星载天线反射器形面主动控制研究现状与展望
2022-03-19宋祥帅谭述君高飞雄吴志刚
宋祥帅,谭述君 ,高飞雄,吴志刚,2
(1.大连理工大学 工业装备结构分析国家重点实验室,大连116024;2. 中山大学 航空航天学院,深圳 518107)
0 引言
星载天线是卫星系统不可缺少的有效载荷,相当于卫星系统的“眼睛”和“耳朵”[1]。近年来,航天科技高速发展,远距离微波遥感领域、深空探测领域、军事侦查以及通信领域对天线的增益和工作频率提出了越来越高的要求,大口径、高精度成为星载天线的主要发展方向。
当天线口径和工作频率一定时,反射器形面精度是影响天线增益的主要因素[2]。通常要求天线增益损失小于0.3 db,反射器形面精度要小于工作波长的五十分之一[3]。天线工作频率越高,对形面精度要求也就越高。因此,为了实现天线的高增益,反射器必须具有非常高的形面精度。星载天线反射器受多方面因素的影响而产生形面误差,从而导致形面精度下降。一方面,反射器设计和制造会产生一定的形面误差;另一方面,反射器在轨运行的空间热辐射载荷、太阳光压、地球非球形摄动力、各种电磁干扰力以及航天器变轨姿态调整时的牵引惯性力等会产生形面误差[4]。针对上述形面误差,目前通常采用优化结构设计、改善加工工艺、增加结构刚度和地面预补偿等被动措施予以尽可能减少[5]。Lang等[6]通过轨道热仿真优化设计了碳纤维蜂窝结构固体反射面天线反射器以满足Q/V波段的形面精度要求。Fang等[7]分析了制造过程中模具与反射器材料热膨胀系数不匹配所产生的制造误差,并对反射器结构参数进行了优化设计。被动措施具有结构简单、容易实现和不消耗能量等优点,但需要精确的轨道热分析技术和建模技术。此外,研究表明仅依靠被动措施难以有效地消除天线反射器在轨误差,不能保证反射器的精度和尺寸稳定性,从而导致天线的增益下降,尤其是针对大口径天线,结构阻尼小、趋于柔性更不利于形面保持。反射器形面主动控制技术利用传感器测量形面误差为控制器提供输入,控制器计算最优输出,并通过作动器驱动反射器结构变形以减少形面误差。对于星载天线,测量技术需要自动实时获取当前形面误差,为控制器提供输入,因此测量精度直接影响控制效果,同时也是判断当前形面是否满足形面精度的依据。作动器是实时反射器结构变形的主动执行机构,其定位精度影响控制器设计的难度。显然,引入主动控制技术增加了天线系统的复杂度和质量,但其能够保证天线反射器的在轨形面精度,为提高天线的总体性能指标,实现高频率天线提供了有效途径,是星载天线发展需要着重突破的关键技术之一。
综上所述,详细介绍了天线反射器形面主动控制相关研究工作进展。首先介绍了星载天线反射器形面主动控制主要的结构方案;然后分别对作动器技术、形面主动控制方法、高精度形面变形测量技术和形面主动控制实验系统进行了详细的调研论述;最后提出了在轨形面主动控制的关键技术,并对其发展进行了展望。
1 反射器形面主动控制方案
反射面天线是各种应用卫星上使用最多的一类天线形式,已发展出多种类型。根据反射面类型的不同,可分为4类:固体反射面天线、索网反射面天线、壳膜反射面天线和薄膜反射面天线[8]。针对不同类型的星载天线,国内外研究机构和高校开展了形面主动控制的探索性研究工作,根据作动器的驱动位置不同,形面主动控制方案可分为:直接反射面控制、支撑框架控制以及边界拉索控制,具体可查看文献[5]。本文将针对不同类型星载天线的结构特性,详细地对其差异性和优缺点进行阐述。
1)固体反射面天线
