质子交换膜燃料电池过氧比鲁棒跟踪控制及仿真研究
2022-03-21侯荣福杨君王明杰于蓬
侯荣福,杨君,王明杰,于蓬
1.山东交通学院 汽车工程学院,山东 济南 250357;2.山东交通学院 机动车检测实验中心,山东 济南 250100;3. 山东济燃氢动力有限公司,山东 济南 271100
0 引言
燃油汽车的增加加剧了化石能源短缺,造成的环境污染也越来越严重,对人类社会的可持续发展产生了严重影响。质子交换膜燃料电池(proton exchange membrane fuel cells,PEMFC)以清洁、高效、稳定、能量密度高、工作温度低、使用寿命长等优点备受人们关注[1],因此PEMFC非常适合作为混合动力汽车和纯电动汽车的理想动力源[2]。
近来国内外学者围绕PEMFC过氧比控制进行了诸多研究。Gelfi等[3]建立了低速鼓风机低压供气系统模型,并对低压系统和装有高速压缩机的高压系统进行了动态分析比较;Pukrushpan等[4]基于阴阳极物料守恒方程建立了9阶状态模型,并对压缩机的动态特性进行了建模分析,该模型较为完整,适用于控制研究。王瑞敏[5]简化了Pukrushpan的半经验模型,建立了6阶状态模型,并设计了观测器估计重构了相关的状态变量,提高了系统的瞬态响应。贺建军等[6]提出了燃料电池空气供气系统的简化模型,通过试验验证,所建立的模型相对误差小于5%。Liu等[7]基于2阶滑模算法,通过扩展观测器获取过氧比信息,设计了空气供给量的控制算法,试验验证设计的控制器具有鲁棒性。孙业祺等[8]采用比例积分微分(proportional integral differential,PID)控制器分别对阴极空气流量和空气压力进行控制。卫国爱[9]针对PEMFC空气供给子系统,建立了阴极空气流量和空气压力的预测模型,并采用解耦方法,对阴极空气流量和空气压力解耦控制。孙涛等[10]针对空气压缩机对燃料电池供电的自适应系统,设计了由前馈控制和反馈控制结合的控制器,并进行了仿真验证,控制器能够有效避免“氧饥饿”现象的产生。张天贺[11]设计了自适应模糊PID控制器,模糊控制器作为提供压力信息的前馈控制,PID控制器作为控制供气管道气体压力的反馈控制器,实现对气体压力的优化控制。Gruber等[12]设计了分级控制器,主控制器为非线性预测控制器,用于计算空气流量的必要参考值,以获取过氧比;从属控制器为PI控制器,用于操纵压缩机电压以获取目标空气流量。
解决PEMFC空气供应系统的控制问题,首先应建立空气供应系统的仿真模型,前期的研究对PEMFC空气供应系统模型描述较为精确,但是模型求解复杂,不利于控制器的设计。本文中针对PEMFC空气供应系统的过氧比跟踪控制,建立面向控制的3阶简化模型,在此基础上利用反馈线性化方法设计控制器并通过李雅普诺夫方法验证控制器的稳定性,利用Matlab/Simulink仿真平台对存在一定扰动的4种工况进行仿真试验,验证控制策略的有效性。
1 PEMFC空气供应系统建模
PEMFC空气供应系统一般由空气压缩机、空气供应管路、电堆阴极、回流管、背压阀等装置组成[13],系统结构如图1所示。
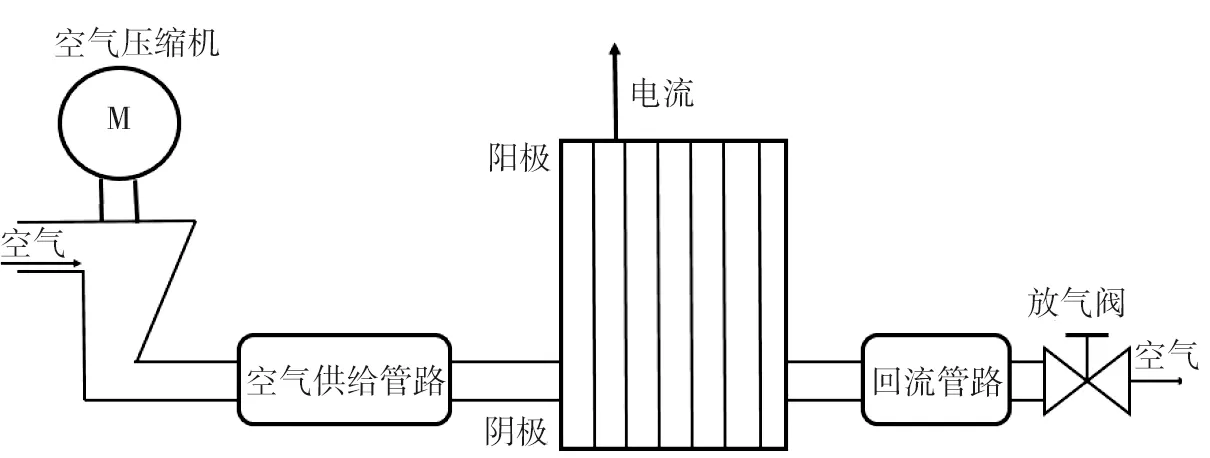
图1 PEMFC空气供应系统结构
为了便于计算,本文中对该系统模型进行了简化,分别对空气供应管道、电堆阴极和空气压缩机进行建模。
1.1 空气压缩机模型
根据空气压缩机的转速和负载转矩,可以得到空气压缩机动态模型。
压缩机的电机转矩
τcm=ηcmkt(Ucm-kvωcp)/Rcm,
(1)
式中:ηcm为电机机械效率;kt为电机常数;Rcm为电机电阻,Ω;Ucm为电动机的控制电压,V;kv为反电动势常数,V/(rad·s-1);ωcp为电机转速,rad/s。
空气压缩机的质量流量[14]
qm,cp=Vcprηvcρaωcp/(2π),
(2)
式中:ηvc为容积效率;Vcpr为压缩机容积,m3;ρa为空气密度,kg/m3。
压缩机的负载转矩
(3)
式中:Cp为空气的比热容,常温下Cp=1004 J /(kg·K);Tatm为大气温度,K;ηcp为空气压缩机效率;psm为空气供应管道压力,Pa;patm为大气压力,Pa;γ为空气的热比率系数。
空气压缩机转速的动态特性方程为:
(4)
式中:Jcp为空气压缩机的转动惯量,kg·m2。
1.2 空气供应管道模型
空气供应管道连接空气压缩机和电堆阴极,根据空气热力学、理想气体守恒定律及能量守恒定律,空气供应管路压力psm的状态表达式为:
(5)

