车路协同系统中常用地图数据标准及其应用形式
2022-03-18陈胜华许一陈放
陈胜华 许一 陈放

关键词 自动驾驶;高精度地图;车路协同
中图分类号 U463.6 文献标识码 A 文章编号 2096-8949(2022)04-0023-03
0 引言
地图数据标准是应用系统进行互操作和信息通信的基准。目前,国际上地图数据标准以欧洲为主导。为此,我国相继出台了一系列政策措施,以加快车路协同和自动驾驶地图相关产业的商业化进程。国家发改委联合11部委,共同发布《智能汽车创新发展战略》,明确要构建智能汽车中国标准体系,重点制定车载关键系统、智能汽车基础地图等技术标准和规范。中共中央、国务院发布《关于构建更加完善的要素市场化配置体制机制的意见》,推动车联网领域数据采集标准化,并推动形成具有我国特色的自动驾驶标准体系[1]。
1 基于车路协同的自动驾驶新实践
自动驾驶技术是影响未来汽车产业发展的重要因素。随着自动驾驶产业技术的成熟和商业化程度的升级,汽车将不再是从属于人的驾驶工具,车的核心价值部件由体现动力和操作系统的传动系统转向体现自动驾驶水平的智能软件系统和处理芯片[2]。
目前,自动驾驶产业落地有单车智能(Autonomous Driving,AD)和车路协同系统(Cooperated Vehicle-Infrastructure System,CVIS)两种技术思路。其中AD主要依靠车载的传感器(如视觉、毫米波雷达、激光雷达等)、计算单元、线控系统进行环境感知、计算决策和控制执行。CVIS则是强调路侧智能感知,通过车联网将“人—车—路—云”交通参与要素联系在一起,助力网联汽车在环境感知、计算决策和控制执行等方面的能力升级,加速自动驾驶应用成熟。CVIS不仅可以提供更安全、更舒适、更节能、更环保的驾驶方式,还是城市智能交通系统的重要环节,也是构建新型智慧城市的核心要素。
无论是单车智能,还是车路协同,面向自动驾驶的高精度地图数据都是智慧城市的重要基础设施之一,也是自动驾驶行业中不可或缺的数据底座。
2 车路协同中的关键技术
车路协同自动驾驶则是通过高性能的道路感知和定位设备(如摄像头、雷达等)对道路交通环境进行实时高精度感知定位,按照约定的数据协议,与车端感知系统,进行数据交互,实现车与车、车与路、车与人之间的信息交互(网络互联化),并涵盖不同程度的车辆自动化控制(车辆自动化),以及考虑智能汽车与道路设施之间协同优化问题(系统集成化)。通过车辆自动化、网络互联化和系统集成化,最终构建一个安全、智能、便捷使用的车路协同自动驾驶系统[3]。
因此,实现面向自动驾驶的车路协同系统,还需要攻克一系列的关键技术,包括:
(1)多传感器融合感知技术:传感器高精度标定技术;目标检测与跟踪技术;融合检测技术。
(2)高精度地图与移动定位技术:高精度地图;路侧辅助定位技术。
(3)协同决策与协同控制技术:意图预测、博弈仲裁、引导调度等协同决策;车辆、设施、人类等协同控制引导。
(4)高可靠低时延网络通信技术:直连无线通信技术;蜂窝移动通信技术;交通系统集成优化与有线网络传输技术等。
(5)云计算技术:边缘计算MEC技术;多级云控平台技术;大数据和人工智能平台技术。
(6)功能安全与预期功能安全。
(7)物联网IoT技术。
(8)网络安全技术等。
基于上述分析可以判定,高精度地图数据及其应用,在车路协同系统和自动驾驶系统的关键技术中,均得到广泛应用。
3 车路协同中的地图数据需求
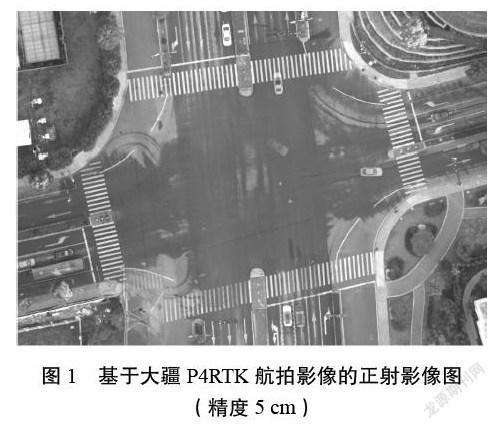
3.1 高精度正射影像图(TIFF格式)
正射影像图(Digital Orthophoto Map,DOM)是一种经过數字微分纠正和镶嵌,按一定图幅裁剪生成的图像。它是同时具有地图几何精度和影像特征的图像。DOM具有精度高、信息丰富、直观逼真、获取快捷等特性,可作为地图分析背景控制信息,也可从中提取自然资源和社会经济发展的历史信息或最新信息,为防治灾害和公共设施建设规划等应用提供可靠依据[4];还可从中提取和派生新的信息,实现地图的修测更新。