固体反射面天线一般为碳纤维复合材料蜂窝夹层结构或者薄壳结构,具有高刚性特性。这种高刚性特性需要大推力作动器对反射面直接进行调整,其作动方式主要有两种:垂直作动方式和面内作动方式。垂直作动方式是将作动器垂直安装在反射器的背部,通过作动器的伸长或缩短驱动反射面变形,如图1所示[9-10]。垂直作动方式能够产生较大局部变形且变形直观,主要应用于重构反射器形面的研究,其劣势主要在于作动器需要刚性基底支撑,采用这种控制方式将额外增加天线结构质量。
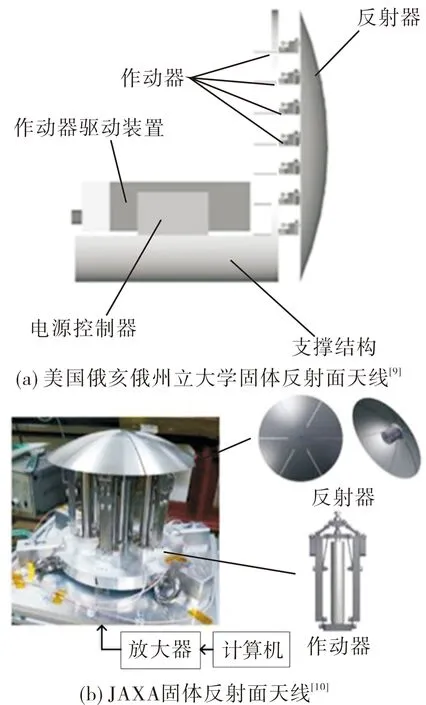
图1 垂直作动方式驱动固体反射面天线Fig.1 Solid antennas driven by a vertical actuation mode
面内作动方式则是将作动器黏贴在反射器背部或安装在背部加强筋内以驱动反射面变形,如图2所示[11-12]。面内作动方式工作原理为安装的作动器偏离反射面的中性轴,作动器产生的面内应变导致反射面整体的面外弯曲变形。此种作动方式能够产生较大的面外变形,且不需要刚性基底,有效地解决了垂直作动方式所导致的天线结构质量增加问题。
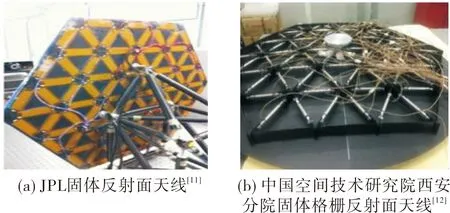
图2 面内作动方式驱动固体反射面天线Fig.2 Solid antennas driven by an in-plane actuation mode
2)索网反射面天线
索网反射面天线主要由拉索结构和可展开支撑结构组成,其中拉索结构由上、下索网和中间竖向拉索组成。索网反射面天线通过对拉索施加预紧力张拉成形,并利用支撑结构保证反射器整体刚度。目前索网反射面已发展多种类型,其中周边桁架索网天线和径向肋索网天线是最常用的两种结构形式。由于索网反射面天线的结构特性,研究人员提出将中间拉索可安装作动器,通过垂直作动直接调整反射面的变形,如图3所示[13-14]。此种方案能够实现反射面的精确变形控制,但如何安装作动器是工程上亟待解决的难题之一。索网反射面天线结构比较复杂,作动器布线比较困难,易与周边结构发生钩挂和缠绕。

图3 垂直作动方式驱动索网反射面天线Fig.3 Cable-mesh antennas driven by a vertical actuation mode
3)壳膜反射面天线
壳膜反射面天线由Datashvili研制的壳膜材料制造,它具有足够的刚度,能够保持自身稳定的抛物面形面,其刚度介于固体反射面天线和索网反射面天线之间。因此,壳膜反射面天线的形面控制方案与固体反射面天线类似,主要采用直接反射面控制方案,如图4所示[15-16]。

图4 垂直作动方式驱动壳膜反射面天线Fig.4 Shell-membrane antennas driven by a vertical actuation mode
4)薄膜反射面天线
薄膜反射面天线主要由支撑框架控制、边界拉索和膜面3部分组成。支撑框架是薄膜反射面天线的支撑结构,也是最主要承力构件。边界拉索与膜面相连,提供张拉预紧力,确保膜面刚度。薄膜反射面天线刚度低,膜面易发生褶皱。根据薄膜反射面天线的结构特性,通常采用支撑框架控制、边界拉索控制和直接反射面控制3种控制方案。支撑框架控制是驱动框架变形以减少由框架弯曲和扭转引起的形面误差,如图5(a)所示。NASA利用宏纤维复合材料(macro fiber composites,MFC)控制充气支撑框架[17]。边界拉索控制是通过调整拉索的拉力以减少薄膜拉力不均引起的膜面褶皱和凸起,图5(b)为浙江大学利用电机和丝杆设计的张拉系统控制充气薄膜反射面天线[18]。