基于数据融合的果园农情检测矢量无人机应用
2022-03-17李彦沛蒲岩岩赵鹏飞李坤建徐一珍
李彦沛,蒲岩岩,赵鹏飞,李坤建,徐一珍
(佳木斯大学 机械工程学院,黑龙江 佳木斯 154007)
0 引言
当前,多旋翼无人机在植保飞防领域已经有了长足的发展,但在一些复杂特殊场景下的应用还十分局限。同时,因为多旋翼无人机属于欠驱动型机构,在狭小场景下的飞行安全难以保障。针对农业作业场景下,机身需要携带大容量药箱及液体农药,在机动动作时药液在药箱内的相对运动导致无人机自身姿态受到干扰。针对以上问题设计了一种使用舵机控制电机姿态的模型,通过控制电机方向对力的作用位置及整体姿态进行解耦,实现了在保持主体水平情况下的多角度机动,使得灵活性大幅度提升。在此基础上利用数字波束形成雷达、多传感器数据融合,实现了对当前作业区域内果树的农情监测,并根据相关数据实现变量雾喷、仿形弥雾、喷雾授粉等作业功能。
1 机体结构
1.1 机构设计
本文在对滑环式全矢量无人机建模的过程中遵循整机质心与几何中心重合,各部分与质心完全对称且螺旋桨在飞行过程中保持桨型不发生形变的原则,通过对大地坐标系解算确立自身姿态变化。
滑环式全矢量无人机系统模型采用圆形滑环设计如图1所示,在两个滑环的中部均有舵机对整体姿态进行控制。滑环的设计使得动力电机提供的动力能够更加稳定地传递给机身,使得机构稳定性得到保障。两个滑环相互作用,实现了电机作用力的全矢量移动。常规多旋翼植保无人机利用的是强耦合的非线性系统,这种欠驱动系统使得在对于机身姿态的控制上呈现明显的模糊性,即只能通过机身整体的侧倾实现移动,控制精度极低。该模型所提出的结构将明显改善多旋翼无人机小范围机动条件下移动精度低的问题。
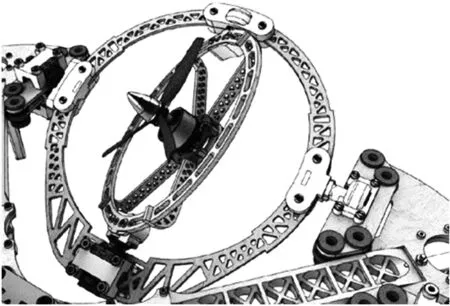
图1 机构设计
1.2 动力模型
滑环式全矢量无人机的动力是由无刷电机带动螺旋桨转动产生的,系统所产生的推力是伴随电机的转速变化而变化的。以悬停为例,此时无人机处于平衡状态且周围气流速度可视为0,则推力与扭矩可以定义为[1]
(1)
(2)
式中Ti—推螺旋桨推力,N;
Qi—空气流速,m·s-1;
ωi—螺旋桨转速,r·min-1;
ρ—空气密度,kg·m-3;
R—桨叶半径,m;
A—桨叶面积,m2,A=πR2;
CT—拉力系数;
CQ—扭矩系数。
2 控制系统
2.1 控制方案
为了弥补普通多旋翼无人机欠驱动的特性,同时实现位置运动与姿态角的解耦,该方案在电机的每个作用点上增加了两个舵机的控制量,同时使用滑环式设计实现了全矢量控制。滑环的设计使得电机动力能够更加稳定地传递给机身,使机构稳定性得到保障。两个滑环相互作用,使每个电机都能够独立绕各自机臂的俯仰轴与横滚轴顺时针或逆时针旋转。经过该机构的解耦作用,电机可以在保证一个倾角的状态下朝任意方向移动。
控制系统的整体结构及数据处理流程如图2所示,其包括传感器采集的原始数据与处理后解析得到的位置与姿态,通过机载运算设备进行姿态解算,并对上位机及遥控器数据进行判断与融合后计算出期望位置和姿态角,系统将数据解算为姿态与位置后分别由倾角补偿算法和姿态转换算法根据当前系统状态进行解算与补偿,最后控制分配算法将两者数据融合并输出当前无人机模型的姿态。位置控制和姿态控制的计算流程是基于PID控制设计的。

图2 算法流程
2.2 动力系统模型
根据基尔霍夫定律,直流无刷电机电枢回路的电动势平衡方程为
(3)
式中ua—电枢电压,V;
La—电枢电感,H;
ia—电枢电流,A;
Ra—电枢电阻,Ω;
ωe—电机转速,r·min-1;
Ce—电机常数。
电动机的电磁转矩Me可以表示为
Me=Cmia
(4)
式中Cm—电机转矩系数。
电机轴上动力学方程可以表示为