1.3 电堆阴极气体压力模型
由于阴极气体压力与大气压之间的压差很大,离开电堆阴极的空气质量流量由线性喷嘴方程决定
(6)
式中:CD为回流管道中背压阀的阀门常数;AT为回流管中背压阀的阀门面积,m2;Tst为电堆内部温度,K;θ为回流管中背压阀的阀门开度,此处θ=1。
由理想气体的状态方程和能量、质量守恒定律,可以得到阴极内部氧气和氮气的压力表达式:
(7)
(8)

为了便于模型建立,面向控制,对所建立的模型提出下列假设:1)所有气体都满足理想气体定律;2)进入供应管道的气体为标准大气压下的空气;3)空气供应管道内气体温度与电堆阴极气体温度相同;4)只考虑空气中的氧气和氮气,饱和水蒸汽气压视为常值;同时电堆阴极内应满足:
MNpN+MOpO+Mvpsat=kpca
(9)
式中:k为经验参数,k=0.025 85。
基于文献[15~17],综合式(1)~(9)和所提出的假设条件,定义状态变量
控制输入u=vcm,建立空气供给系统的状态空间表达式
(10)
式中:x1={ωcp};x2={psm};x3={pca};ci(i=1,…13)为常数;d为可测量的电流干扰,A。
定义PEMFC的过氧比为进入阴极的氧气质量流量qm,O,in与阴极消耗的氧气质量流量qm,O, react之比,过氧比
(11)
式中:c14和c15为常数,d=Ist。
2 非线性鲁棒控制器设计
PEMFC在运行过程中存在的主要问题之一是“氧饥饿”,即当负载电流突然变化时,阴极侧的耗氧率迅速增加,而氧气得不到及时补充,导致阴极出现“氧饥饿”现象,严重时会烧蚀质子交换膜。但是,阴极侧供氧不能超过一定限值,过量供氧不仅不会增加电堆输出电压,反而增加空压机消耗的功率,从而降低整个电堆净输出功率。根据Talj等[18]、Deng等[19]的研究,为了使燃料电池能够在不同条件下稳定运行,应使过氧比期望值λOref=2,以避免缺氧,同时燃料电池工作性能良好。
2.1 定义
假设一个状态方程[20]
(12)
式中:A为系统矩阵,X为系统状态变量。

2.2 引理

2.3 定理
对于空气供应系统设计的动态模型(10),设计控制输入
(13)

(14)
控制率u可以使系统状态能够跟踪到给定参考λOref邻域内,且保证该闭环控制系统的所有信号均有界。
2.4 证明
定义李雅普诺夫函数
V1=y2/2。
(15)
定义
(16)

由式(14)(15)可得:
(17)
将式(16)代入式(17)可得
(18)
由引理可知:y→0时λO→λOref,即过氧比可以跟踪到λOref邻域内,且整个闭环系统是李雅普诺夫稳定的。
定义李雅普诺夫函数
V2=V1+e2/2。
(19)
定义跟踪误差
(20)
由式(10)(16)可得
(21)

由式(17)(19)可得
(22)
由(13)(17)(21)可得
(23)