支撑框架控制和边界拉索控制属于间接膜面调整,其可控范围大,但控制精度较差。为了实现精确的膜面变形控制,需要设计超轻质量和高定位精度的作动器,并采用直接膜面控制方案。此外,反射器需要嵌入数目众多的作动器,这增加了控制系统的复杂度、重量以及成本。图5(c)为美国Honeywell公司设计智能作动器和传感器并埋入薄膜内部,以控制其形面变形[19]。图5(d)为JPL利用168个聚偏二氟乙烯(polyvinylidene difluoride,PVDF)作动器结合面内作动方式直接控制膜面[20]。

图5 薄膜反射面天线控制方案Fig.5 Shape control scheme of membrane antennas
综上所述,直接膜面控制适用于所有类型反射面天线的精确变形控制,但同时也需要数目众多的作动器,这增加了控制系统的复杂度、重量和成本。支撑框架控制与拉索控制方案只适用于薄膜反射面天线,且对高精度反射面的调整相对较弱。
2 作动器技术
作动器是驱动反射器结构变形的主动执行机构,是反射器形面主动控制系统的重要组成部分。目前结构变形与振动控制所采用的作动器主要有:压电作动器、形状记忆合金作动器、磁致伸缩作动器和机电作动器等。表1中详细列出了各种类型作动器工作原理、功耗以及优缺点[21-23],其中压电作动器具有响应速度快、定位精度高、功耗低以及线性度好等优势,在星载天线反射器形面主动控制中得到广泛研究。目前压电作动器主要包括:PZT、MFC和PVDF。压电作动器行程小,大幅运动易饱和,没有放大机构压电作动器可输出几百μm量级的位移。但国外研究证实对于在轨光学载荷的超精密控制,100 μm的作动输出位移可以满足要求。对于需要大输出位移的重构反射器形面则需要设计运动放大机构,如PI公司开发的压电作动器可以实现毫米级位移[24]。此外,压电作动器需要高压电源驱动,这是限制压电作动器空间应用的一个因素。

表1 各种类型的作动器对比
3 形面主动控制方法
星载天线最主要的设计指标之一是天线的增益。根据式(1)的Ruze方程[2]可以看出,当天线口径一定时,天线主瓣增益损失由半光程差的均方根值决定。
(1)
式(1)中,η为增益损失系数;G0为无形面误差的天线增益;G为天线实际增益;λ为天线工作波长;Δerms为反射面各离散点半光程差的均方根(root mean square,RMS)值。
根据图6光程与变形形面的几何关系[25],半光程差如式(2)所示:
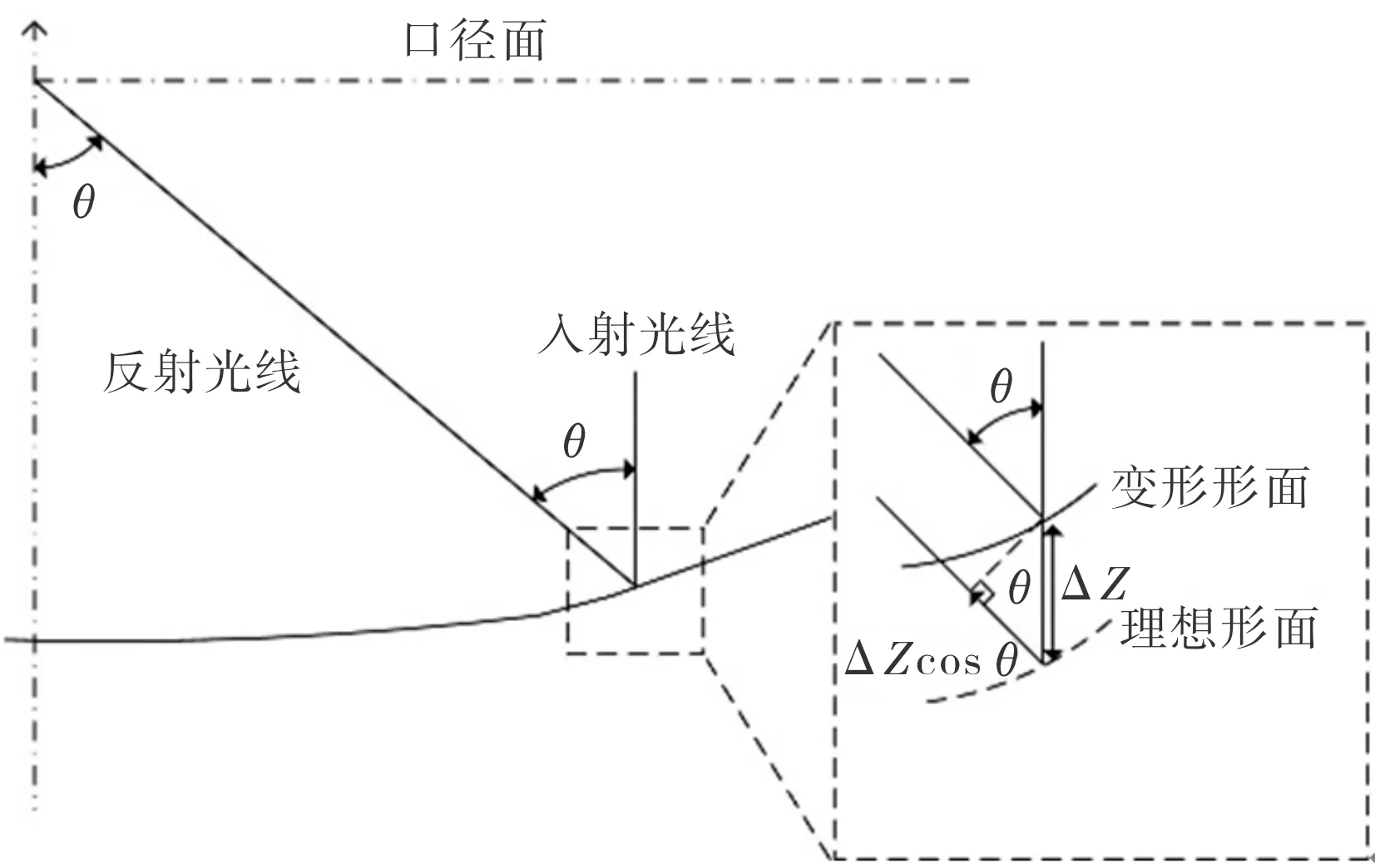
图6 光程与变形面的几何关系[25]Fig.6 Geometric relationship between optical path and deformed surface
(2)
式(2)中,θ为入射光线与反射光线的夹角;Δz为反射面各离散点的面外位移。
从式(2)可以看出,半光程差随着面外位移变化而变化,为了简化计算,工程上通常采用面外位移的RMS值来表示反射器的形面精度。天线反射器的形面主动控制是通过作动器驱动反射器结构变形以补偿变形面与理想抛物面之间的误差,本质上是求解最优控制律的优化问题。因此形面主动控制方法涉及优化性能指标、约束条件、自变量以及求解算法。本节将根据求解过程中有无当前形面信息反馈,将形面主动控制方法分为两大类:开环控制方法和闭环控制方法。
1)开环控制方法
以RMS误差作为评价准则应用最广泛的方法是最小二乘(least-squares,LS)法。该方法利用影响系数矩阵(influence coefficient matrix,ICM)模型描述作动器输入电压与反射器面外位移的关系,建立如式(3)所示的最优控制模型并利用LS求解。