基于上述特征,正射影像图可以广泛应用于距离测量、地理要素识别的工作。正射影像图依据其测量功能,用于辅助多传感器联合标定。比如,车路协同系统中,大量的传感器部署在路端,每次经历恶劣气象条件后,都需要重新标定。基于正射影像图提供的稳定地物要素,如车道线、斑马线等特征,可以辅助多传感器的自动化联合标定。另外,基于正射影像图,可以用于提取地物要素,如车道线、交通标志,从而自动化构建矢量地图,如ShapeFile、OSM、XODR等格式的地图数据。
正射影像的成图投影采用中心投影,因为相片倾斜和地面起伏,会产生的像点位移,导致地物的形状和空间位置出现偏差。当前,基于无人机航拍影像,结合高精度RTK定位技术,正射影像图的精度能达到5 cm以内,并且能够大规模快速生产(如图1)。
OpenDrive是自动化及测量系统标准协会(Association for Standardization of Automation and Measuring Systems,ASAM)的OpenX系列标准之一,是一种用于对仿真测试场景的静态部分进行描述的开放文件格式,是目前主流的地图数据格式。已经在许多驾驶模拟解决方案中证明了它的可用性,如车辆动力学、交通模拟、情景模拟等。它由国际驾驶模拟专家组成的核心团队管理,他们协调并将输入的用户需求转换为格式的定期更新[5]。
OpenDrive文件包含了很多地图信息。其中,Header(头记录)及其子节点记录地理参考、数据库版本号等信息。标准定义的具体内容主要分为道路(road)和路口(junction)两大类。其本身设计面向的应用是仿真器,因而自动驾驶所需要的更多信息OpenDrive并未完全提供(Dupuis等,2010)。
3.3 城市三維模型
城市三维模型用于车路协同系统中,主要有两大类应用:为自动驾驶仿真提供真实的交通运行场景;为自动驾驶路径规划和三维可视化提供三维模型。
为提高自动驾驶感知系统的感知性能,自动驾驶仿真往往通过载入高精度城市道路三维模型,为多传感器融合检测算法提供更广泛的训练集数据。当前,自动驾驶仿真的主要平台CarLA,支持主流的城市三维模型和道路路网模型(.xodr格式)。RoadRunner软件是CarLA城市三维场景和环境的主要建模工具。RoadRunner建模工具,既可以手动建模和编辑虚拟的地图数据,也可以支持真实的地理数据,如航空影像、数字高程模型数据、激光雷达数据、道路地图数据。RoadRunner的输出包括三维建模文件(.fbx格式)、高精地图文件(.xodr格式),以及渲染工具Unreal和Unity的结果。其中,三维建模文件主要表达的是3D物理模型材质[6]。
4 地图数据的描述方式
信息化时代,所有事件都是以时间、空间为基本载体。面对天空地海一体的大规模多源异构和多维动态的数据流,地图的实时性、主题针对性、内容关联性、载体多样化、显示个性化、生产方法多样化、应用泛在化等特征,是以往任何时期都无法比拟的。
尽管地图数据的特征多种多样,但是,面向特定的地图数据应用场景,地图数据所需要考虑的属性,仅从几个方面,就可以较好地规划地图数据的生产和组织。
5 地图数据的构建流程和工具
高精度地图是对现实世界几乎路上的所有物体的三维的重建,因此精细化程度最高。高精地图的数据内容分为动态和静态数据。动态数据由实时路况层、交通事件层组成,静态数据则包括数据更新层、交通设施层、车道层、道路层的数据。相比较普通地图而言,高精地图增加了大量的几何信息、车道信息、交通标志信息。整个属性从40多种变成二三百种,相对精度达0.1~0.2 m,实现了精细化程度最高[7]。
5.1 构建流程
典型的地图数据生产过程包括:采集、清洗、要素提取、校验、数据组织与发布(如图2)。