图2 控制结构图
3 仿真研究
在Matlab/Simulink仿真平台,根据式(10)(11)(13)(14)搭建PEMFC空气供给系统的仿真模型,验证该控制器的有效性。
选择4种不同工况进行数值仿真:1)工况1,燃料电池稳定运行,负载电流为150 A;2)工况2,负载电流以斜坡函数方式跳变,初始电流为120 A,斜率为5;3)工况3,负载电流以正弦函数的形式给出,幅值为100~200 A;4)工况4,负载电流以随机信号形式给出,跳变范围为120~180 A。仿真结果如图3所示。
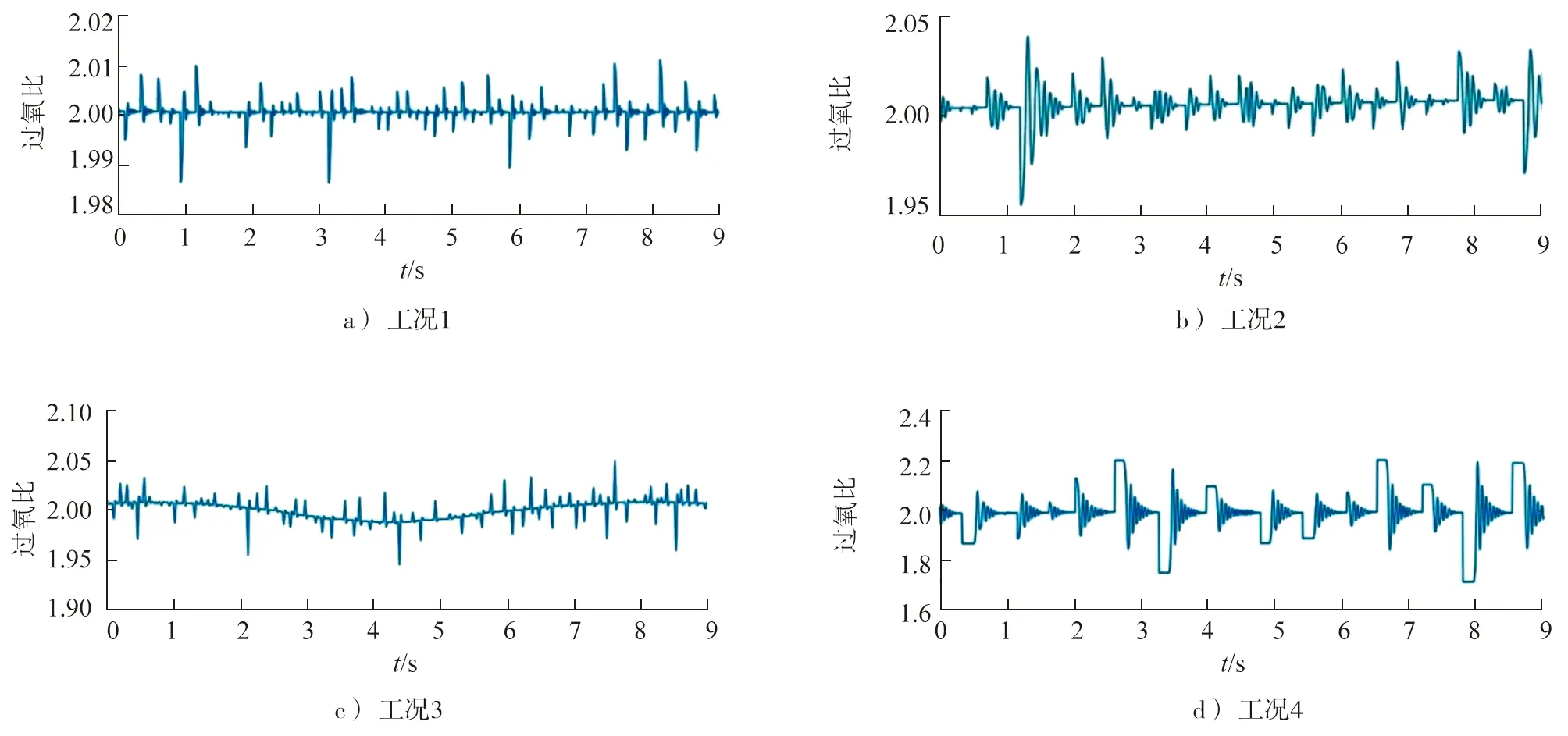
图3 不同工况下数值仿真结果
由图3可知:在4种工况下,负载电流发生变化时,所设计的控制器能够在极短的时间内将过氧比调节到期望值附近,且始终满足过氧比大于1,保证阴极无“氧饥饿”现象出现;当燃料电池以一定负载电流稳定运行时,控制器可以保证阴极过氧比保持在2左右,且相对误差不超过2%;负载电流以不同形式变化时,控制器能够调节阴极进气量,满足负载需求,同时过氧比较好地控制在期望值附近,相对误差较小,控制效果较好,与理论相吻合。
4 结语
为解决PEMFC运行过程中由于负载电流突变产生的“氧饥饿”现象,基于李雅普诺夫方法设计了过氧比鲁棒跟踪控制器;通过数值仿真验证了控制器在4种工况下的有效性,负载电流以不同形式变化时,控制器可以调节阴极进气量,过氧比较好地控制在期望值附近,相对误差较小,该鲁棒控制器可以有效抑制负载电流扰动对过氧比跟踪精度的影响,提高过氧比的跟踪控制精度。