(3)
其中,V为作动器电压向量;Bv为影响系数矩阵;zd为期望变形位移向量。
利用LS法,Hill等[26]控制充气薄膜反射面天线的W误差;Belvin等[27]提出一种准静态形面控制方法以控制15 m口径环柱索网反射面天线的形面误差;Lan等[12]控制1 m口径碳纤维复合材料的(carbon fiber reinforced plastic,CFRP)格栅反射器。Wu等[28-29]利用PZT压电作动器和MFC压电作动器控制格栅反射器的高阶误差;Lu等[30]控制0.2 m口径的薄膜反射镜的形面误差;Datashvili等[15]控制壳膜反射器实现期望的面外变形。Yoon等[31]提出了一种无约束的形面主动控制方法,该方法能够找到作动器的最优控制输入。Wang等[32]建立了PZT压电作动器和索网反射面天线的有限元模型,采用无约束解析法和两种有约束优化模型求解达到期望位移的最优控制率。另外,对于星载天线,控制能量消耗也需要额外关注。Desmidt等[33]通过加权的方式以RMS误差和作动器电压平方和最小为目标建立最优控制模型,利用LS法求解作动器的最优控制输入。隋允康等[34]以作动器耗能和形面误差最小为综合目标建立最优控制模型,并将其转化为二次规划问题进行求解。
根据式(2)可以看出,半光程差不仅仅与离散点的面外位移有关,还与离散点在反射面的几何位置有关。因此,工程上描述形面精度所采用的RMS误差可能无法精细预测天线增益的损失。国内外研究人员进一步将天线电磁性能引入到最优控制模型。连培园等[35-36]以增益损失和第一副瓣抬升最小为综合控制目标,建立最优控制模型求解作动器的最优电压,并与以最小RMS误差为目标的控制方法进行了对比。研究表明形面精度与增益的变化规律基本一致,但无法精细预测增益损失。Tanaka[25]根据反射器形面变形引起天线增益的改变,提出了一种形面误差估计和形面主动控制方法。Zhang等[37-38]利用近似方法并结合天线电磁性能对结构变形的灵敏度分析,研究了索网反射面天线的结构-电磁一体化形面控制。Yoon等[39]以实际增益与期望增益偏差最小建立惩罚函数,求解最优控制输入。Padula等[40]以作动器最大改变长度最小为目标,以天线增益和形面精度作为约束条件,求解作动器的最优控制输入。Wang等[41]以天线增益和控制能量最小为目标建立最优控制模型,采用序列二次规划法进行求解。
2)闭环控制方法
开环控制方法能够提高反射器形面精度,改善天线的电性能。但开环控制没有信息反馈,难以保证控制系统的抗干扰能力、稳定性和控制精度。闭环控制方法具有对模型误差不敏感性,较好鲁棒性和抗干扰性,是实现高精度形面的更有效方法。Bradford等[11]提出了基于LS法的闭环形面主动控制方法。该方法通过形面误差反馈逐步迭代寻找最优控制律。Tabata等[42]针对索网反射面天线的非线性系统,利用迭代过程中修改ICM模型并结合LS法以实现高精度形面控制,但此方法需要根据形面的变化不断重新计算ICM。Haber等[43]针对可变形薄膜反射镜提出了一种基于线性模型的迭代学习算法。Zhu等[44]利用Zernike多项式系数和控制电压平方之间的影响函数设计闭环控制器以控制光学镜的波前误差。智能优化算法,例如遗传算法(genetic algorithm,GA)和粒子群算法(particle swarm optimization, PSO),因其具有很好的全局寻优能力、不需要对目标函数求导和对搜索空间要求低等优势[45],在天线反射器形面主动控制得到广泛研究。