: 49-78.
[15] STANTON N A, SALMON P M, WALIKER G H. Human factors methods: a practical guide for engineering and design[M]. Burlington: Academic Press, 2013: 73-77.
[16] RASMUSSEN J. Skills, rules, and knowledge; signals, signs, and symbols, and other distinctions in human performance models[J]. IEEE Transactions on Systems, Man, and Cybernetics, 1983, SMC-13(3): 257-266.
[17] 蒋英杰, 孙志强, 宫二玲, 等. 一种认知行为模式的概率化确定方法[J]. 计算技术与自动化, 2011, 30(1): 75-80.
JIANG Y J, SUN Z Q, GONG E L, et al. A probabilistic method to determine cognitive behavior mode[J]. Computing Technology and Automation, 2011, 30(1): 75-80 (in Chinese).
[18] 吴海彬, 杨剑鸣. 机器人在人机交互过程中的安全性研究进展[J]. 中国安全科学学报, 2011, 21(11): 79-86.
WU H B, YANG J M. Progress in robot safety research during human-robot interaction[J]. China Safety Science Journal, 2011, 21(11): 79-86 (in Chinese).
[19] 董玮, 詹庆东. 基于层次任务分析的社交网站信息构建评估: 以花瓣网为例[J]. 图书情报工作, 2012, 56(17): 98-103, 66.
DONG W, ZHAN Q D. Evaluation of social network sites information architecture using hierarchical task analysis— taking huaban website as an example[J]. Library and Information Service, 2012, 56(17): 98-103, 66 (in Chinese).
[20] 佟瑞鹏, 崔鹏程. 基于深度学习的不安全因素识别和交互分析[J]. 中国安全科学学报, 2017, 27(4): 49-54.
TONG R P, CUI P C. Unsafe factor recognition and interactive analysis based on deep learning[J]. China Safety Science Journal, 2017, 27(4): 49-54 (in Chinese).
[21] 龚时雨, 谭跃进. 工程系统一体化安全风险模型研究[J]. 中国安全科学学报, 2007, 17(2): 149-154, 2.
GONG S Y, TAN Y J. Research on integrated safety risk model for engineering system[J]. China Safety Science Journal: CSSJ, 2007, 17(2): 149-154, 2 (in Chinese).
[22] AL-HAKIM L, WANG M, XIAO J Q, et al. Hierarchical task analysis for identification of interrelationships between ergonomic, external disruption, and internal disruption in complex laparoscopic procedures[J]. Surgical Endoscopy, 2019, 33(11): 3673-3687.
[23] HOFFMAN R R, MILITELLO L G. Perspectives on cognitive task analysis: historical origins and modern communities of practice[M]. New York, Taylor & Francis, c2009: 35-46.
[24] 李君, 支锦亦, 李然, 等. 基于认知任务分析的智能系统交互设计路径研究[J]. 包装工程, 2020, 41(18): 29-37.
LI J, ZHI J Y, LI R, et al. Interactive design approach of intelligent system based on cognitive task analysis[J]. Packaging Engineering, 2020, 41(18): 29-37 (in Chinese).
[25] ZESTIC J, SANDERSON P, DAWSON J, et al. Defining information needs in neonatal resuscitation with work domain analysis[J]. Journal of Clinical Monitoring and Computing, 2021, 35(4): 689-710.
[26] 龚建伟, 陆际联, 高峻尧. 移动机器人失控的安全防范[J]. 机器人, 2003, 25(4): 300-303.
GONG J W, LU J L, GAO J Y. Safe-running area control for mobile robot[J]. Robot, 2003, 25(4): 300-303 (in Chinese).
[27] 刘立家, 胡建旺, 孙慧贤. 层次分析法中判断矩阵的调整方法[J]. 兵器装备工程学报, 2020, 41(2): 221-224.
LIU L J, HU J W, SUN H X. Adjustment method of comparison matrix in analytic hierarchy process[J]. Journal of Ordnance Equipment Engineering, 2020, 41(2): 221-224 (in Chinese).
[28] 冯玲. 基于PAD三维情感测量的分形图评价[J]. 泰山学院学报, 2014, 36(3): 47-51.
FENG L. The fractal images evaluation based on the there-dimensional PAD emotional measurement[J]. Journal of Taishan University, 2014, 36(3): 47-51 (in Chinese).
[29] 林鸿, 姚洋, 陈江. 设计安全发展综述研究[J]. 包装工程, 2020, 41(12): 9-15, 22.
LIN H, YAO Y, CHEN J. Development of design safety[J]. Packaging Engineering, 2020, 41(12): 9-15, 22 (in Chinese).
[30] REASON J T. Human error[M]. Cambridge: Cambridge University Press, 1990: 1-320.
Work safety and interaction design strategies of hospital disinfection robot
WANG Qiu-hui, WANG Ya-xin
(School of Mechanical Engineering, Tiangong University, Tianjin 300387, China)
Safety and design quality play a key role in enhancing the operation efficiency of “Human-Robot System” of hospital public environment disinfection robots. Based on ergonomics, interaction science, and cognitive science, explorations were conducted on the safety design and interaction strategies of the hospital disinfection robot. The hierarchical task method was employed and combined with the table task method (HTA-T) to construct the task flow of disinfection operation. The typical safety accidents in the operation process and causative logic were analyzed, thereby establishing an abstract model of disinfection tasks based on the work domain analysis (WDA) method. The SRK decision analysis method was utilized to judge the cognitive behavior pattern mode (skill-based, rule-based, or knowledge-based) of hospital disinfection robot operation, and to match the relationship of cognitive factors. The theoretical model framework of operation safety design evaluation for the disinfection robot was constructed, and the design strategies based on four safety indicators were proposed: functional requirements, morphological structure, appearance color, and human-robot interaction. The outcome can shed light on the basic theoretical research and design practice of human-robot ergonomics of hospital public environment disinfection robots.
hospital disinfection robot; operation safety; human-robot interaction; design strategies; evaluation model
18 May,2021;
TP 272;TP 242;X 931;TB 472
10.11996/JG.j.2095-302X.2022010172
A
2095-302X(2022)01-0172-09
2021-05-18;
2021-08-20
20 August,2021
王秋惠(1969–),女,教授,博士。主要研究方向为智能人因学SHRE、机器人人因工程HRE、人机交互和适老化设计。E-mail:wangqiuhui@126.com
WANG Qiu-hui (1969–), professor, Ph.D.Her main research interests cover smart human-robot ergonomics, robot ergonomics, human-robot interaction, design for the elderly. E-mail:wangqiuhui@126.com