在地图数据生产中,基于时间同步,不同的传感器观测系统,获取基于同一时间基准的观测数据,进而计算不同传感器之间的内参、外参。多传感器联合标定,是雷达点云的拼接、影像正射化、点云影像匹配的基础。采集过程中,由于信号可能不稳定(RTK在遮挡情况下,位置会漂移),通过SLAM等对设备的位姿信息进行优化,便于雷达点云的拼接和融合。
5.2 常见自动驾驶地图的格式及转换方式
自动驾驶地图的数据标准作为自动驾驶地图生产应用的指导性规范之一,是自动驾驶地图数据标准化的基准。
当前,国内外主流的自动驾驶地图数据标准有4种:导航数据标准(Navigation Data Standard,NDS)、OpenDrive、Lanelet2和开发道路地图(Open Street Map,OSM)。
NDS是一种用于导航系统的标准化物理存储格式,采用数据库技术存储数据,解决地图增量更新、地图数据扩展和数据安全问题。NDS格式以构建块(building block)来组织数据,如名称(name)构建块和兴趣点(point of interest,POI)构建块,每个构建块提供NDS的特定功能。NDS可以与OpenDrive格式进行互操作。
OpenDrive主要面向交通仿真,对自动驾驶所需信息,未能完全提供(Dupuis等,2010)。
6 结语
该文介绍国内外车路协同系统中常见地图数据标准及其应用形态:NDS、OpenDrive、OSM、LandLet2,并简单介绍了车路协同技术条件的高精度地图数据生产技术。研究主要基于现有地图数据标准,较少涉及主流标准之间的关联和优势分析。后续将深入研究该方面内容,助力建设全面支撑车路协同和自动驾驶产业的地图数据标准。
参考文献
[1]詹骄, 郭迟, 雷婷婷, 等. 自动驾驶地图的数据标准比较研究[J]. 中国图象图形学报, 2021(1): 36-48.
[2]陶璐. 高精度自动驾驶地图与传统导航地图路网匹配方法研究[D]. 武汉:武汉大学, 2017.
[3]Apollo5. 0社区. 2020. 03. 高精度地图OpenDRIVE规范[EB/OL].
[4]Bender P, Ziegler J and Stiller C. 2014. Lanelets: efficient map representation for autonomous driving[P]. 2014 IEEE Intelligent Vehicles Symposium Proceedings. Dearborn, USA: IEEE: 420-425.
[5]Dupuis M, Strobl M and Grezlikowski H. 2010. OpenDRIVE 2010 and beyond-status and future of the de facto standard for the description of road networks[p]. Proceedings of the Driving Simulation-Conference Europe 2010. Paris, France: [s. n. ]: 231-242.
[6]李克强, 戴一凡, 李升波, 等. 智能网联汽车(ICV)技术的发展现状及趋势[J]. 汽车安全与节能学报, 2017(1): 1-14.
[7]Navigation Data Standard. 2016. Publishing high-accuracy map standard for companies: industrial consortium pushes autonomous driving[EB/OL]. [2021-12-10]. https: //www. prnewswire. com/news-releases/publishing-high-accuracy-map-standard-for-companies-industrial-consortium-pushes-autonomous-driving-593363311. html.
2764501705245