Xu和Luo[46]以形面误差和作动器的改变长度最小为目标建立优化模型,利用多目标的GA算法求解最优控制输入。许睿[47]利用GA算法和局部搜索算法,提出了一种混合优化算法以消除薄膜结构的褶皱。Shao等[16]基于PSO优化算法提出了迭代算法以寻找最优控制律。智能优化算法能够找到一个较好的解,但可能需要较多的迭代次数。另外,针对质量轻的超大口径天线,由于结构阻尼小、刚度低,形面主动控制过程作动器加载引起的结构瞬态响应和残余振动不可忽略。Xie等[48]利用增益规划控制方法研究了索网反射面天线的动态形面控制问题。Shan等[49]设计了模糊控制器以控制空间薄膜结构的形面。
本文作者团队也开展了闭环形面主动控制方法的研究工作。针对固体格栅反射器,利用ICM和LS的闭环控制方法以解决传统开环控制方法难以处理模型不确定性的问题[50]。并针对控制系统存在较大模型不确定性,LS闭环控制法难以收敛的问题,提出了一种基于反馈误差学习(FEL)在线更新模型的自适应控制方法[51]。该方法以影响系数矩阵广义逆模型为基础,通过形面误差和学习率在线辨识反射器系统逆模型,在此逆模型基础上自适应更新控制律,有效地避免了反射器系统模型误差对控制精度的影响。以集成30个PZT压电作动器口径0.65 m的平面六边形格栅反射器为研究对象,设计了实验工况以验证控制精度。图7给出了RMS误差随时间变化曲线,可以看出启动形面主动控制之后,反射器形面很快收敛到目标形面;当施加外载荷干扰导致形面RMS误差增大时,FEL控制方法也随之发挥作用再次控制反射器达到目标形面,显示该方法能够自适应控制反射器,实现较高的形面精度。针对大口径天线形面主动控制作动器加载过程导致的残余振动问题,课题组还提出了一种基于改进的快速模型预测控制 (IFMPC)的形面主动控制方法[14],并以10 m口径伞状索网反射面天线为研究对象,验证了所提IFMPC方法的有效性。研究表明IFMPC法可显著降低形状控制过程中的残余振动,控制过程更平滑。另外,针对嵌入大量作动单元的大口径天线,其集中式控制容错性差、采样与计算能力有限问题,课题组借鉴“分而治之”的思想,提出了基于动态子结构技术的多层级分布式模型预测控制方法[52]。该方法能有效减小天线形面误差,各子控制器能在不同层级上灵活设计,局部若干子控制器的失效不会导致整个控制系统突然瘫痪,具有良好的灵活性与容错性。
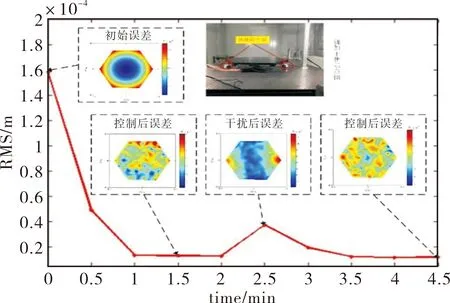
图7 RMS误差随时间变化曲线Fig.7 RMS error varies with the time
4 高精度形面变形测量技术
反射器形面测量为实施形面主动控制提供反馈信息,如何实现高精度测量尤为重要。目前,反射器的形面测量有多种方式,如激光干涉测量[11]、激光扫描测量[53]、光纤测量[54]、单目摄影测量[55]、双目或多目摄影测量[50]和经纬仪测量[56]等。Bradford等[11]利用ZYGO干涉仪测量口径1 m的碳纤维复合材料固体反射器。ZYGO干涉仪利用菲索干涉原理测量形面变形,具有超高的测量精度(测量精度可达到纳米级),但测量范围小(口径1 m以下)、成本高、装置重,且光学干涉测量对外部温度和振动环境敏感,需要配置光学平台(气浮台)。贺燕等[53]利用激光雷达扫描仪测量索网反射面天线的形面。激光雷达扫描仪利用激光扫描,通过干涉原理测量反射面到激光发射器的距离,配合光束的角度信息建立坐标系,进而得到三维坐标。