(5)
式中Jm—电机转动惯量,kg·m-2;
Mc—负载扭矩,N·m。
电枢电感很小,将其忽略可得
ia=(ua-Ceωe)/R
(6)
控制信号与输出转速的关系式[2]
(7)
式中n—阻力系数。
3 农情检测
在实际飞行中使用毫米波雷达向地面发出毫米波信号,通过返回的数据计算出与地面相对高度,将数据传回飞控系统从而操控无人机保持与地面相对稳定的飞行高度。通过数字成像雷达对正在飞行中的植保无人机下方进行扇形扫描并收集返回的数据,最终生成点云图像并提供给数据融合系统。通过多光谱相机对正在飞行中的植保无人机下方进行拍照分析,生成不同区间的可见光图像并提供给数据融合系统。数据融合系统根据点云图像和多光谱图像进行数据融合,评估出农作物的疏密分布情况并交给执行机构实时调整农药的喷洒用量,实现实时变量喷洒。
在实际作业中作业效果易受地势起伏影响,故在农情检测中使用毫米波雷达对地观测,实现无人机与作物之间的相对高度保持统一;在果园等易受果树冠层厚度及个体差异影响的场景,使用成像雷达通过反馈的点云图实现对植株的定位及对个体大小的评估,从而更好地匹配合适的药液用量;在普通田地中使用多光谱相机能够判断当前作业区域的植株疏密程度,实现全面的农情检测。农情检测算法流程如图3所示。
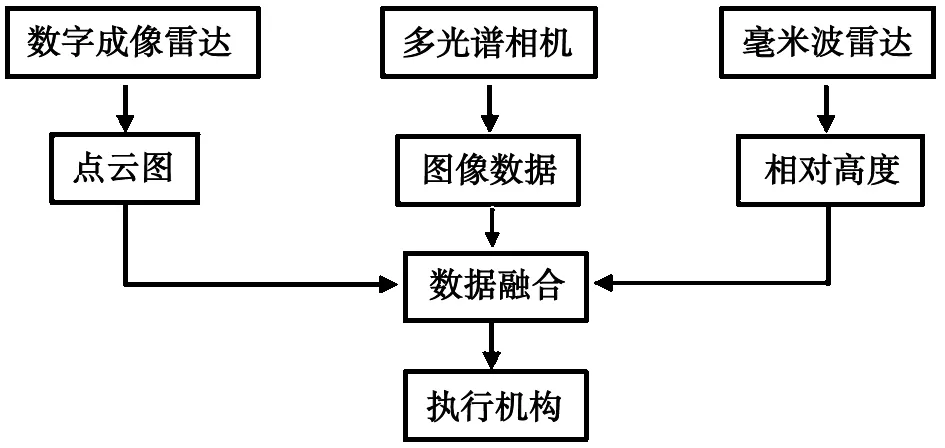
图3 农情检测算法流程图
4 多尺度图像融合
针对农田及农作物作业特征,使用数据融合技术对采集到的图像进行综合判断。基于农田的多尺度图像融合主要包括图像融合技术与坐标融合算法。即将飞行器在农田中实时采集到的不同波段的光谱相机在同一角度下拍摄的多幅图像进行实时处理,根据算法得到关于当前农田作业区域全面和准确描述的图像的处理过程。针对所处理的多光谱图像及点云图像的特点根据多尺度图像融合算法采用像素级的融合并得到融合的图像数据。融合后的图像包含了植物枝干的分布情况(来自点云图)和植物叶片的密度信息[3]。
在农田作业中使用多尺度图像融合技术是图像计算领域一大难点,农田场景因地势起伏、植被长势、植株特点及植物光谱等特点具有算法选择难、阈值设置多变等特点。多尺度图像融合采取视觉由“粗”到“细”感知方式从不同波段中分解出目标信息,再将目标信息结合特殊图像处理算法进行深度处理从而提取出农作物对应的特征信息。多尺度分解方法在图像边缘细节与全局近似信息分离获得了计算上的便利和可靠性。多尺度分析的图像融合算法流程如图4所示。
该研究使用的图像融合方法为基于多尺度分解的融合方法,将输入图像A进行尺度分解,再将输入图像B进行尺度分解,最终运用多尺度反变换对融合后的分解系数反向重构融合图像,融合后的图像是多个传感器图像的信息在一个图像框架内进行显示,其包含了植物的疏密程度及叶片的分布情况。图像融合算法生成的融合图像如图5所示。

图4 多尺度分析的图像融合算法流程图
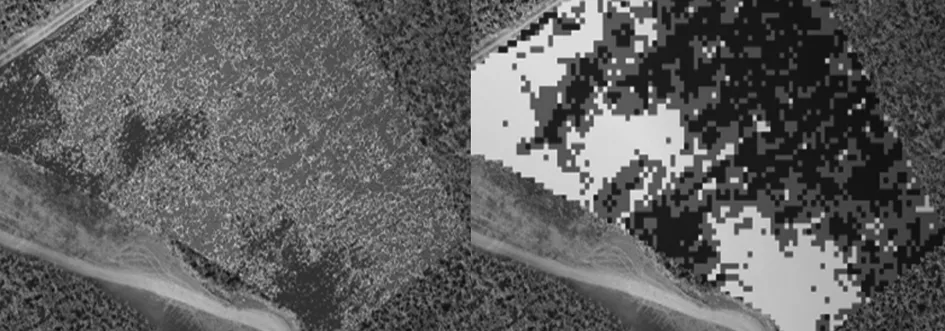
图5 图像融合算法融合图
5 结论
针对特殊复杂场景下狭小区域内多旋翼无人机机动不灵活的特点设计的滑环式全矢量无人机通过建立倾转全矢量方案,解决了由于耦合作用导致不能兼顾运动与姿态精度的问题,通过建立滑环式全矢量模型对植保作业中无人机的单姿态解耦模型,有效拓展了多旋翼无人机在农情检测中的应用范围,实现了植保作业效率提升。为了解决实际农田中因地势起伏、植被疏密程度所带来的实际作业效果的影响而引入农情监测系统,使用数字成像雷达、多光谱相机和毫米波雷达对作业区域进行实时检测,在保障作业安全的同时使用多尺度分析的图像融合算法实时产生当前作业区域的农田处方图,使得作业模块可以按照农情检测系统得出的结果实时调整作业方案及药液用量,实现了精准农业与绿色农业。
(05)