激光雷达扫描仪测量范围大(测量口径能达到几十m),但测量精度较低(精度可达到亚毫米级),由于需要机械转台带动激光发射器旋转扫描,测量大口径天线全场检测速度较慢。Philen和Wang[54]利用光纤测量测量口径0.305 m的半圆形固体反射面实验模型。光纤传感器可以埋入反射器内部或黏贴在反射器表面,利用光纤变形后波长改变的原理测量应变,再计算出变形。因此光纤传感器并不适用索网反射面天线的形面变形检测。光纤传感器具有测量精度较高(测量精度可到达微米级)、抗电磁干扰和耐高温等特性,这些特性使其在空间应用具有优势,但由于光纤细且材料柔性差,易断裂,且测量范围小,形面变形测量需要大量布置。Lan等[55]利用单目摄影测量仪测量口径1 m的固体反射面天线。单目摄影测量仪通过多张不同角度的图像,利用三角交汇法得到离散点三维坐标。单目摄影测量仪的测量精度较高(1 m口径可达到十几μm)、测量范围大(口径100 m以内)和抗电磁干扰等特性,但测量前需要对相机的畸变系数进行标定、测量时需要移动相机从多个角度拍摄反射器图像以及需要在反射器表面粘贴标志点或者利用激光点阵。此外该测量仪不抗强光干扰、不耐高低温,空间应用需要设计相机热防护装置。双目或多目摄影测量的原理与单目摄影测量一致,具有与单目摄影测量相同的优缺点。增加相机数量主要解决了单目摄影测量需要多个角度拍摄反射器图像问题,自动化程度高,但由于相机畸变的影响,增加相机数量也会使得测量精度略有下降。经纬仪测量是利用一台经纬仪发射光束在反射面形成光斑,然后根据前方交汇原理,再利用另一台经纬仪观测光斑测量角度,从而实现对反射面的测量。经纬仪测量精度低,自动化程度低且装置重,经纬仪的主要误差来源为对中误差(0.1 mm)、中心高度偏差(0.05 mm)、视觉误差和指标差等。表2总结了各种测量方式的优缺点[47],从表2中可以看出,双目摄影测量仪在成本、装置重量和自动化程度等方面具有独特优势,适合反射器的形面变形测量,并已经得到广泛的研究与应用。Steeves等[57]利用数字图像相关(digital image correlation,DIC)摄影测量仪测量0.15 m口径反射器实验模型,测量系统的分辨率可达到4 μm。柏宏武等[58]研究了透过真空罐的光学窗口对天线进行真空高低温变形测量。王勇等[59]测量了1 m口径CFRP固体反射面天线,并与三坐标机测量结果进行了对比。
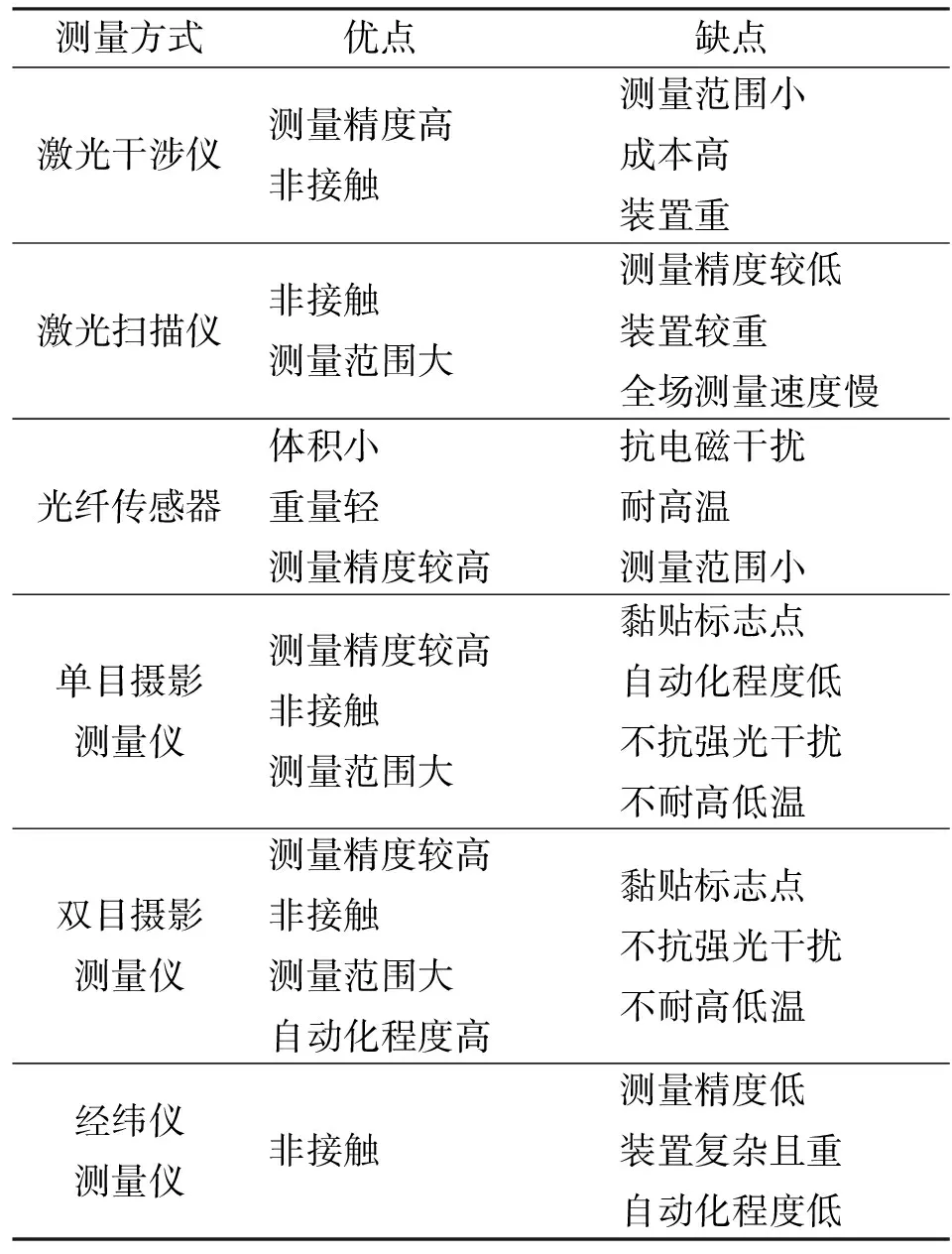
表2 各种形面测量技术的对比[47]
天线反射器暴露在真空高低温环境下,不间断遭受空间热源辐射和空间低温环境的交替加热和冷却,需要测量仪在此环境下仍具有高测量精度、良好稳定性及可靠性。国内外科研机构设计了相机防护装置,并验证了此环境下应用摄影测量技术的可行性。文献[60]详细叙述了近20年来国内外研究机构利用摄影测量技术的航天器变形测量试验研究,其主要机构包括国外的美国NASA[61-64]、欧洲ESA[65]、日本JAXA[66];国内的中国空间研究院西安分院[67]、北京卫星环境工程研究所[68]、解放军信息工程大学[69]以及郑州辰维科技有限公司[70]等。值得一提的是,2017年美国空军研究实验室(air force research laboratory,AFRL)联合NASA在国际空间站(international space station,ISS)利用双目摄影测量技术测量太阳能帆板振动信息,如图8所示[71-72],并基于测量数据进行了模态参数辨识,其辨识结果与加速度传感器辨识结果吻合,这是目前有报道的唯一太空应用案例。相对于天线反射器的变形测量,模态参数的辨识对测量精度的要求可能并不高。太空环境下实现反射器高精度的摄影测量仍需解决以下关键问题,如高低温环境下相机畸变的修正、强光环境下标志点的检测与高精度定位以及适合真空高低温环境的标志点等[60, 73]。

图8 利用双目摄影测量技术测量空间太阳能帆板[71-72]Fig.8 Space solar panels are measured using binocular photogrammetry technology
5 形面主动控制实验系统
天线反射器形面主动控制实验是验证控制方法可行性、可靠性和稳定性的重要手段,是研制星载天线不可缺少的环节。反射器形面主动控制实验系统主要由反射器、作动器、高精度测量传感器和控制器四部分组成。高精度形面传感器应具有高精度实时测量形面变形的能力,并将数据传输到控制器;控制器解算最优控制律,将指令信号发送到作动器;作动器提供驱动力以实现反射器的形面主动控制。
目前对于反射器形面主动控制实验系统的研究还处于控制方法可行性和反射器结构控制方案可行性验证阶段,并没有考虑实际在轨应用。Philen等[54]针对0.305 m口径半圆形反射镜,利用光纤传感器测量数据作为反馈结合PZT压电作动器搭建形面主动控制实验系统,如图9所示,控制后形面精度优于1 μm。Bradford等[11]利用激光干涉仪、90个MFC压电作动器和1 m口径的平面六边形固体反射面天线搭建实验系统,如图10所示,控制后形面精度优于1 μm。Lu等[30]利用两个激光位移传感器测量的数据作为反馈,控制0.2 m口径薄膜反射镜,如图11所示。Fang等[7]利用单目摄影测量系统、168个PVDF压电作动器和2.4 m口径充气薄膜反射面天线搭建实验系统。Lan等[55]基于单目摄影测量系统、72个PZT压电作动器和1 m口径的碳纤维格栅反射器搭建了形面主动控制实验系统,控制后形面精度优于40 μm。Shao等[16]设计了作动器位移放大机构,利用单目摄影测量系统和0.3 m口径壳膜反射器搭建了形面主动控制实验系统,控制后形面精度优于30 μm。
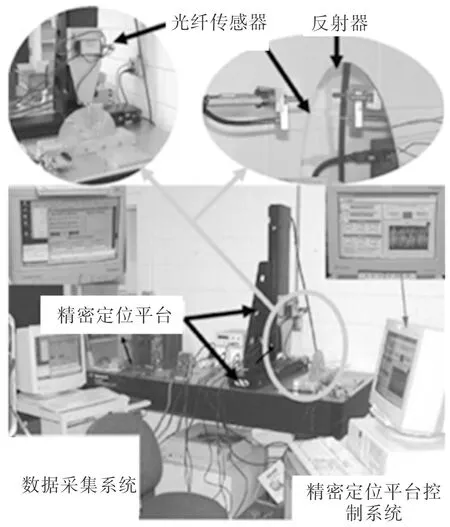
图9 利用光纤传感器搭建的实验系统[54]Fig.9 An experimental system is built using optical fiber sensors
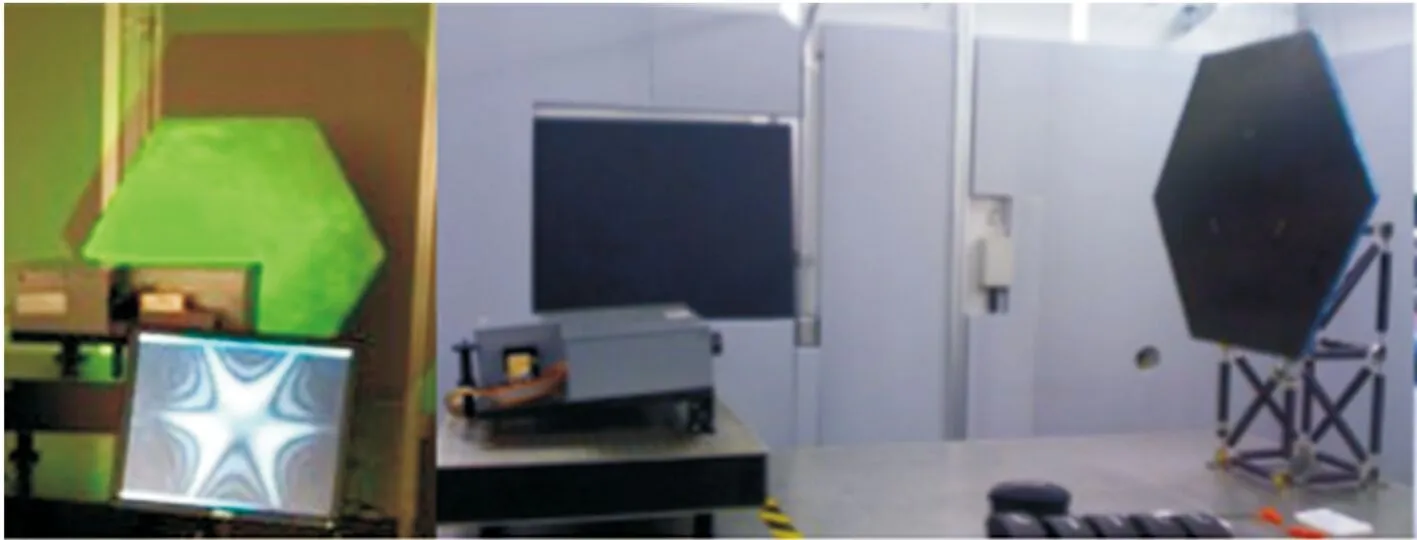
图10 利用激光干涉仪搭建的实验系统[11]Fig.10 An experimental system is built using a laser interferometer
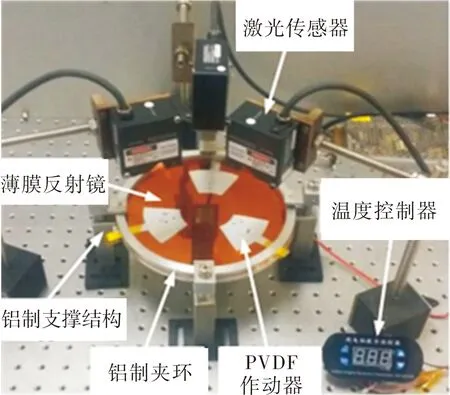
图11 利用激光位移传感器搭建的实验系统[30]Fig.11 An experimental system is built using laser displacement sensors
本文作者团队则针对0.65 m口径的主控格栅反射器,设计并搭建了一套适用于高精度反射器形面控制算法快速验证的实验系统。该系统利用DIC双目摄影测量仪获取反射器的形面变形信息,采用30个PZT作动器驱动0.65 m口径格栅反射器实现闭环高精度变形控制,如图12所示[51]。针对高精度形面控制测量精度不足问题,利用结构变形的连续性提高测量精度[74]。实验结果表明该系统结合FEL控制算法能够实现反射器高精度自适应控制,控制后形面精度优于15 μm。
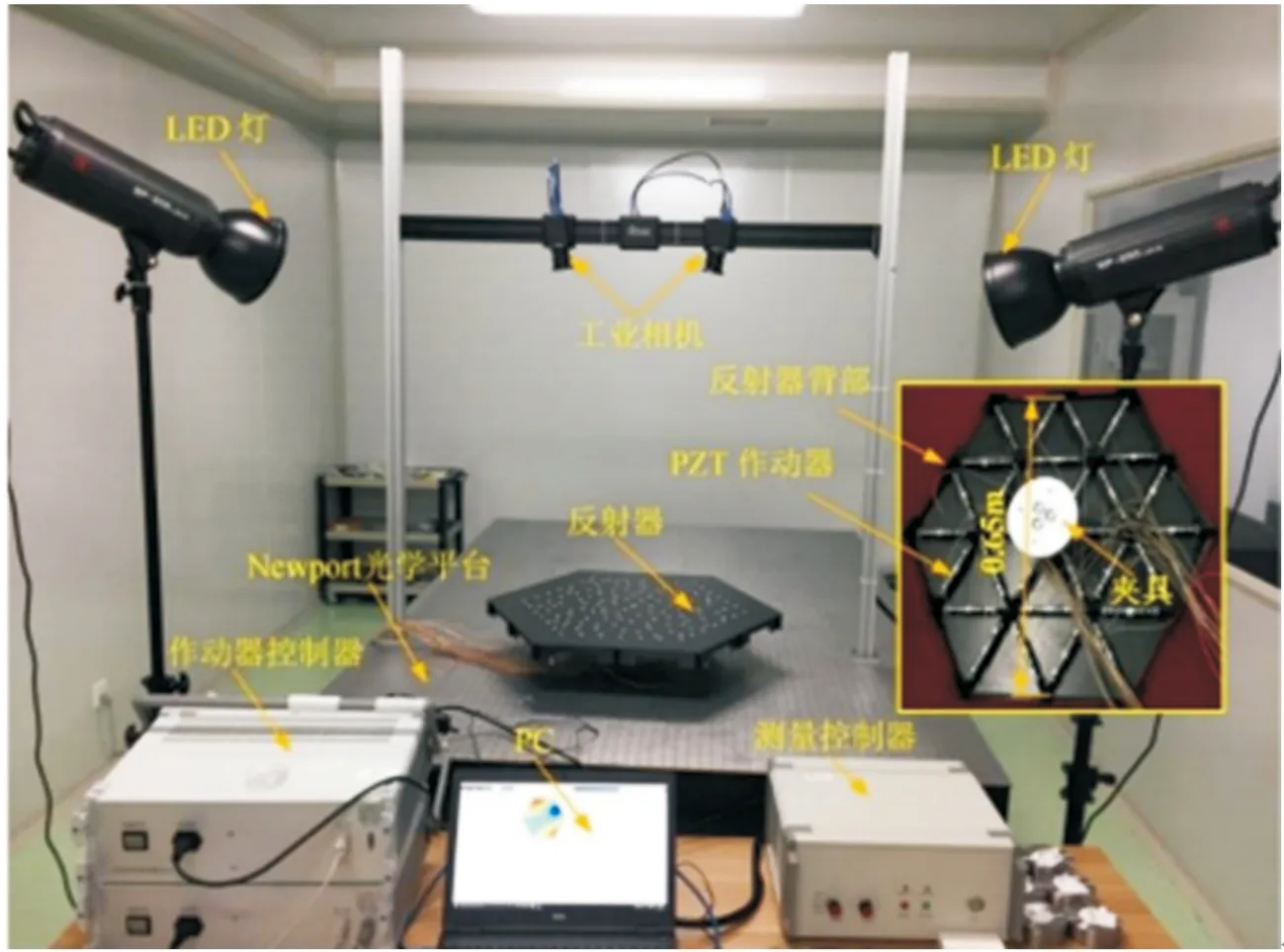
图12 格栅反射器形面主动控制实验系统[51]Fig.12 Active shape control experiment system of the grid reflector
6 在轨形面主动控制关键技术与展望
星载天线形面主动控制的需求是显然的和迫切的,但目前仍然没有在轨应用案例,归其原因在于天线反射器主动控制系统是一个复杂的系统工程,涉及的关键技术亟待解决,包括高精度形面变形测量技术、高精度和高稳定性的形面控制方法以及作动器技术。这些亟待解决的关键技术并不独立,形面变形信息是控制器的输入,作动器是控制输出的执行机构。因此适应空间环境的高精度形面变形测量技术和高定位精度作动器技术可降低控制设计难度。另外,目前高精度形面变形测量技术突破较为困难,可通过间接测量和控制器的设计来寻求解决方案。
1)高精度形面测量技术
高精度形面测量是实施形面主动控制的基础。相比于地面测量,在恶劣的空间环境(光、电磁、热和微重力环境)进行高精度的形面测量更为困难。利用摄影测量技术的实现在轨测量方案还需要进一步发展与论证。其他感知方法,例如利用光纤传感器测量少量离散点的变形,并结合结构变形的连续性预测形面误差;或者间接测量天线增益变化并结合已知的主动变形预测当前的形面误差,值得进一步深入研究。
2)高精度和高稳定性的形面控制方法
星载天线反射器形面主动控制方法应具有强抗干扰能力和高容错性。目前研究对控制系统抗干扰能力和容错性的关注较少。随着人工智能技术的发展,深度强化学习广泛用于非线性模型拟合和自适应控制研究。利用深度强化学习强大的非线性拟合能力和间接测量增益的变化,并结合主动控制理论发展自适应控制方法,值得进一步深入研究,这可能有效地避开直接测量形面变形的技术难题。另外对于阻尼小、质量轻的超大口径天线,形面主动控制过程中引起的残余振动问题也需要着重考虑。进一步,对于嵌入大量控制单元的大口径天线,传统的集中式控制或分散式控制理论难以有效地处理结构系统主动控制问题。这主要是由于控制器的阶次高,从而对控制系统计算机的计算能力产生过高的要求,导致无法实现一个真正的物理控制系统。分布式控制方案利用各控制单元自身的动态特性及其与周围单元的协作关系,以每个控制单元为基本模块设计最优控制器,通过大量基本控制单元的协同工作实现整个结构系统的控制,可以极大地提高计算效率和反馈速度,且具备良好的容错性和鲁棒性。
3)作动器技术
星载天线反射器控制系统的作动器是实施形面变形调整的主动执行机构。空间应用的作动器除了要满足高定位精度和快响应速度外、还需额外考虑作动器的功耗、空间高低温环境以及作动器体积和质量问题。作动器的驱动电能来自于卫星系统太阳能电池板,而卫星需要对大量的电子元件供电,因此低功耗作动器尤为重要,且作动器驱动后能够实现自锁以减少形面保持的能量消耗。此外,空间高低温环境下的热防护问题以及布线问题,这需要力学、电学和机械学等多学科的交叉融合。
7 结束语
星载天线是卫星系统的核心载荷,其发展涉及国家战略安全、民生以及空间科学研究。未来在轨形面主动控制技术是星载天线发展需要着重解决的关键技术之一,它的发展也将极大促进多学科领域的科技进步。文章详细介绍了天线反射器形面主动控制相关研究工作进展,提炼出了关键技术并对其进行了展望,预期为后续的形面主动控制技术研究与发展提供有益参考。
